 如何去构建仿真机器人工具
如何去构建仿真机器人工具

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31391浏览量
223547 -
LabVIEW
+关注
关注
2021文章
3688浏览量
348317 -
NI
+关注
关注
19文章
1126浏览量
105069
发布评论请先 登录
相关推荐
热点推荐
智能机器人从0到1系统入门课程 带源码课件 百度网盘下载
机器人 AI 交互:语音识别 + 视觉识别入门实践
在人工智能技术飞速演进的当下,机器人正从冰冷的自动化设备向具备感知能力的智能体进化。传统的机器人交互往往局限于单一的指令执行,缺乏对
发表于 04-11 16:41
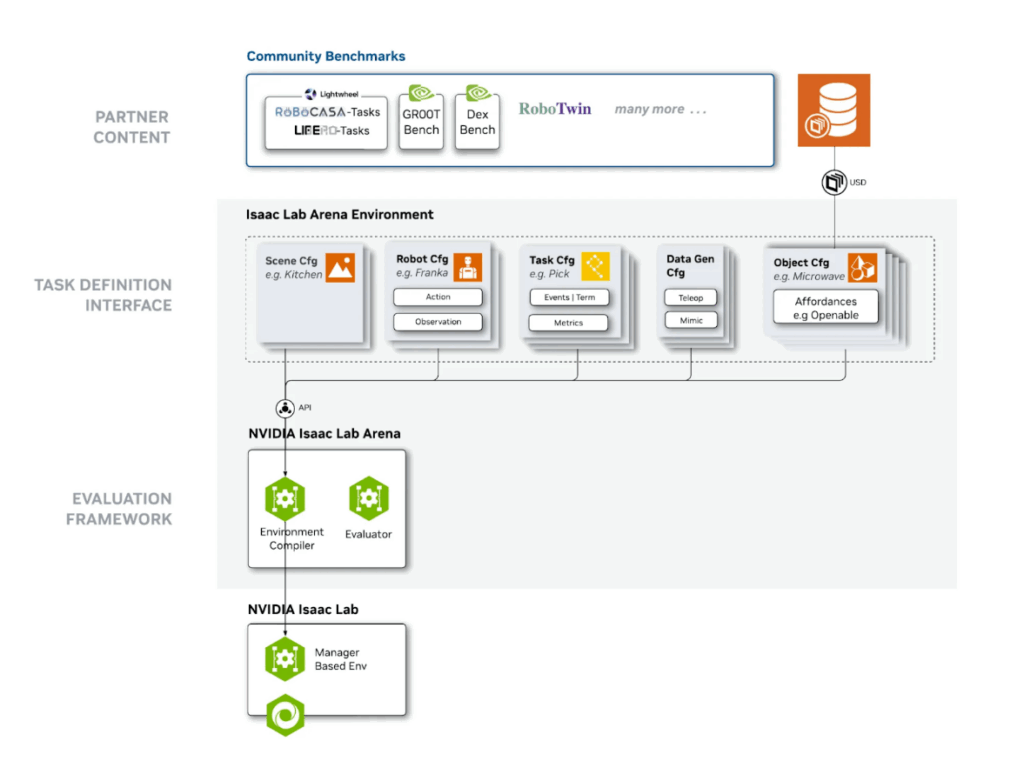
使用NVIDIA Isaac Lab-Arena简化通用机器人策略的仿真评估
通用机器人策略需要能够处理多种任务,适应不同形态的机器人,并在多样化的环境中运行。因此,仿真评估过程必须具有可扩展性且易于复现。目前,建立大规模的策略评估流程既繁琐又依赖人工。如果缺乏
借助NVIDIA Isaac Sim与World Labs Marble加速机器人仿真环境构建
一直以来,为机器人仿真构建逼真的 3D 环境是一项非常耗费人力的工作,往往需要数周的手动建模与配置。如今,借助生成式世界模型,开发者只需输入文本提示,就能在极短时间内生成一个逼真、可直接用于仿
攻坚农业仿真挑战:Robotec农业机器人仿真平台
3DGS与4DGS的核心应用实践与技术突破!全球农业正面临粮食需求增长、可持续发展压力及劳动力短缺等多重挑战,农业机器人已从未来愿景变为现实应用。真实环境中测试农业机器人成本高、周期长且存在安全风险,机器人

RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
。· 利用开发板上的MIPI CSI1和CSI2接口,完整接入8路摄像头,实现了所有通道的视频预览与采集,为机器人构建了全方位的视觉感知系统。卓越性能表现:· CPU占用率:34%· DDR占用率:50
发表于 10-29 16:41
如何借助OpenUSD提升机器人开发流程效率
机器人需求的日益增长,正以前所未有的规模推动对物理精确仿真的需求。通用场景描述(OpenUSD)是这一变革的关键,它为构建机器人可在其中学习的虚拟世界提供了强大的开源标准。
机器人加装Sycotec 4060 ER-S电主轴,破解不锈钢去毛刺难题
成本攀升等问题。随着工业自动化技术的发展,机器人与高性能电主轴的结合,为不锈钢去毛刺提供了全新的解决方案。其中,机器人加装Sycotec4060ER-S电主轴的组合,凭
什么是机器人?追溯机器人技术的演变和未来
的定义。机器人的定义,真如表面看起来那么简单直白?还是比我们所认为的更为复杂呢? 从本质上讲,机器人是一种可编程机器,能够感知、处理信息,并自主或在一定程度的人工指令引导下执行任务。与

NVIDIA助力构建人形机器人全身遥操作仿真平台
清华大学与银河通用机器人联合研发,推出了专为人形机器人全身仿真遥操作设计的平台 OpenWBT_Isaac。该平台依托 NVIDIA Isaac Sim 与 Isaac Lab 的强大仿真
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
阅读心得体会:ROS2机器人视觉与地图构建技术
通过对本书第7章(ROS2视觉应用)和第8章(ROS2地图构建)的学习,我对机器人视觉感知和自主导航的核心技术有了更深入的理解。以下是我
发表于 05-03 19:41
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
为了解决机器人里各厂商模块不通用的问题,让机器人快速开发
发表于 04-30 01:05
【「# ROS 2智能机器人开发实践」阅读体验】+ROS2应用案例
地图构建,包括算法原理介绍、安装与配置方法、仿真环境中的SLAM以及真实机器人上的SLAM。
这一过程不仅涉及到计算机视觉和机器人学的知识,还需要对ROS 2的节点管理和数据处理有一定
发表于 04-27 11:42
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
机器人技术的飞速发展,ROS 2 作为其核心工具之一,为开发者提供了强大的支持。与传统的理论书籍不同,本书深入浅出地讲解了 ROS 2 的架构、开发流程以及在智能机器人项目中的应用,以代码作为切入口,让人
发表于 04-27 11:24



评论