 智能网联下的平行驾驶与平行交通
智能网联下的平行驾驶与平行交通
本文为中国自动化学会副理事长兼秘书长、第29届国际智能车大会主席王飞跃教授刊发在《科技日报》的文章,他提出了一种智能网联下的平行驾驶与平行交通,一种解决未来出行多种难题的有效方式。
王飞跃 中国自动化学会副理事长兼秘书长、第29届国际智能车大会主席
中国已然成为世界上最大的机动车辆生产国家和最大的汽车销售市场,将来还有非常大的发展空间,在智能汽车领域也必将是如此。
智能汽车的终极目标,就是在完全真实的交通环境下,实现智能车的自主驾驶。这种场景不但变革人类出行方式,而且将重塑整个城市和社会形态。
相当程度上,这是整个社会的一场广泛而深刻的革命,我们需要新的思路和新的技术。
智能网联下的平行驾驶与平行交通
大家现在都很强调CPS(Cyber-Physical Systems),我的观点是要跳出CPS,迈向CPSS(Cyber-Physical-Social Systems),以后每个人开车不仅仅是在物理世界,同时还在心理世界和人工世界。未来一定是平行交通、平行道路、平行出行。物理的汽车跟软件定义的汽车要平行起来,物理的公路要跟软件定义的公路结合起来。这就是基于ACP(Artificial societies+Computational experiments +Parallel execution)方法的平行驾驶。
现在汽车公司卖汽车的时候总要给你一个手册,以后就给你一个可视化的软件来定义汽车,就在你手机或直接在汽车内部显示屏上,随便可以打开,三维可视化的软件车同物理车由IoT时时刻刻联在一起。
你在路上开,软件定义的汽车也在路上开。因为有了软件定义的车跟物理的车联在一起,就可以同时开在三个世界了,物理世界的车,心理世界的车,人工世界的车。这相当于你开车的时候,有许多软件定义的机器人在为你服务,有的监控车辆行驶的状态,有的帮你订餐馆、旅馆等,你开车就容易了,甚至可以在车上看书、聊天、线上会议等等。这就是CPSS空间里平行驾驶:目标不是100%安全,而是300%的安全,路安、心安、理安。
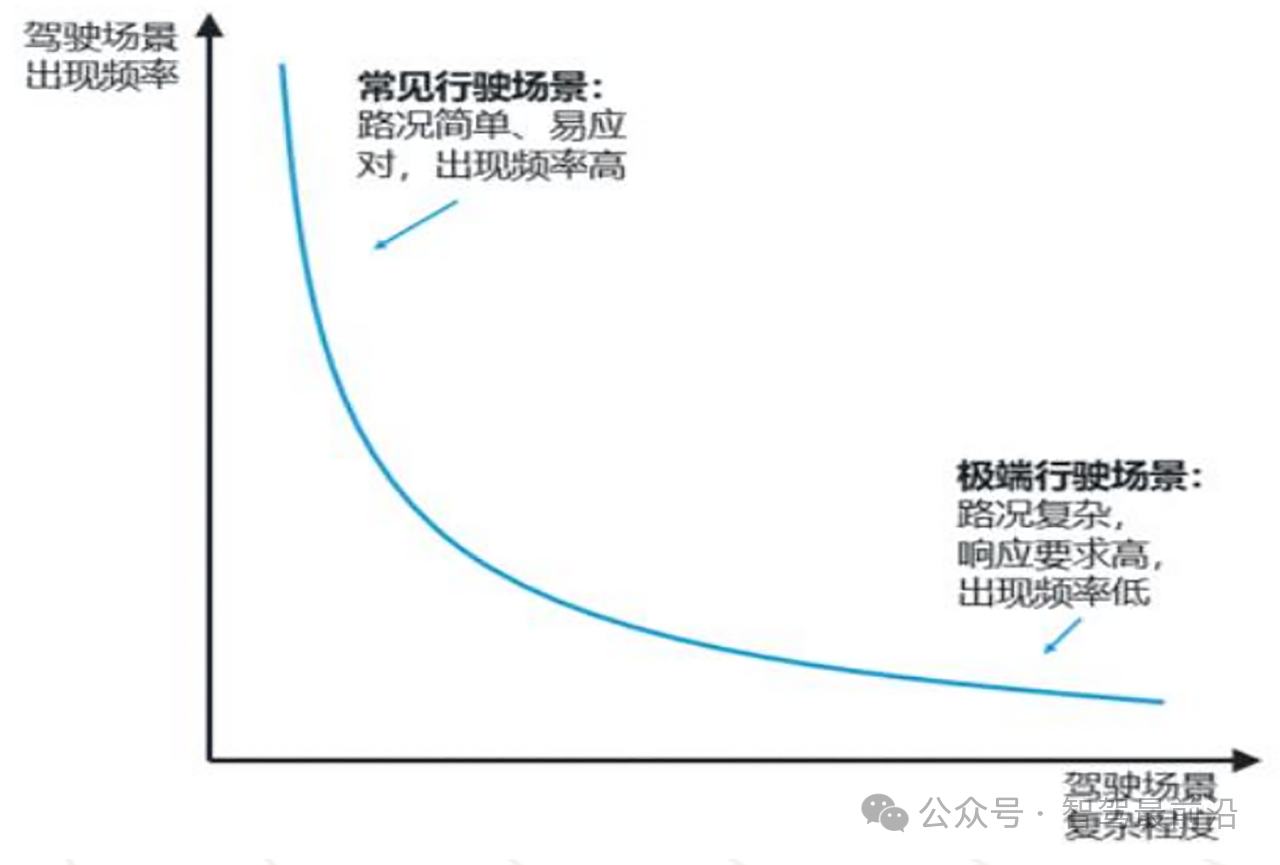
直面智能汽车的工程和社会复杂性
车不但在开的时候产生数据,开完了继续产生数据,做机器学习、平行学习,监控你的车况、更新交通法规、学习动态时空环境,确保接下来开得最优。其中有一连串的技术支持,所以远端智能跟当地智能要结合,远端可以复杂,当地智能操作必须简单。当然,安全是第一位的。研究智能汽车面临很大的工程复杂性和社会复杂性,会带来巨大的建模鸿沟,我们怎么克服?这个鸿沟要靠数据填,要把小数据导成大数据,把大数据提炼成为精准知识即小规则,然后再指导车的驾驶。对于汽车来说,物理汽车跟软件定义的汽车一起开,开的过程中产生数据,通过计算实验,再变成驾驶的大数据、小智能、精准知识,从而产生崭新的职业。将来会有学习工程师、培训工程师、实验工程师、决策工程师。我们就是把司机换了一个地方,以前在车上开,现在是在办公室开。
平行汽车会自主学习且越“老”越贵
现在的车越“老”越便宜,以后的车,越“老”越贵。因为它内部包含一批软件定义的车、软件驾驶员、软件服务员。甚至物理的车报废了,这批软件定义的车永远在,而且跟你的驾驶行为连在一起,它向你学习。
开始买的时候车都一样,但开了两年,就真正成为你的车了,也成为某个城市里的车了,甚至跟你邻居的车都不一样。
因为这里引入了Social 的因素,也是整个系统中最不确定、多样、复杂的因素,也是我们为什么认为,只有基于CPSS的平行驾驶,才能把自主驾驶L0 级-L5 级真正统一起来,把交通的智能化和汽车的智能化统一起来。
我们相信平行驾驶和平行交通,是解决未来出行多种难题的一种有效的方式。

-
智能汽车
+关注
关注
30文章
2902浏览量
107636 -
智能网联
+关注
关注
4文章
610浏览量
23337
原文标题:王飞跃:平行驾驶与平行交通:未来出行新思路
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
什么是平整度、平面度、平行度、共面度、翘曲度


“车路云一体化”系统方案,赋能智能网联汽车规模化落地?
CQTL/CQSL系列平行板连接器推荐
智能驾驶在城市交通中的应用
智能驾驶对交通安全的影响
自动驾驶的未来之路:智能网联与单车智能的交融
智能网联是否是自动驾驶落地的必要条件?
平行光源的优势:解锁精准检测的新境界

电源纹波平行线法与靠测法的区别
影响平行板电容器电容的因素
平行电流线对罗氏线圈的影响






 工商网监
工商网监
评论