 基于LRR和SRR的毫米波感知系统的GM的L1的系统架构
基于LRR和SRR的毫米波感知系统的GM的L1的系统架构
我在知乎写了一篇问答,在这里更自由一些,写一些我的看法。因为之前工作的关于,对于这个系统还是有所了解的。
GM在主动安全领域有几个组,在北美和之前欧宝都有,是一步步从L0开始做起的,在EP2和EP3的平台上
这是在E2和E3上做的
凯迪拉克的ADAS演进
我们先来说通用的故事,这个系统设计从配置上如下,是从单纯的警告,进入辅助到套件(L1),然后进入L2层级,特别是导入了外部的通信网络模块和地图来辅助这个L2做到更高效和安全。在从不同的功能演进的时候,凯迪拉克是一步步走过来的,在传感器配置,功能的实现过程中,从里到外有着比较深刻的演进。
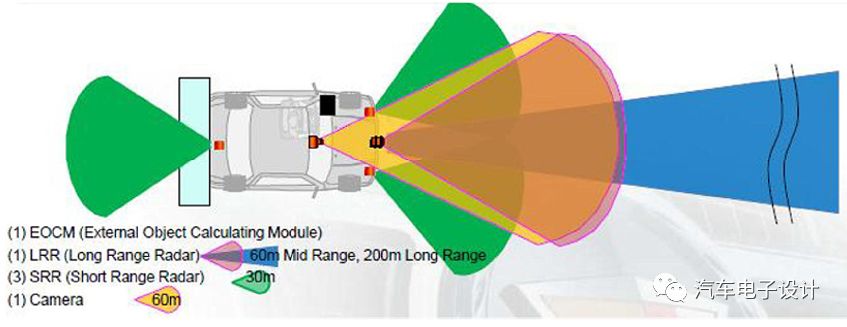
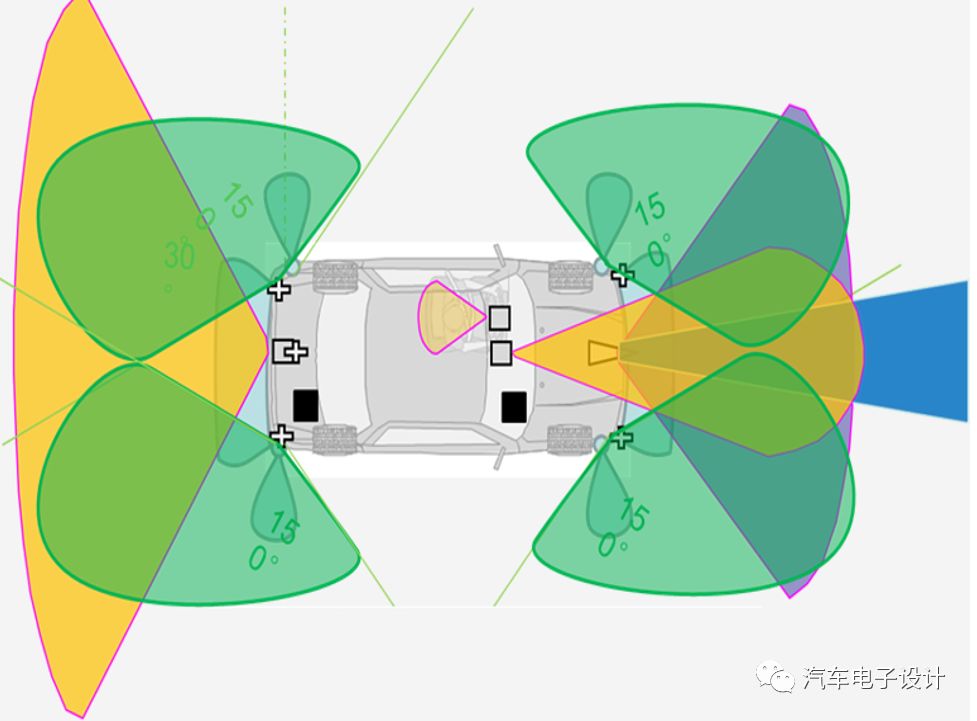
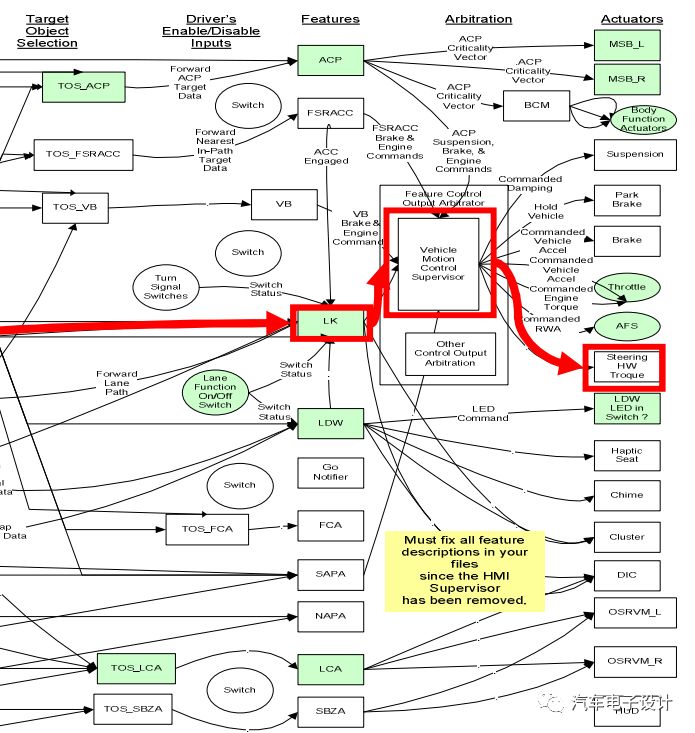
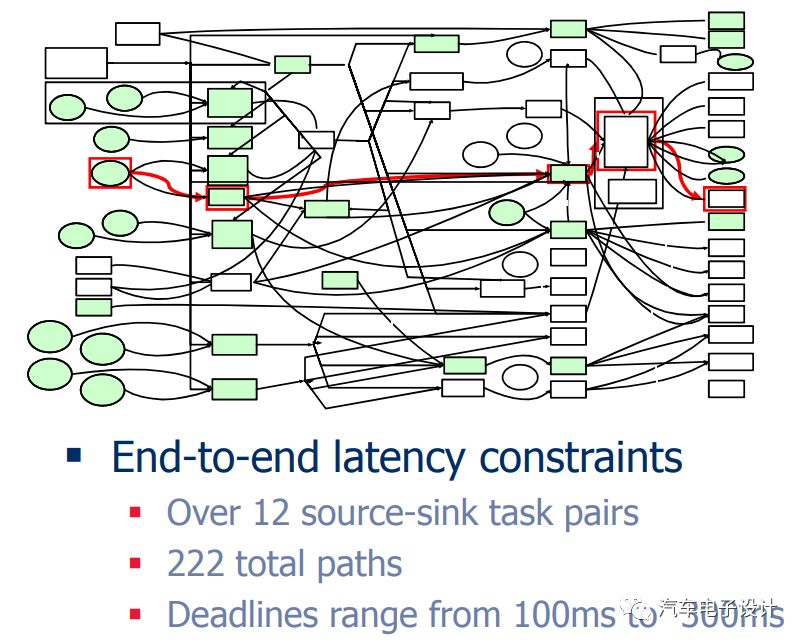
我们可以看到在GM的L1的系统架构,是基于LRR和SRR的毫米波感知系统,配合图像的融合来对四周的环境进行感知,处理器的核心是EOCM
备注:EOCM :external object calculation modules是通用有关于感知部件处理的单元的叫法,LRR和SRR是里面的长距离毫米波雷达和短距离的毫米波雷达
备注:这是之前概念设计里面有关于系统配置
到实用化之后,基本使用的内容都存在了
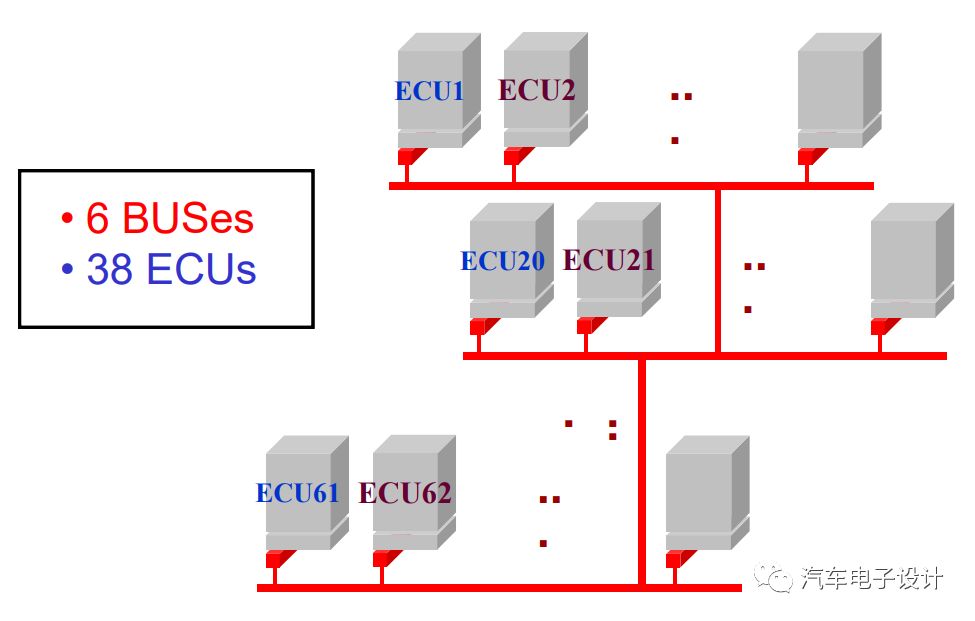
具备功能安全与网络安全双模块,从两个层面保证系统的安全性。系统拥有两个EOCM模块,实时进行互相备份,并在刹车系统、转向控制、驾驶员注意力监控等子系统,全面实现增强性冗余设计,以确保安全驾驶和行车安全。这段论述在一些软件架构里面有一个典型的图:
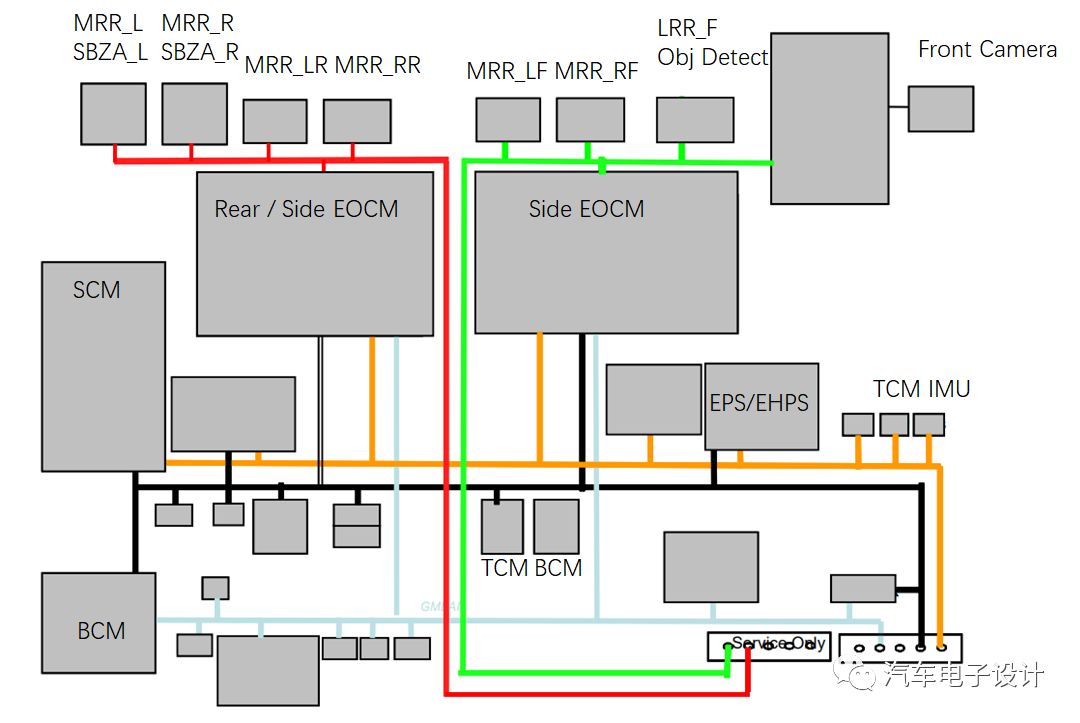
根据这个拓扑图,可以猜测用了感知的两根总线(黄色+绿色)
根据现在来看,左右个两根对等的是侧边雷达,而主长距离雷达和主摄像头模块分别挂两边
执行的总线也是挂上刹车、转向
大的模块可能还有那个地图模块,也需要与两个EOCM进行总线性质的集成
执行用了两根总线同时挂在这里(黄色+黑色),并使用原有的蓝色的作为通信总线传递基本数据信息
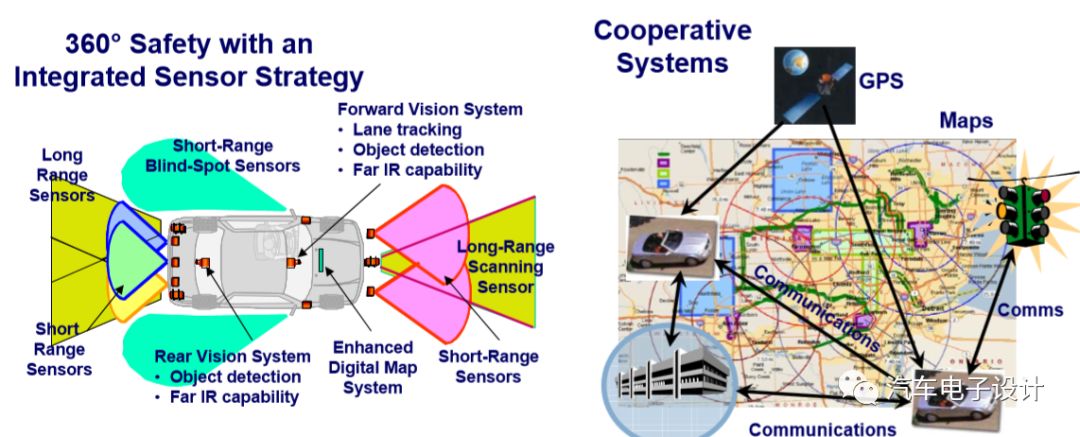
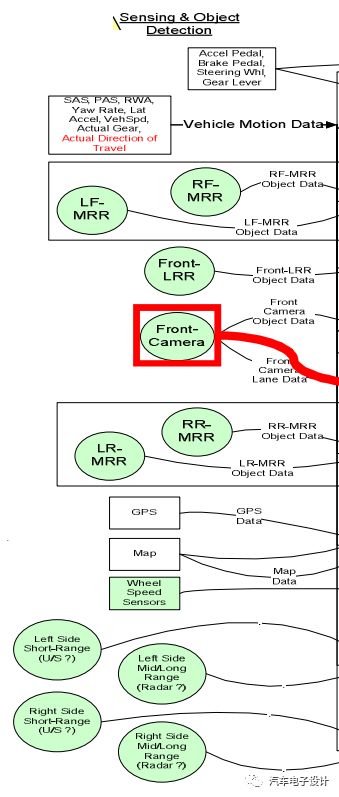
3种摄像头——前摄像头、环视摄像头、车内摄像头,3种雷达——长距雷达、短距雷达、超声波雷达,以及惯性导航.实时摄像头用于检测车道线与识别交通标志;雷达传感器用于探测其他的道路使用者,包括车辆、障碍物等
这里给了一个基本原理图包含了里面的功能融合的划分,由于存在两个EOCM,里面的功能给切分了,到底如何进行融合对比,实际比这个要复杂的多。做起来一块块的测试,这里只是做一个初步的探讨,仅供参考。
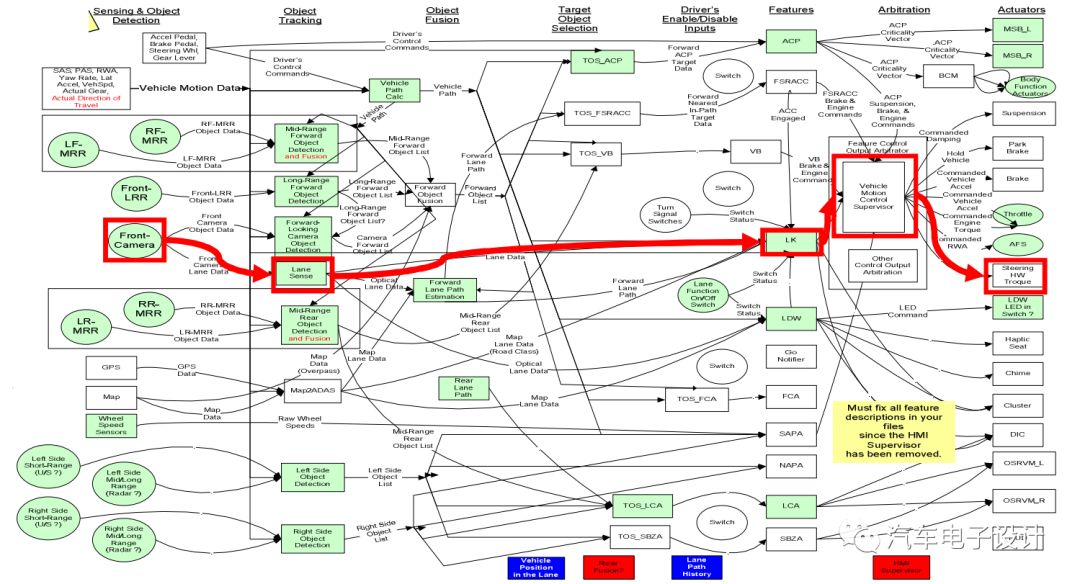
在上面的传感器里,这里都把传感器的信号做成了输入
在信号融合处理之后形成了
前向长距离的毫米波传感器感知
前向视觉感知
前向中等距离的障碍物感知与融合
前后后方距离障碍物的融合
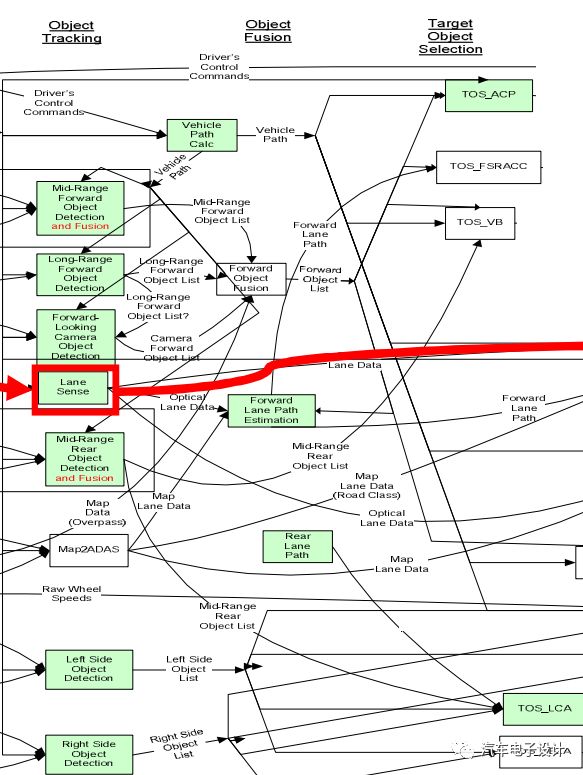
根据这些信号在形成前向信号的融合和前向道路的融合,其中道路融合是根据
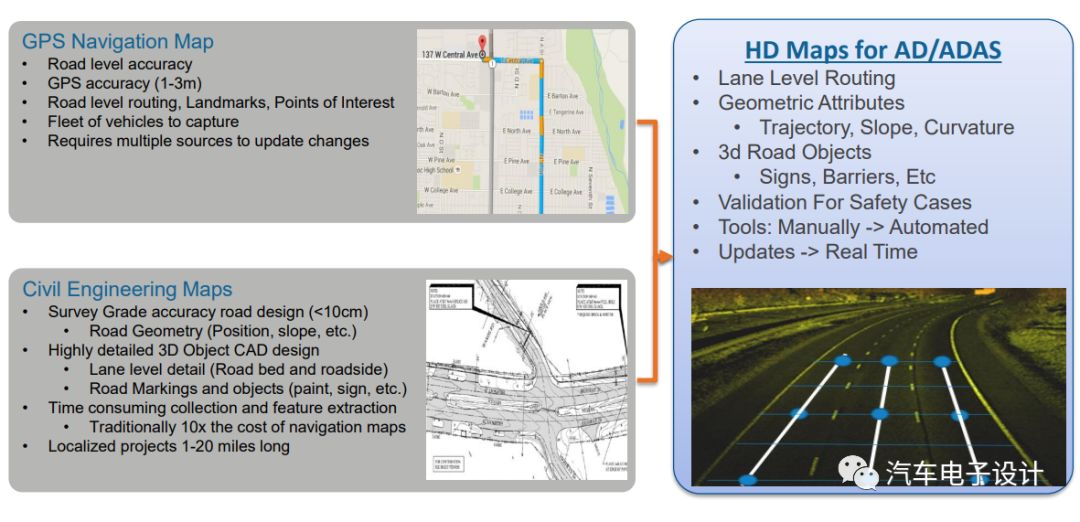
GPS+Map2ADAS的位置确定(这个Map2ADAS和完全的自动驾驶可能有一些差异,根据不同的路况条件有不同的做法)
前向视觉定位
备注:这里的概念设计到后面确实的通过T-box进行更新和发布道路信息是做了不少工作的
通过激光雷达来扫描地图,通过预先制作的高精度路网信息配合车辆的定位技术,可以保证避免以上的错误。高精地图记录了精确的道路绝对位置、车道信息、指示等信息,确保超级智能驾驶系统只在合适的道路条件下启动。为了达到车道级别的精确定位,在地面上建立了具有绝对位置的参考坐标点用于计算并补偿GPS信号穿越地球电离层产生的误差,这些补偿数据将被实时上传至云端,并下发到每一台装载超级智能驾驶系统的车辆上。这种突破方法将GPS数据的精度提升到亚米级别,有效地保障了该系统对车道的判断。目前所提供的实时方位数据的准确性是传统GPS的4-8倍。
这个地图的细节还没有具体发布
然后再形成一个个实际的功能组合
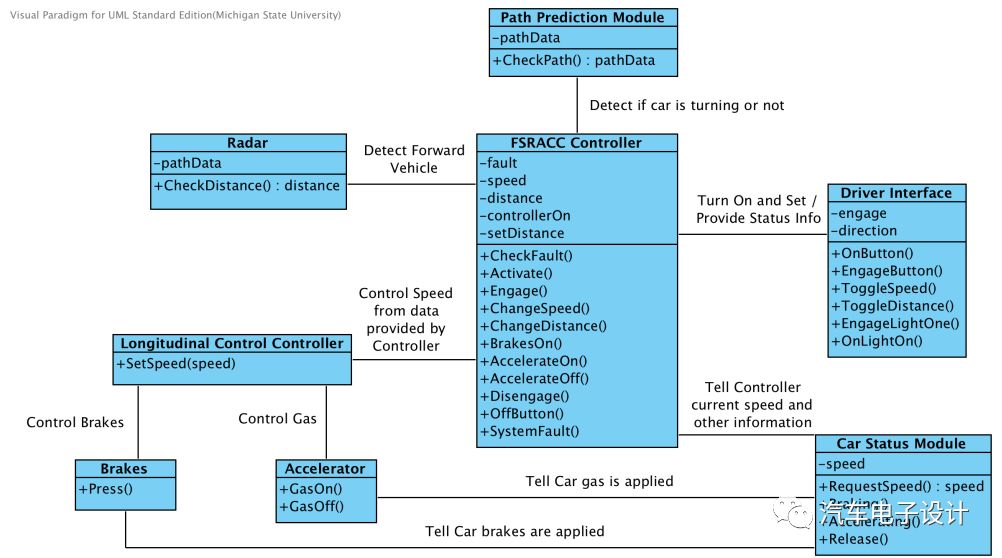
备注:以FSRACC为例,在Software Requirements Specification (SRS)里面做了一些基本的介绍
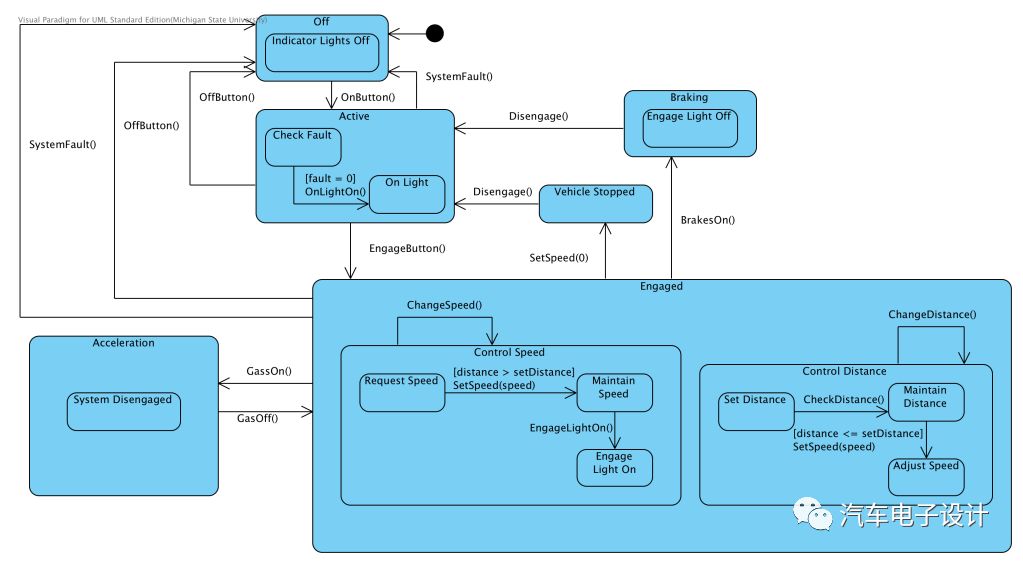
状态简图
我们看这个架构图,基本还是以一个分布式的系统来构建,以大部分成熟的技术上面来搭建新的功能。某种层面上,能够得到一个非常可靠的系统。从Tier1算法来看,也是建立在Mobieye这样成熟的视觉软件,融合毫米波雷达的信息来获取整个外部的信息。
分布式系统需要仔细考虑功能架构的软件处理的问题,在里面核心的每一个软件功能,信号输入的时候,需要考虑实时性。
短期内,车企开发L2系统都是经由现在来做的;从长远来看往L3和L4的架构,需要在架构上革新。所以从这个角度来看,GM的这个架构往前再走一步,基本上也是需要类似与ZFAS一样做一个集总式的设计,考虑把各种通信的工作在内部进行,然后考虑加大运算速度。
-
传感器
+关注
关注
2547文章
50522浏览量
751415 -
通信网络
+关注
关注
21文章
2025浏览量
51932
原文标题:Super Cruise系统架构的信息
文章出处:【微信号:QCDZSJ,微信公众号:汽车电子设计】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
2019年1月中国毫米波雷达市场,维宁尔SRR夺冠占32.4%,博世LRR称雄占40.1%






 工商网监
工商网监
评论