 一家在毫米波雷达领域十多年经验的公司跨入汽车领域
一家在毫米波雷达领域十多年经验的公司跨入汽车领域
川速微波成立于2006年,技术班底源自于中科院电子所,公司发展已有十多年的历史,微波雷达技术积累深厚、研发人员系列完备、微波测试仪器设施齐全,产品化经验丰富,并具有科学规范的微波雷达大规模生产体系。
公司的核心技术源自于中国科学院、中国电子科技集团、中国航天科技集团的顶级科学研究院所,核心人才来自于中科院、北京大学、西安电子科技大学、成都电子科技大学等技术院所和高校,硕士以上占比80%。
目前公司在北京科技开发区建有生产基地,占地规模近2000平米,配有完善的加工、测试、调试场所和环境试验场所,对用料采购、生产、检验、质量和售后等多方面都有强化的资源配置和规范化管理。
公司在交通雷达领域、安防领域,积累了大量雷达测试经验和数据,包括各种应用环境、各种车辆、各种天气状况,为车用雷达对各种复杂路况、各种车型探测、各种天气状况的适应性,都提供了丰富的数据支撑。公司主要的产品有测速雷达、流量检测雷达、安防雷达,在业内有广泛的应用。
跨入汽车领域
在微波雷达技术上,川速微波通过多年的探索积累,拥有雷达系统总体设计技术、射频与微波天线技术、雷达信号处理技术等三大核心技术,能够独立自主、科学规范地完成复杂体制的雷达系统设计和开发。
公司在各类雷达产品的研发中,掌握并应用了多普勒体制、线性调频连续波体制、跳频体制、脉冲压缩体制、相控阵雷达体制、MIMO等多种雷达系统设计。
川速微波掌握多种形式大规模微带阵列天线设计技术,能够灵活选择适用于车用雷达布局的阵列天线,增加天线带宽、增加加工容差、设计容差。在各种雷达信号处理流程和算法上,形成了清晰地模块化信号处理流程,生成了一系列成熟可靠的算法模块,方便快速移植和算法升级。
同时,十多年来积累的系统化工程问题的解决方法,给雷达从样机到产品转化过程提供了可靠有力的保证。
观察到汽车雷达市场的崛起,公司于2012年正式立项研发24GHz频段汽车雷达产品,包括24GHz前向汽车雷达、24GHz环境感知雷达产品,目前相关产品都已实现批量生产和供货。
图: 24GHz汽车雷达系列产品
2014年初公司开始研发77GHz频段毫米波汽车雷达产品,并成为首批获得飞思卡尔(现被恩智普收购)77G毫米波汽车雷达芯片样品和技术支持的公司之一。
基于飞思卡尔MR2001系列微波芯片套片,开发了初始版本的毫米波汽车雷达原理样机,并在此基础上进行原始数据采集和算法开发。后推出第一代中远程毫米波汽车雷达产品,已给到部分OEM厂商试用,如南京金龙客车、长江汽车、云乐汽车。
图:公司的第一代单芯片毫米波汽车雷达
跨界需要哪些能力?
川速微波是一家在毫米波雷达领域积累十多年经验的公司,但在汽车领域,还是一个“新人”。
以往的经验虽然在技术实现上能有所帮助,但汽车行业有其特殊的属性,为了适应新领域,公司也针对性的进行了一些调整。在汽车雷达市场,公司针对不同的功能需求和市场需求,开发了系列汽车雷达产品。

图:川速微波汽车雷达系列产品全览
公司研发的24GHz单目标盲点监测雷达是一款中端盲点监测雷达,是单发单收的结构,在0.3m-15m的测量距离内,精度可达0.3m。
安装于车辆左右尾灯附近,用于短距离范围内监测本车后视镜区域盲点;当监测到侧后方盲区有靠近本车的移动物体时,可进行实时报警,以提醒驾驶员谨慎处置,避免发生侧撞事故。
该雷达传感器可用于车辆后方、前方、侧方小区域范围的 BSD 功能,以及LCA、后向穿越车辆报警、开门辅助、后方碰撞预警、前向车辆报警等 。
图: 24G多目标盲点监测雷达
24GHz 多目标盲点监测雷达,采用2发3收的结构,适用范围为0.5m ~ 50m,精度为0.3m。适用于中短距离区域、宽方位角度范围探测,以及多目标识别与跟踪,获取目标速度和距离、角度信息。可实现BSD、LCA、RCTA、(EAF) 。
77GHz 毫米波频段的雷达产品,采用 3 发 4 收架构, 3 个发射天线具有不同的波束角宽度,可同时实现远、中、近三种探测模式。
最远的探测距离 200 米,距离分辨率远程可达1.6米,中程(1-100m)可达0.8米,近程(0.5-50m)可达0.4米。中距模式下,能够实现大多数道路环境下的 ACC、 AEB 功能。
图: 77GHz毫米波雷达
雷达的单/多目识别
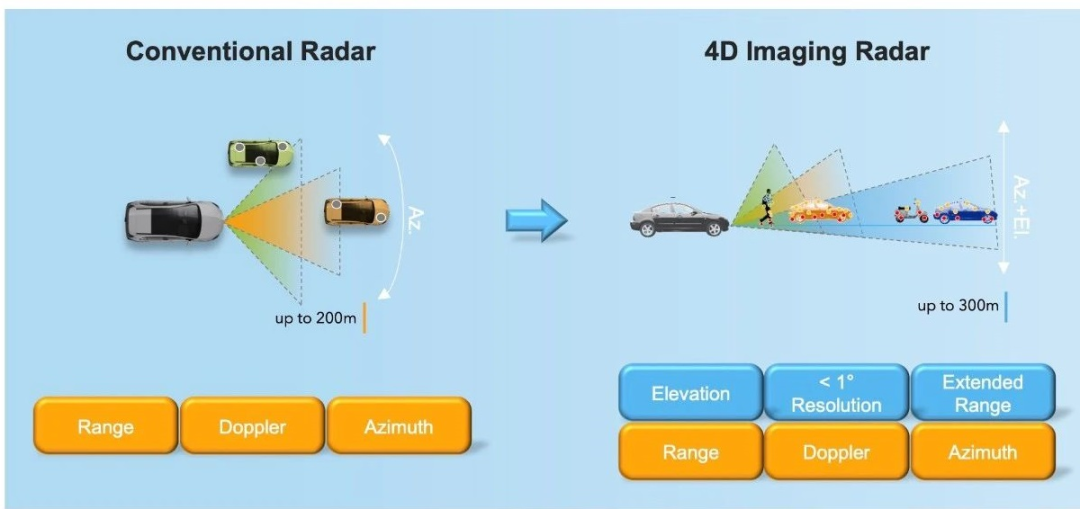
汽车毫米波雷达传统的功能是测障碍物距离,能够适应多种恶劣的环境。但随着自动驾驶的发展,车身传感器的丰富,毫米波雷达也受到了来自于视觉、激光等传感器的挑战。
为此,毫米波雷达也在拓展着新的可能,比如识别更多的障碍物,识别更远的距离。
目前毫米波汽车雷达有单目标与多目标识别的功能,他们往往是根据雷达系统只输出一个目标的信息,还是输出多个目标的信息进行区分。
雷达系统本身可以从距离维、速度维、角度维进行目标的区分。雷达其实都有一定程度的多目标识别能力,只要被检测的两个目标在雷达距离分辨率、速度分辨率、角度分辨率之上即可。
在通常的定义当中,多目标更多的是指是否有探测目标方位角的功能。没有测角功能,同距、同速的目标会被雷达判定为一个目标;有测角功能,当目标处在同距、同速上也是可以被一定程度的区分开来。
藉此,具体到雷达系统设计上,就主要在于雷达是否有多个接收天线或多个发射天线,通过天线的排布设计,发射波形设计和信号处理可以实现符合不同应用需求的测角的功能。
除了功能实现,在算法实现上多目标的识别在跟踪技术上会进行X-Y方向的二维目标跟踪滤波,相对于单目标基于直线运动模型的一维目标跟踪滤波,多目具有更高的准确性和可靠性。
公司的24GHz毫米波雷达分单目标环境感知和多目标环境感知,其中多目雷达能探测多个目标,对多个车辆目标进行识别和跟踪,目前已经处在量产阶段。而77GHz毫米波雷达在近距模式下,也能够实现非机动车、行人等目标的检测与识别。
更进一步的融合
毫米波雷达本身功能虽然在不断的演进升级,但在既有的技术条件下,同其他传感器融合,实现部分智能驾驶功能的情况还不会改变。
部分先行落地的ADAS功能,基于可靠性的考虑,大多会使用雷达+视觉融合的方式。尚处早期的国产供应商,很难有具备融合原生方案的能力,川速微波也在积累着经验。
在目前的自动驾驶传感器配置中,视觉有很高横向、纵向角度分辨,可区分颜色,无测速功能,受光线、雨雪天气影响;激光雷达有很高横向角度分辨率,较高纵向角度分辨率,有测距功能,无测速功能,受雨雪天气影响;毫米波雷达有测距、测速功能,拥有全天候工作能力,但角度分辨率比较低;超速波雷达工作距离短,易受干扰。
各种传感器功能特点不一样,有优点也有缺点,可以通过信息融合实现功能互补,也可以通过信息融合实现安全冗余探测。
目前融合多见于视觉与毫米波雷达的融合,常见的都是在传感器目标输出层级的融合,未来会趋向于在更底层的数据层级上做融合,需要面对处理能力、数据带宽等方面的巨大挑战。
融合过程中要解决诸多核心问题,如多传感器融合的系统架构、传感器配置与布局;具体到各个传感器,基于机器学习智能信号处理方法、数据信息深度挖掘;基于目标属性的空间域传感器数据匹配方法;同维度、跨精度多传感器数据融合方法;不同天气状况、不同应用场景下各传感器数据置信度动态分配模型;不同维度数据的综合目标识别模型、决策模型。
对于一家毫米波雷达出身的企业而言,要解决的问题还有很多,而在汽车零配件国产化的过程中,这样的坎儿也是必须要迈过的。
-
数据采集
+关注
关注
38文章
5880浏览量
113497 -
毫米波
+关注
关注
21文章
1912浏览量
64663 -
微波雷达
+关注
关注
4文章
87浏览量
21732
原文标题:微波雷达老字号深耕十数载,今朝携NXP杀回汽车领域 | GGAI首发
文章出处:【微信号:ilove-ev,微信公众号:高工智能汽车】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

毫米波雷达是声波还是电磁波
基于毫米波雷达的手势识别算法
一文带你了解毫米波雷达

毫米波雷达与超声波雷达的区别联系
国内4D毫米波雷达厂商名录





 工商网监
工商网监
评论