 关于蓝牙控制Atmel制造的机器人手臂的介绍
关于蓝牙控制Atmel制造的机器人手臂的介绍
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28762浏览量
208972 -
爱特梅尔
+关注
关注
0文章
197浏览量
22079
发布评论请先 登录
相关推荐
STM32的医疗康复机器人手臂控制系统
器设计的医疗康复机器人手臂控制系统,具有杰出的功耗控制和电机控制的高级定时器,能产生3对可配置并互补输出的PWM信号。通过在Simulink上建立双闭环PID算法模型,得到合适的PID
发表于 08-22 09:31
用意念控制的植入式机器人手臂
电子发烧友网核心提示:查尔姆斯理工大学的研究人员已经开发出世界第一个使用意念控制的植入式的机器人手臂。“骨整合”的技术是意念控制假肢的关键。患者脑电波意念脑电波脉
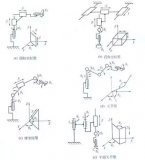
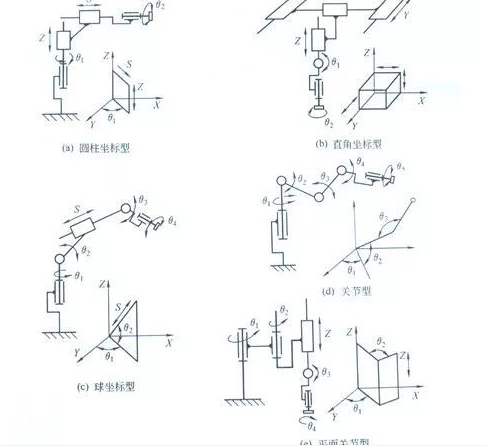
机器人手臂5种不同的运动组合
一般机器人手臂有3个自由度,即手臂的伸缩、左右回转和升降 (或俯仰)运动。手臂回转和升降运动是通过机座的立柱实现的,立柱的横向移动即为手臂的横移。
关于智能机器人手臂机械结构和接线分析制作
肘部的最大位置不能超过140度,因为该项目的目的是在平面上构建机器人手臂,并且将摄像头与用户处保持在同一高度。我们认为只用70度即可,因为这足以弯曲机器人手臂。
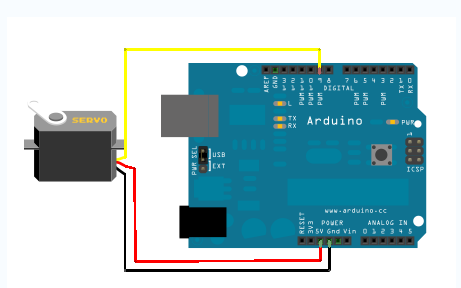
怎样使用Android手机的蓝牙控制机器人手臂
在这个项目中,我将向您展示如何构建Arduino&amp; amp;使用Android手机的蓝牙控制机器人手臂。该机器人手臂可以在手动模式下操作,也可以在全自动模式下进行编程。
在未来机器人手臂将可以替代人类的双手
随着5G技术的普及,即将迎来AI人工智能时代,很多场景将是无人自动化的控制生产运作,这样我们需要更多的机器人手臂,机器人手臂可以将执行工作的手臂与思考工作的头脑分离。
发表于 09-17 09:41
•2061次阅读
Arduino与树莓派打造Chatbot语音控制机器人手臂
在网上有许多关于制作机器人手臂的项目,但他们都有类似的控制方式,我感觉缺少了一些乐趣!所以我们决定制作一个可以使用聊天机器人控制的
发表于 03-16 11:47
•30次下载
中国科大展示软体机器人手臂在日常生活中的巨大应用潜力
软体机器人手臂由于具有本质柔顺性和连续变形特性,在智能制造、医疗康复,家庭服务等领域有巨大的研究价值和广泛的应用前景。最新一期的机器人顶刊《The International Journal
机器人手臂使用哪种型号的泰和承比较合适
机器人手臂的伸缩、横向移动均属于直线运动。实现手臂往复直线运动的机构形式比较多,常用的有活塞油(气)缸、齿轮齿条机构、丝杠螺母机构以及连杆机构等。由于活塞油(气)缸的体积小、重量轻,因而在机器人
发表于 03-17 17:16
•650次阅读
Arduino机器人手臂
方案介绍MARK 1是可编程的Arduino机器人手臂。但是,还不止这些,该机械臂可以由手势控制。硬件部件:Arduino UNO × 1个 伺服马达MG996R× 6 5V电池组× 1个
发表于 12-30 14:42
•3次下载
用于Arduino Due的DIY Braccio机器人手臂护罩
电子发烧友网站提供《用于Arduino Due的DIY Braccio机器人手臂护罩.zip》资料免费下载
发表于 06-14 15:07
•0次下载








 工商网监
工商网监
评论