 东京大学研发出自适应性无人机
东京大学研发出自适应性无人机
援引美媒消息称,东京大学Jouhou System Kougaku(JSK)实验室的研究人员开发了一种称为DRAGON(Dual-rotor embedded multilink Robot with the Abilityof multi-deGree-of-freedom aerial transformatiON)(十分有趣的缩写)的模块化变换无人机,它代表“高自由度并具备空中转换能力的双转子嵌入式多重连杆机器人”。DRAGON在复杂的环境中可将其自身形成正方形或蛇形的能力,在管道风扇保持漂浮的能力也令人印象深刻。
图片来源于网络
根据IEEE Spectrum的说法,DRAGON可以自主地总结哪种形状在面对空间限制或奇怪环境时最为高效。JSK的研究人员并没有专注于可以自然穿过复杂房间或环境的小型无人机,而是试图开发一种灵活的无人机,可以穿越各个地区,并且无需达到微型或纳米无人机的尺寸。
DRAGON由众多模块组成,每个模块都有双螺旋桨作为推进器,并且可以指向任何方向。这些模块通过连杆连接在一起,这意味着一个模块可以根据需要进行转动,而不会影响其他模块。可以把它想象成一条可以独立移动身体各部分的蛇,或者是一只猫头鹰如何在不移动身体的情况下完全旋转头部。
虽然电池组为DRAGON提供了三分钟的飞行时间,但让它自主运行的软件是建立在英特尔的Euclid软件开发套件(SDK)上的。这里看到的原型由四个模块组成,其中Euclid沿着其脊柱运行,而不管形状如何。目前,DRAGON可以飞行直线,方形,“L”形,锯齿形或螺旋形。
当大多数无人机看起来都一样并且具有非常类似的动作时,DRAGON的高度模块化变革能力令人十分印象深刻。
-
无人机
+关注
关注
230文章
10514浏览量
181743
原文标题:东京大学创造出自适应性无人机——DRAGON
文章出处:【微信号:youuav,微信公众号:无人机网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
科技防线:无人机干扰系统如何保障空域安全 特信无人机反制
如何在自己的固件中增加wifi自适应性相关功能,以通过wifi自适应认证测试?
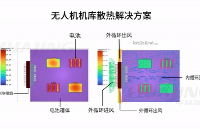
无人机机巢散热解决方案
特信无人机反制|无人机运营合规的必要性:探讨无人机运营合格证的作用与用途
特信|无人机反制系统发展面临技术瓶颈、法律伦理困境与社会经济难题挑战





 工商网监
工商网监
评论