 新型“机器蟑螂”可行走、下水和在水面上游泳
新型“机器蟑螂”可行走、下水和在水面上游泳
美国哈佛大学的研究人员基于蟑螂的水下生存和移动能力,研制出新型蟑螂仿生机器人。该机器人既能在陆地上行走,又能在水面上游泳,必要时还可在水下行走将来有望应用于水下探索。
目前,蟑螂机器人还处于实验室阶段,其重量仅有1.65g,四肢上分别设置有一个多功能脚垫,利用多功能脚垫,其可依靠液体表面张力在水面上游泳,甚至还能通过施加电压冲破水面,潜入水底。同时,该机器人可携带1.44g的有效载荷在水上浮动,以最高 10 赫兹的频率,在水面上进行快速摆动,还能追上预先放在水上的纸船。此外,该机器人整个机身覆盖特殊防水涂层,可避免在水下发生电路短路现象。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
仿生机器人
+关注
关注
1文章
70浏览量
15325
原文标题:哈佛大学研发新型蟑螂仿生机器人
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
机器视觉 欢创播报 马斯克展示机器人征服崎岖地形
1 马斯克展示机器人征服崎岖地形 12月10日,特斯拉发布了一段视频,展示人形机器人“擎天柱”在复杂地形上行走的最新进展。视频显示,机器人能够在有植被的山坡上

地下水位自动监测设备:守护地下水资源的科技哨兵
地下水位自动监测设备WX-DSW1作为现代水资源管理的重要工具,以其高精度、实时性和智能化特点,在地下水资源的保护、管理和合理利用中发挥着至关重要的作用。

下水道流量监测的重要性
下水道流量监测对于保障下水道系统的正常运行、提升城市防洪排涝能力、保障城市环境与居民健康以及促进智慧城市发展等方面具有重要作用。
电应普传感器 | 窖井水位监测超声波传感器应用方案
DYP-17超声波测距传感器是通过超声波探头发射出的超声脉冲,通过空气传播到水面上,经反射后再通过空气返回到超声波探头,通过计算超声波发射和接收的时间来判断水面与探头的实际距离。

基于地物光谱仪的水面溢油污染监测方法研究
为获得在特征波段内油膜厚度和光谱反射率之间的函数关系,在选择的野外环境下,用地物光谱仪进行了野外环境下的南湖光谱采集实验,进行了水面油膜光谱测量实验。实验结果证明了用地物光谱仪根据水面油膜光谱测量结果判别水面溢油油膜厚度的方法具

地下水在线监测预警系统解决方案
行业背景 随着工业化进程加速及人口激增带来的水资源需求持续增长,地下水资源开采过度的问题日益严重。这不仅导致了地下水资源枯竭,还引发了海水倒灌、咸水入侵、地面沉降等一系列生态灾害问题。同时,气候变化

河道水面漂浮物识别检测 YOLO算法
河道水面漂浮物识别检测根据监控摄像头搜集江河或河道的水面视频,截取图片中带有海上漂浮物的照片,河道水面漂浮物识别检测训练所需照片,形成数据实体模型,实时检测河道水面的监控画面。如出现数

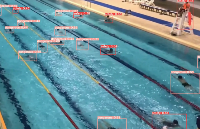
游泳溺水智能监测识别摄像机
游泳溺水智能监测识别摄像机是一项具有突破性意义的技术,为游泳场所的安全管理提供了全新的解决方案。这种摄像机结合了先进的人工智能和图像识别技术,能够实时监测游泳池中的情况,并在发现溺水事件时及时
北航成功研发微尺寸仿生机器人——昆虫机器人
据中央电视台报道,北京航空航天大学科研团队历经15年,成功研发出微尺寸仿生机器——“昆虫”机器人。这款机器人设计灵感源于蟑螂,外形如同硬币,重量与相应体型的昆虫相近,约200毫克。
地下水自动监测系统解决方案,实时掌握地下水变化并采取措施
鉴于地下水资源比地表水资源更为复杂,其本身质量和数量的变化,以及影响这些变化的环境因素和迁移规律,均难以直接观测。同时,由人类活动导致的地下水过度开采和水污染问题,往往会引发地面沉降和生态破坏等缓慢

振弦采集仪在地下水位监测中的可行性研究与实践
振弦采集仪在地下水位监测中的可行性研究与实践 地下水位的监测对于水资源管理和地下水环境保护具有重要意义。传统的地下水位监测方法主要包括井水位

地下水污厂配电系统电气安全设计
摘要: 随着城市化进程的不断加快,地下水污厂在城市建设中的作用越来越重要。然而,地下水污厂中存在着许多危险因素,如有害气体、液体和固体废物等,因此要保证电气安全。本文通过对地下水污厂电气安全
光量子行走的高效机器学习技术研究
基于神经网络技术,仅利用相对于传统态层析方法50%的测量基数目,即可实现平均保真度高达97.5%的开放光量子行走的完整混合量子态表征。
发表于 03-19 14:24
•250次阅读

才茂地下水动态监测系统方案,呵护地下“生命之源”
的影响,地下水面临着诸多问题,如水质恶化、水位下降、水污染地下水资源超采等。为了保护地下水资源和生态环境,开展地下水位监测工作至关重要。需求分析1.保护地
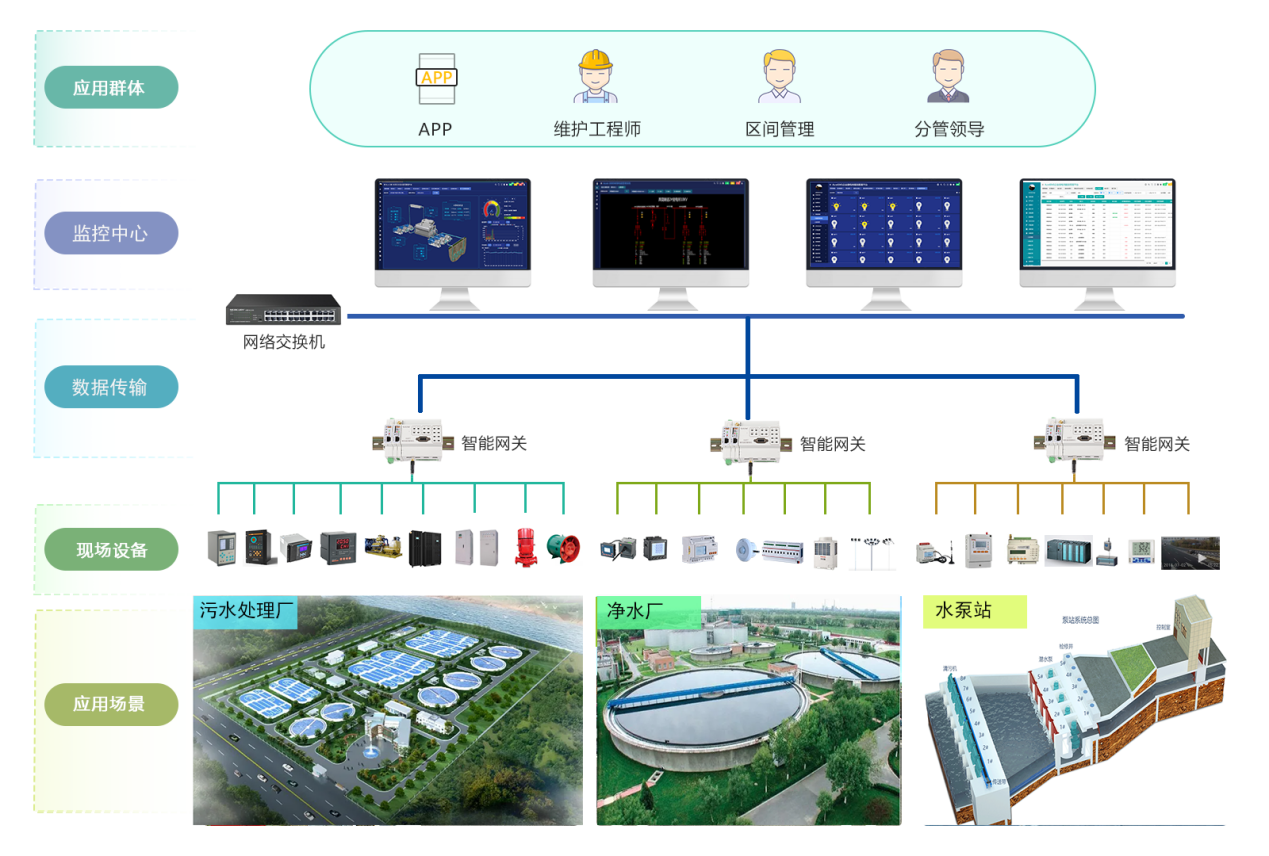
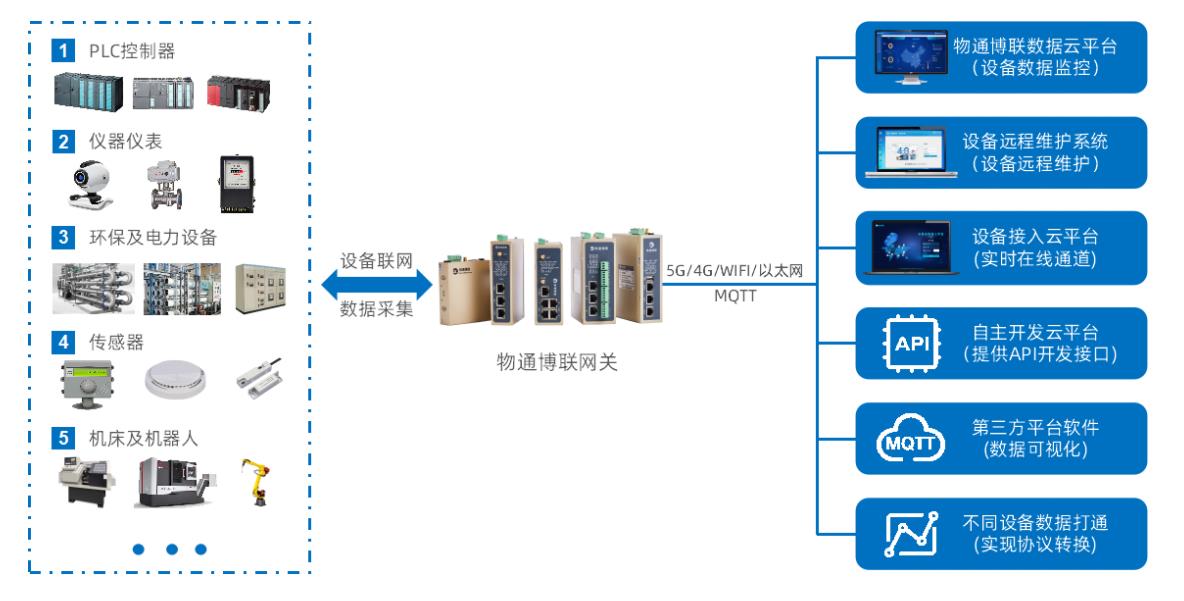
游泳池水质监测物联网解决方案
在炎炎夏日,游泳池成为人们消暑降温的绝佳去处。然而,游泳池的水质问题却一直备受关注。水质不好不仅会影响游泳者的身体健康,还会给游泳池的运营带来极大的困扰。对此,物通博联提供





 工商网监
工商网监
评论