 深入分析自动驾驶系统以及涉及到的软件系统
深入分析自动驾驶系统以及涉及到的软件系统

本文将深入分析自动驾驶系统以及涉及到的软件系统、硬件以及相关的企业的情况和产业的进展。
控制系统是智能汽车的大脑,它收集来自感知层的大量传感器的信息,将其处理分析,感知周围环境,规划驾驶线路;在车辆行驶时需要根据周边变化,控制执行层的设备对车辆进行相应的控制;
自动驾驶控制器需要接受、分析、处理的信号大量且复杂,从而为路径规划和驾驶决策提供支持的多域控制器将会是发展的趋势。
作为自动驾驶的主要参与方,车厂和互联网企业的策略有很大差异,前者的目标以量产销售为主,从L2及L3级别的自动驾驶逐渐升级是更具现实和经济性的策略。
整车厂方面,不少车厂都提出了自己的解决方案:从L2到L4,我们分别分析了Tesla的Autopilot、Audi的A8 AI和通用Cruise AV;
L2级系统解决方案已经普遍进入量产阶段:特斯拉Autopilot调整车道、驶出高速等,OTA更新能够帮助系统训练和迭代算法;
奥迪A8是市场上第一款具备L3级自动驾驶能力的量产车:中央控制器zFAS则是其自动驾驶的核心技术;
通用公布了2019年量产L4级自动驾驶汽车Cruise AV的计划:车内没有方向盘、制动和油门踏板。
对Google、百度这类互联网企业而言,自动驾驶是切入出行这个生活场景的重要机会,他们更倾向于以完全自动驾驶为目标构建系统平台。
Google的Waymo与少数整车厂和传感器厂商进行深度合作,凭借软件算法的领先优势取得了突破性的进展,并且将与整车厂合作开发定制化的车辆投入商业化运营;
百度依托Apollo平台,整合了多家产业链上下游的企业,旨在向合作伙伴提供一个开放、完整、安全的软件平台。
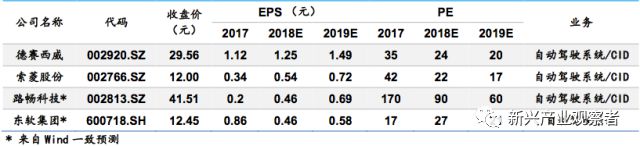
基于产业前景和潜在的巨大市场,给予行业买入评级,上市公司方面看好德赛西威、索菱股份,建议关注路畅科技、东软集团。
总论:决策层是自动驾驶的大脑
1.1 自动驾驶实现:决策层、感知层、执行层
自动驾驶系统可分为决策层、感知层、执行层,以及高精地图和车联网的支持。
决策层:依据获取的信息来进行决策判断,确定适当工作模型,制定相应控制策略,替代人类做出驾驶决策。
感知层:环境信息和车内信息的采集与处理。
执行层:指系统在做出决策后,替代人类对车辆进行控制,反馈到底层模块执行任务。
1.2 决策层的重要性:处理数据控制车辆的核心
自动驾驶系统将驾驶认知形式化,利用驾驶认知的数据表达语言,设计通用的自动驾驶软件架构。在这一架构中,决策层并不直接与传感器信息发生耦合,而是基于多传感器的感知信息、驾驶地图和车联网通信等信息综合形成的驾驶状态完成自主决策。
一方面决策层需要收集感知层的数据,分析勾画周边环境,定义驾驶场景,规划驾驶路线。
另一方面决策层需要控制执行层,按照规划的驾驶路线进行车辆动力、转向、制动的控制,并且预判路况做出相应的车辆控制。
1.3发展趋势:多域控制器
多域控制器MDC(Multi Domain Controller)是通过一块ECU,接入不同传感器的信号并进行对信号进行分析和处理,最终发出控制命令。MDC跟DCU(Domain Control Unit)域控制器类似,本质上是为了解决汽车ECU增多之后,汽车控制系统变得复杂,且能力达到上限的问题。
在自动驾驶领域,控制器需要接受、分析、处理的信号大量且复杂,多域控制是必然的发展趋势,如奥迪L3级别自动驾驶的中央控制器zFAS就是一个多域控制器。
MDC多域控制器
MDC平台本身的可扩展性,MDC所能够对接的传感器类型与数目并不固定,可以根据OEM的需求对应开发,尤其适应不同平台车辆自动驾驶系统的传感器配置;
能够将传感与处理分开,传感器与ECU不再是一一对应的关系,而是通过中央控制器MDC统一接受与处理信号,尤其对于OEM来说,可以根据需求更换传感器的类别与供应商。
1.4 相关公司
整车厂:商业化加速、方案逐渐成熟量产装车
2.1行业变革趋势:新车标配L3,L4/L5逐渐成熟
目前在ADAS基础上,L2到L3级别的自动驾驶将逐渐成为新车型的标配,产生大量新增需求,这是目前主要的投资机会;L4到L5的完全自动驾驶也在逐渐成熟中,一旦商业化将影响产业的未来。
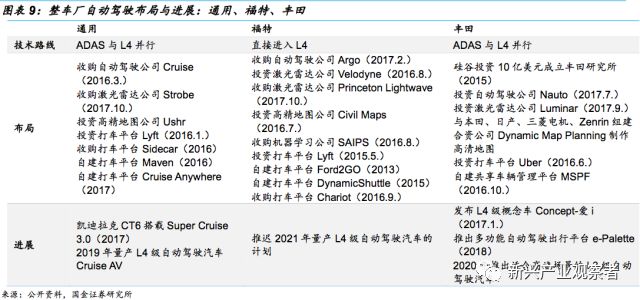
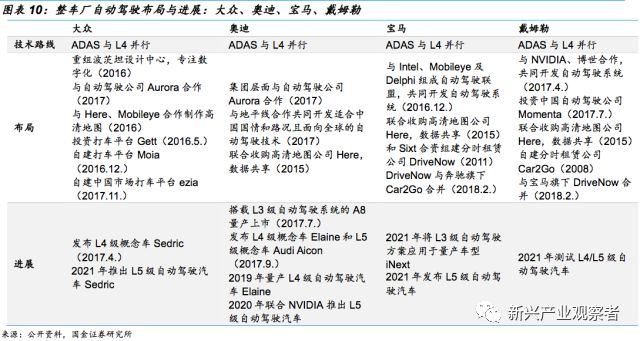
2.2 整车厂:积极布局、以最合理的方案量产装车为目标
从传统车厂来说,对待自动驾驶一方面更慎重,大家都承认自动驾驶会是未来,但发展自动驾驶的前提是不能影响现阶段的产品开发与销售;而另一方面各车厂都在积极布局自动驾驶,不断的收购公司,加强自身的开发实力,在自动驾驶相关的技术专利方面也是积累最深厚。
并且整车厂在开发的过程中,要平衡成本、时间和技术实现的关系,以最合理的方案量产装车为阶段性的目标。
各大传统整车厂在自动驾驶领域均有自己的研发团队,并且投入巨大,成果也在逐步显现,L2的系统解决方案已经普遍进入量产阶段,奥迪的zFAS系统则是市场上第一家量产装车的L3级解决方案,L4级方案也在开发中,甚至通用公布了2019年量产L4级自动驾驶汽车的计划。
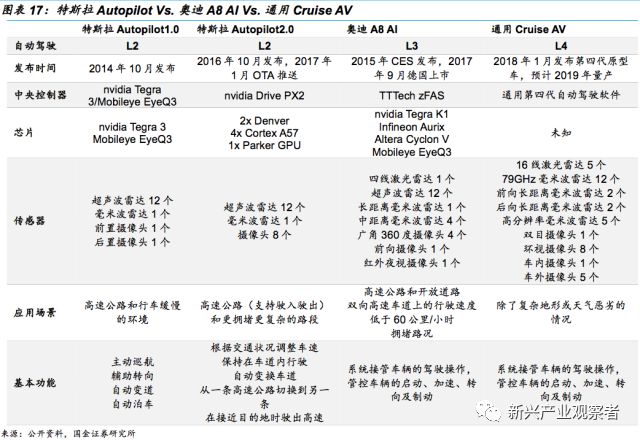
2.3 L2级方案:特斯拉Autopilot
特斯拉的方案类似于互联网公司及消费类产品的迭代方式,每一台特斯拉都会配置当时最新的硬件,然后通过OTA不断更新固件,获得更完善的驾驶辅助或自动驾驶功能。庞大的用户群可以源源不断地供给真实路况的驾驶数据,帮助Autopilot训练和迭代算法。目前Autopilot已经推出1.0和2.0版本。
Autopilot相当于L2级别的自动驾驶,能够根据交通状况调整车速;保持在车道内行驶;自动变换车道而无需驾驶员介入;从一条高速公路切换至另一条;在接近目的地时驶出高速;在接近停车场时自动泊车。
2.4 L3级方案:奥迪A8 AI
是市场上第一款具备L3级别自动驾驶能力的量产车,在某些特定情况下,如在停车和驶离、时速60公里以下行驶或交通拥堵时,该系统将接管奥迪A8的驾驶操控,而驾驶员则无需持续监控车辆的驾驶与运行。
整个自动驾驶系统由安全电脑、仪表盘、NMI用户交互导航系统、电子刹车助力Brake Boost、电子稳定系统ESC、电子转向控制EPS、发动机控制单元、变速箱控制单元、车身电脑、后轮转向系统、网关Gateway、电子悬挂控制平台EEP和中央自动驾驶控制器zFAS组成。
中央控制器zFAS则是其自动驾驶的核心技术,随着多代的演进,终于zFAS从巨大的原型机变成了小型化和适应汽车要求的模样。zFAS,是德语zentrales Fahrerassistenz-Steuergeraet的缩写,其构造包括前方图像处理单元、全景图像处理单元、传感器融合主控单元和应用主控单元四部分。
zFAS由奥迪和德尔福、英伟达、TTTech、Mobileye合作而来,德尔福提供硬件,TTTech提供软件支持(能够达到车规ISO26262 ASIL D的最高安全等级),英伟达提供GPU,Mobileye提供视觉芯片,核心处理器包括:
Nvidia的Tegra K1包含192颗GPU,用于做4路环视图像处理
Infineon的Aurix多核微控制器用于提供安全服务,满足诸如ISO 26262这样的安全标准
Altera的Cyclone 5,用于基于FPGA技术高速处理信号融合,括障碍物、地图的融合及各种传感器的预处理工作
Mobileye的EyeQ3由于是封闭的芯片,用于进行视觉信号处理
2.5 L4级方案:通用Cruise AV
2018年1月11日,通用联合Cruise Automation对外公布了其第四代无人驾驶汽车概念原型,这款车称为Cruise AV,由Bolt EV改装而来,里面没有方向盘、制动和油门踏板。
通用希望在2019年,就能够将这款车型投入到它们的共享出行车队使用。但在此之前,它们需要征得美国政府的同意。另外,还有7个州也需要单独申请。
传感层配置5个激光雷达、21个毫米波雷达和16个摄像头:
5个激光雷达:Velodyne的VLP16 16线激光雷达;
21个毫米波雷达:12个79GHz毫米波雷达由日本ALPS提供,2个前向2个后向长距离毫米波雷达推测由德国大陆提供,型号可能是ARS-408;5个高分辨率毫米波雷达由德国博世提供,主要是车两侧和正前方。
16个摄像头:车顶10个,包括一个基线长大约8厘米的双目摄像头,8个360度环视摄像头,摄像头周围均有红外LED,可以在低照度甚至黑夜下工作。车内后视镜位置有一个非无人驾驶版Bolt的单目摄像头,车辆最前部位置有一个长距离单目摄像头。车外后视镜和车后部各两个摄像头。
2.6 特斯拉Autopilot Vs. 奥迪A8 AI Vs. 通用Cruise AV
科技公司:自动驾驶的开拓者、未来出行的颠覆者
从科技公司的角度出发,他们对待自动驾驶的态度更积极,凭借在软件算法层面的领先优势,科技公司很早就进入到了自动驾驶的开发与测试中,是早期的开拓者;并且科技公司与整车厂合作开发定制化的车辆快速投入商业化运营,也将是未来出行的颠覆者。
一方面这些科技公司在自动驾驶领域取得了突破性的进展,在与整车厂合作的同时,还保持自身的独立性,维持了科技公司高效的执行力与开发速度。
另一方面,大资本进入这个行业,势必将极大促进无人驾驶产业的发展,同时竞争也会更进激烈。
3.1 Waymo
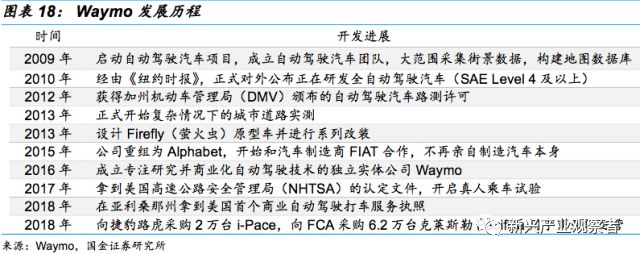
谷歌母公司Alphabet旗下独立的专注自动驾驶系统开发的子公司。谷歌自2009年起启动自动驾驶项目,2016年成立独立实体Waymo。
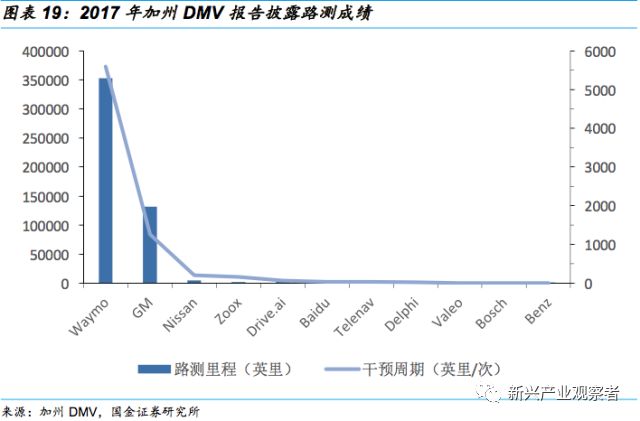
2017年加州DMV(california department of motor vehicles)自动驾驶报告披露的数据显示,Waymo的车队规模、路测里程和人工干预周期上均保持领先,真实路测里程2017年达到350万英里,目前超过500万英里,模拟路测里程超过25亿英里,在加州开放公路测试里程352,545英里,特别是人工干预周期,达到5596英里/次,第二名的GM为1254英里。通过报告可以看到,车队规模大,路测里程越长,干预周期越长。因此自动驾驶系统研发也是一个需要较大财力、时间投入的工程。
根据Waymo安全报告披露,公司自动驾驶车辆通过四个步骤来完成:
“我在哪”:提前描绘目标区域的高清3D地图
“我周围有什么”:通过传感器感知周边环境
“下面会发生什么”:处理环境信息,预测周边环境变化情况
“我应该怎么做”:规划路线,车辆执行
在与克莱斯勒合作的车型中,一辆车装有5个激光雷达,分别为前部3个,顶部1个和尾部1个;毫米波雷达4个,前后部各2个;摄像头1个,位于顶部;其他补充传感器1个,位于顶部。由于是测试车辆,安装传感器数量较多,配置冗余比较充分,成本也较高。
总体看Waymo是综合实力最强的自动驾驶公司,路测车队规模、路测里程都位于前列,并且路测成绩较好,平均5596英里才需要一次人工干预。目前Waymo已经开始在美国亚利桑那州进行无人车的载客试运营,之前还大规模向捷豹路虎订购了 2 万台 I-PACE 纯电动车,以及向向FCA采购6.2万台克莱斯勒Pacifica,准备投入正式的自动驾驶商业化运营。
3.2 百度Apollo
2017年4月发布Apollo计划,在百度内部把车联网、L3、L4各部门整合在一起加强了竞争力,在外部充当了中国自动驾驶的旗手,召集起一个大联盟,把车企和供应商都囊括进来,一方面加强联盟内的合作,另一方面寻求与政府合作、吸收外部资金。
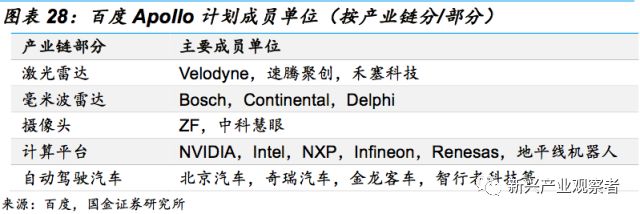
Apollo平台是一套完整的软硬件和服务系统,包括车辆平台、硬件平台、软件平台、云端数据服务等四大部分。旨在向汽车行业及自动驾驶领域的合作伙伴提供一个开放、完整、安全的软件平台,帮助他们结合车辆和硬件系统,快速搭建一套属于自己的完整的自动驾驶系统。
硬件层面:
计算中心:Neousys Nuvo-6108GC,x86架构的工业控制计算机;
CAN通信卡:ESD CAN-PCIe/402-B4,与汽车执行层进行信号通信;
GPU和IMU:NovAtel SPAN-IGM-A1或者NovAtel SPAN ProPak6 和NovAtel IMU-IGM-A1,进行GPS定位和惯性定位;
激光雷达:Velodyne HDL-64E S3,扫描距离达到120米,水平360度扫描,垂直FOV26.9度;
毫米波雷达:大陆集团的ARS408-21,车辆前端探测;
摄像头:Leopard Imaging LI-USB30-AR023ZWDR。
软件层面:Ubuntu Linux 推荐版本14.04,包含通用模块、控制模块、数据模块、校准模块、通信模块、驱动模块、深度学习模块、定位模块、监测模块、感知模块、预测模块、路径规划模块等等。
整体工作流程大致是:路径规划模块根据目的地位置计算出具体的导航信息,激光雷达、毫米波雷达和摄像头拍摄到的数据配合高精度地图由感知模块计算出3D障碍物信息并识别交通标志及交通信号,经由预测模块计算出障碍物的可能轨迹,并根据车辆定位模块配合计划模块得到车辆应该走的具体车道;在执行过程中,车辆控制模块结合车辆的当前状态计算加速、刹车和方向的操作信号,输出到车内,实现了车辆的自动驾驶。
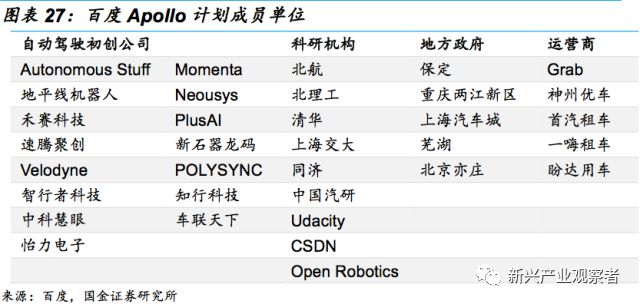
百度Apollo计划以“开放”和“联盟”为特色,自计划宣布以来已有近百家整车厂、Tier1、Tier2、科研机构、运营商等成为盟友,也包括北京、上海、重庆、福建平潭等地方政府。
就在一周前,百度 Apollo 和重庆力帆集团旗下分时租赁平台盼达用车、重庆两江新区合作,在两江新区互联网产业园开启了为期 1 个月的自动驾驶共享汽车试运营。
与金龙客车合作的小巴“阿波龙”,预计2018年量产,在国内自动驾驶系统研发上保持领先。

3.3 Waymo小联盟 Vs. 百度Apollo大联盟
通过上述分析我们看到,Waymo走的是“小联盟”战略,与少数整车厂(克莱斯勒、捷豹、本田等)和传感器厂商进行深度合作。它具有先发优势,积累较多路测里程和较大车队规模,路测成绩也较好。而百度走的是“大联盟”的战略,依托Apollo平台,尽可能地扩大“朋友圈”。但除数据共享外尚未看到成熟的合作模式。
3.4 安全策略:Waymo逐步进化 Vs. Mobileye不造成事故
3.4.1 Waymo
之所以将Waymo的安全策略称为“逐步进化”与其自动驾驶战略和强调逐步接近真实世界的测试有关。
在自动驾驶战略上,Waymo坚持“创造一个好的驾驶员”为目标,坚持直接L4级别的自动驾驶研发,目标是待技术成熟就能直接替代驾驶员。这与它互联网公司的本质有关,首先它不是个硬件公司,所以2015年以后它放弃了自主研发汽车,转而与FCA等公司合作。此外,虽然它现在使用的激光雷达等硬件设备是自研的,但也没有单独向外出售的动作,大量的资源还是用在自动驾驶系统的研发上。当然,作为谷歌母公司Alphabet旗下公司,一个最大的优势是母公司资金实力雄厚,可以支撑巨大的研发费用而不需要提前自主产生利润。
以自动驾驶软件为例说明Waymo严格的测试程序
1、模拟测试:
在模拟中,严格进行测试软件的更新,然后将其部署到模型中,模拟车辆在公共道路上遇到的最具挑战性的情况,并将其转化为虚拟场景,供我们的自动驾驶车软件在模拟中练习:
2、封闭道路测试:
Waymo在加利福尼亚州设立了一个91英亩的封闭道路测试园区,包括高速公路,郊区车道和铁路道口等所有设施。团队使用园区对软件进行验证,并对具有挑战性或罕见的场景进行阶段性分析。
3、公共道路驾驶:
测试提供了一个连续的反馈循环,即工程师观察现实情况,对软件进行调整以优化驾驶,然后进行更新,持续地完善系统。这种迭代方法有助于扩大运营设计领域和车辆功能,并且安全地扩展我们的能力,使车辆能够安全地在L4级别运行。
3.4.2 Mobileye
Mobileye对自动驾驶的安全策略与Waymo有很大的不同,因为本质上它是个硬件公司,商业模式是“卖硬件”,这使得他们的安全策略不可能像Waymo那样坚持面面俱到,大量测试。其安全策略可以表述为,以较强的理论模型(即RSS模型)“塑造”一个真实世界的映射,以此为基础制定一系列的满足“不制造事故(区别于不涉及事故)”的条件,从而尽量减少测试所花的时间和资源。
多方安全的责任敏感安全(RSS)模型
RSS模型将安全驾驶的基本原则转化成机器可以理解的数学公式。例如,尾随其他车或变道时的安全距离、道路优先权和障碍物避让等。如果AI系统发出的指令违反了任何一条基本原则,RSS将拒绝该指令。
绝对安全是不可能的,引入“事故责任”的概念,即RSS的前提是,虽然自动驾驶汽车可能涉及事故,但绝不会造成事故。主要包括以下四条规则:
1. 保持与您前方车辆的安全距离,以便在突然刹车时您能够及时停下来;
2. 保持与您侧方车辆的安全距离,并且在执行侧向操纵和切入另一辆车的轨迹时,必须让其他车有足够的空间来回应;
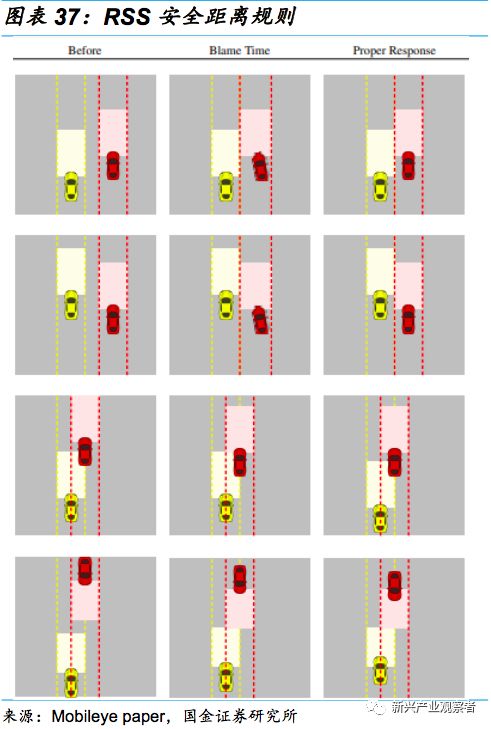
3. 应该尊重“道路权”规则,但“道路权”是给予的,不是靠“争取”的;
4. 小心盲区,例如,一个小孩可能会被挡在停放的汽车后面。
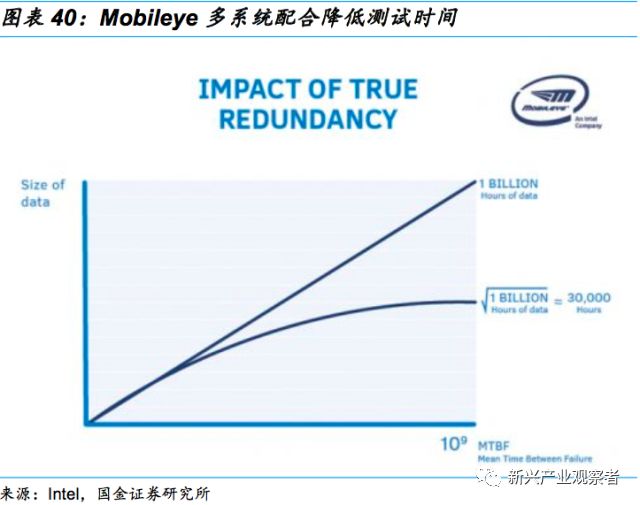
总结:Mobileye的安全策略可以用“不造成事故”和“多系统配合”总结,即通过理论模型塑造一个不造成事故的规则,使得即使发生事故,自动驾驶车辆也不是负责人。此外,还通过两套相对独立的系统配合,独立发现产生问题的场景,并配合解决问题,形成大幅缩短测试时间的效果。这是Mobileye作为硬件厂商没有太多资源和时间进行大范围测试条件下的策略,同样也是由于开始测试时间较晚,相对Waymo有劣势情况下的选择。
3.4.3 Waymo Vs. Mobileye

-
传感器
+关注
关注
2578文章
55777浏览量
795111 -
软件系统
+关注
关注
0文章
70浏览量
9852 -
自动驾驶
+关注
关注
795文章
15048浏览量
181957
原文标题:自动驾驶系统:量产导向还是性能导向
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
FPGA在自动驾驶领域有哪些应用?
自动驾驶真的会来吗?
自动驾驶的到来
UWB主动定位系统在自动驾驶中的应用实践
如何让自动驾驶更加安全?
自动驾驶汽车的处理能力怎么样?
自动驾驶技术的实现
详细说明多项自动驾驶底层软件技术
对自动驾驶软件产业进行的深入分析
自动驾驶技术涉及到的AI科技





评论