 微控制器中的固件实现无人机电机功能
微控制器中的固件实现无人机电机功能
到 2050 年,全球人口可能接近 100 亿。联合国粮食及农业组织 (UN FAO) 2017 粮食及农业未来报告指出,农业产量需增产 50% 才可提供充足的粮食。
联合国粮食及农业组织指出了若干亟待解决的粮食增产挑战。包括促进农村繁荣发展、完善粮食体系以及提高农业生产力。而先进技术对于应对这些挑战起到重要作用。智能农业的出现有利于作物产量和家畜管理的改善。例如使用物联网 (IoT) 技术可以提高作物产能和家畜健康水平。
收集作物高度、植物密度、叶片状况或牲畜体温等数据帮助农场主、农业生产者优化植物或动物管理,以及预测和最大化产量。经过数据分析后,农场主需要一些有效措施,从而能够根据所收集信息快速做出决策。但主要问题是农场规模可能极其庞大,蔓延数千英亩。这时,作物或牲畜的检查工作会十分耗时。此外,还难以全面了解作物或动物的健康状况,不容易发现特定区域的局部种植密度不足、干旱或虫害问题。
而无人机能够胜任这些工作。技术公司正在寻找方法,让农场主能够使用无人机快速调查大面积区域,收集可见和非可见波长下的深度信息(图 1)。无人飞行器 (UAV) 正推动着精准农业的形成,同时也为专家们带了开发云分析工具的机遇,该工具旨在分析 UAV 飞行期间收集的数据,以供做出适当的响应。无人机通过优化灌溉、施肥或虫害控制帮助农场主提高产量,并通过更高效利用化肥降低成本。
图 1: 航拍影像的云分析可以检测作物和土壤状况。(图片来源: PrecisionHawk)。
农用 UAV 并不局限于收集数据。具有 10 kg、20 kg 或更高有效载荷的多转子 UAV 比使用拖拉机或轻型飞机的传统农药喷洒方式具有更多优势。培训 UAV 驾驶员比培训飞行员的时间要短且费用低,而且就购买和操作飞行器本身而言费用也相对较低。与使用拖拉机相比,喷洒农药的 UAV 速度更快且不会损害作物。此外,即使连日下雨造成地面积水的情况下,无人机仍可完成作业。
用于精准农业的 UAV 技术
UAV 进入精准农业市场的时间很短且正处于发展期,相关法规还未最终敲定。尽管美国联邦航空管理局 (FAA) 批准个人使用 UAV,但目前禁止用于商用。
就 UAV 技术而言,一架合格的飞行器需要基本的电机和飞行控制、传感器、遥测技术以及用于喷洒农药的阀致动器和液位检测等系统。还建议安装基于雷达的防撞装置。
轻型低功耗高光谱传感器收集的数据相比于传统可见光谱摄像机可为农场主提供更多作物状况信息。高光谱传感器起源于首先在卫星应用中得以验证的高光谱技术。使用一系列检测器在超出可见光谱的波长下采集数据,各检测器经过调节后在超近红外(VNIR,380 至 1000 nm)、近红外(NIR,900 至 1700 nm)或短波长红外(SWIR,950 至 2500 nm)等窄波段内工作。在这种波长下比单独的可见光谱更能清晰地观察到作物病害的化学特征或其他虫害。现已面市的高光谱传感器价格实惠,具有低失真、宽视场和板载处理功能,可以消除噪音并确保采集图片的准确性。
实现飞行
用于精准农业的 UAV 种类多样,从小型固定翼飞机到多转子四轴无人机型平台。用于喷洒农药的 UAV 可能包含六个或更多转子以提供充足升力,具体取决于预期的有效载荷。
无人机型 UAV 通常采用有刷或无刷直流 (BLDC) 电机驱动抬升旋翼。小型飞行器采用有刷电机以实现轻质简易的特性,而要求高可靠性和低电磁噪声的 UAV 更倾向于使用 BLDC,特别是大型 UAV。
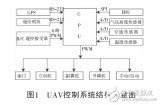
飞行器的核心部件是飞行控制器,用于处理导航、控制电机完成起飞以及在飞行中保持高度和航向。GPS 导航与轻型小型 MEMS 传感器(例如 3 轴加速度计、3 轴陀螺仪和气压传感器)相结合,可实现准确定位、运动控制和高度感知。就保证飞行稳定性而言,模型直升机控制器通过控制反扭矩尾桨来防止机身沿着自身轴线旋转,与现今的多转子 UAV 飞行控制器具有相似的原理。在 UAV 控制器中,基于 MEMS 传感器融合的惯性测量功能可以调整每个电机的速度,确保飞行器按规定方向飞行。
作为精准农业辅助工具,飞行控制器的真正作用体现在用户接口和特性方面,可以帮助确定 UAV 飞行路线。农场主需预先准确地确定 UAV 飞行路径,以便获取特定区域的完整图片,或确保以最省时省力的方式全面药物喷洒,且尽可能避免过喷情况。
加速电机控制开发
为简化电机驱动的开发,众多制造商提供了多种评估套件。控制算法通常免费提供,例如使用霍尔传感器或反电动势测量来检测转子位置的磁场定向控制 (FOC) 等。这些套件可通过提供示例软件,帮助工程师们在应用开发方面取得有利的开端,让其能够快速顺利地开发各类电机。
然而,即使可以借助这些套件,工程师们仍需掌握使用电机进行设计的专业知识,才能精准地控制速度与扭矩。挑战在于为特定电机设置软件,然后还需要微调参数以优化对速度和扭矩指令的响应。工程师需要算出电机的恒压 (Ke)、摩擦系数和惯性矩。如果控制器依赖于反电动势测量,需设置无传感器状态观察和速度调节。最近,TI 和 STMicroelectronics 等供应商已成功简化电机的特征化和调谐,因此开发人员无需事先了解电机特性便可驱动电机。两家制造商的方案略有不同。
ST 在 MC 工作台电机控制开发环境中创建识别和调谐功能(图 2)。电机分析器通过静态开环和闭环测试自动检测电机参数,每次只需几秒钟即可完成。其他功率级、驱动和控制级参数通过 MC 工作台 GUI 输入。然后生成并编译项目,让电机开始转动且受控。届时 MC 工作台一触式调谐功能可以简单直接地调整设置,保证速度和扭矩控制平稳。
图 2: ST MC 工作台辅助设置。电机分析器工具可以采集未知电机参数。
通过实施 MC 工作台中的此功能,开发人员具有多种微控制器选择,如种类繁多的 STM32 MCU,还可以利用 STM32 生态系统创建低成本的开发平台。最近,ST 推出了采用不同方案的 STSPIN32F0。它将整个 STM32F0 微控制器和三相半桥栅极驱动器集成在同一封装之中,具有过流/过压/超温保护以及一组用于霍尔传感器解码的运算放大器。STEVAL-SPIN3201 评估板将 STSPIN32F0 IC 与电源管理功能相结合,将与 STSW-STM32100 电机控制资源库配合使用。下载 STSW-SPIN3201 固件示例并结合 MC 工作台,快速实现电机驱动以及启动开发工作。
TI 的方案基于将其 InstaSPIN™-MOTION 软件解决方案嵌入到微控制器(如 TMS320F28069M 等 C2000 Piccolo™ 系列器件)的 ROM 中。InstaSPIN-MOTION 包括 TI 的 FAST™(磁通量、角度、速度、扭矩)基于软件的转子磁通传感器。还包括用于电机分析、单个参数调谐和干扰源抑制的元器件,可以确定电机类型(图 3)。

图 3: TI InstaSPIN-MOTION 采用嵌入在微控制器中的固件实现电机功能。
开发人员可以在 TI MotorWare™ 软件环境中使用 InstaSPIN-MOTION 功能。DRV8312-69M-KIT 将包含 TMS320F28069M 的控制板与包含 DRV8312 IC 的电源模块基板相结合,DRV8312 IC 是一款包含驱动无刷直流电机所需电路的三相整合逆变器。还提供 55 W 电机。
总结
精准农业还为无人机技术带来了另一激动人心的机会。采用高效经济的方式优化产量势在必行,这将促进行业蓬勃发展。使用软件来简化飞行编程并分析采集数据以及利用现有电机控制专业技术快速创建稳定可控机身,必将是成功的关键。
-
电机控制
+关注
关注
3534文章
1877浏览量
268794 -
电源模块
+关注
关注
32文章
1704浏览量
92844 -
无人机
+关注
关注
230文章
10435浏览量
180357 -
drv8312
+关注
关注
0文章
3浏览量
7523
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论