 机智云Gokit3.X源代码分析之串口接收数据这块的机制
机智云Gokit3.X源代码分析之串口接收数据这块的机制
昨天分享了整个程序的架构,今天重点分析一下串口接收数据这块的机制
我们知道,通过串口接收数据一般有3中方式,轮询、中断以及DMA。轮询模式为堵塞模式,必须要定时去查询收到的数据;中断模式为非堵塞模式,也是平时用的比较多的,但每次只能接收一个字节;还有一个比较好的方法那就是用串口的空闲中断+DMA实现串口数据的接收,在接收一帧数据只需要中断一次,这样就可以接收不定长数据了。机智云这里采用的方式2,即常规的中断方式。
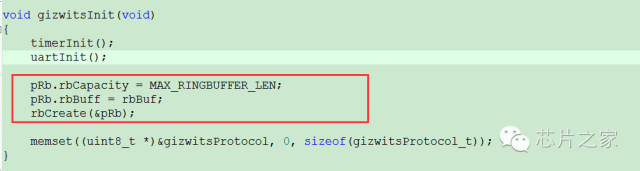
数据通讯采用的串口2,引脚为GPIO2和GPIO3,在gizwitsInit()中进行初始化
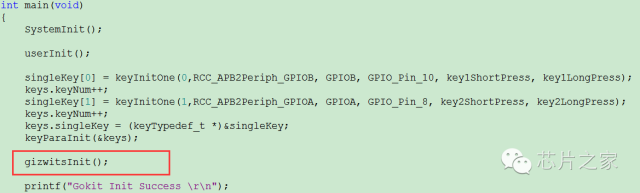
我们进去看看
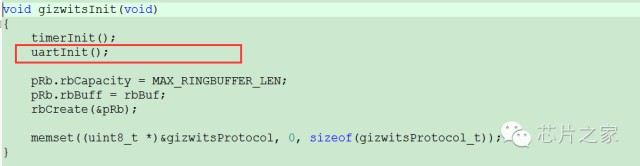
上图主要初始化了一些硬件接口,并开启中断,这也是我们一般的写法,再往下看,看到一个pRb的结构体,这是个什么呢,我们追踪下,下面是pRb的定义
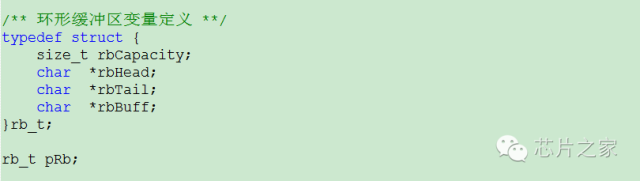
我们先来解释下环形缓冲区的原理:
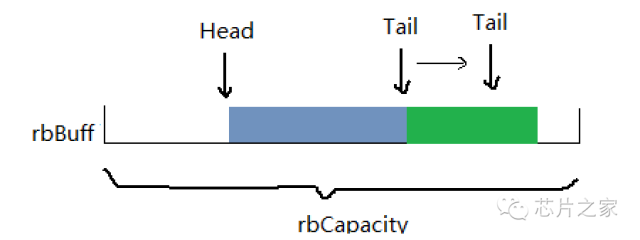
环形缓冲区通常有一个读指针和一个写指针。读指针指向环形缓冲区中可读的数据,写指针指向环形缓冲区中可写的缓冲区。通过移动读指针和写指针就可以实现缓冲区的数据读取和写入。在通常情况下,环形缓冲区的读用户仅仅会影响读指针,而写用户仅仅会影响写指针。
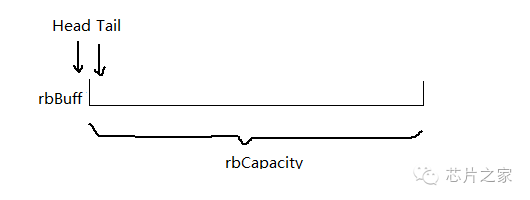
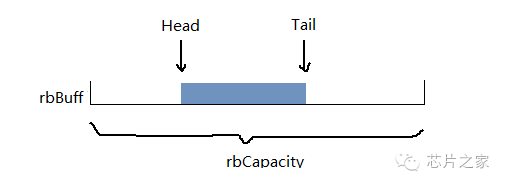
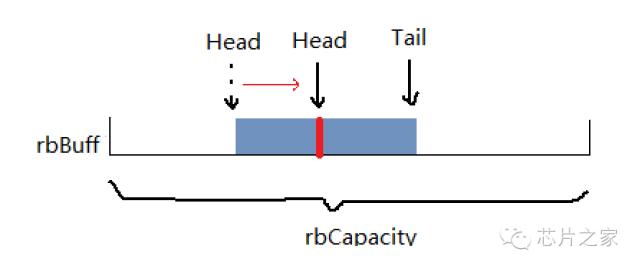
这里的rbCapacity代表缓冲区的容量,head指向了读区域,tail指向了写区域,rbBuff指向缓冲区的入口地址,示意图入下
明白了结构体的定义,我们接着往下看
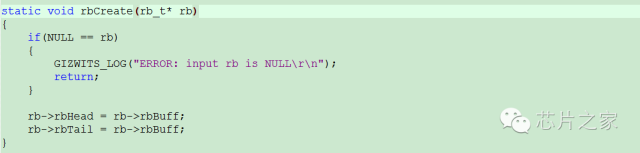
rbCreate(),顾名思义,此函数的作用用于创建缓冲区,将缓冲区的head/Tail都指向缓冲区的首地址,那么rbCapacity和rbBuff在哪里赋值的呢?我们返回去看gizwitsInit();
看到这里我们就明白了,继续往下看
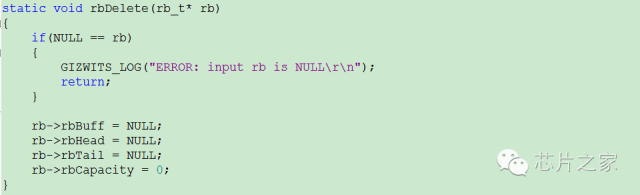
这个函数为删除缓冲区函数,将结构体里面的数据全部清零
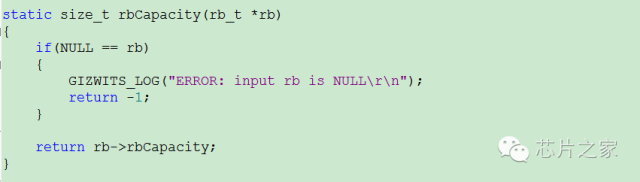
这个函数为获取缓冲区的总容量,很好理解
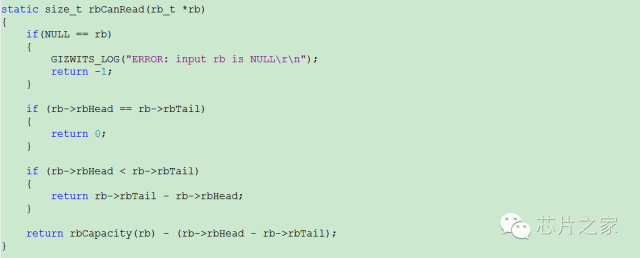
接下来这个函数为缓冲区有多少数据可以读,有三种情况:
1、Head和Tail都指向同一个地址,可读大小为0,返回0,这种情况只会出现在缓冲区还没有数据的时候,使用之后就不会出现头尾重合的现象;
2、Head
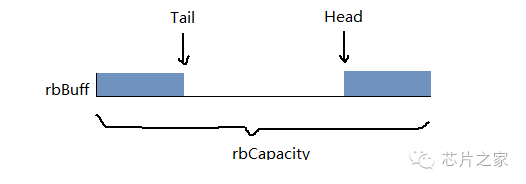
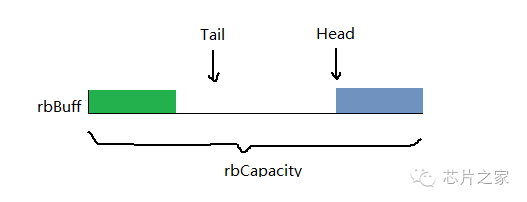
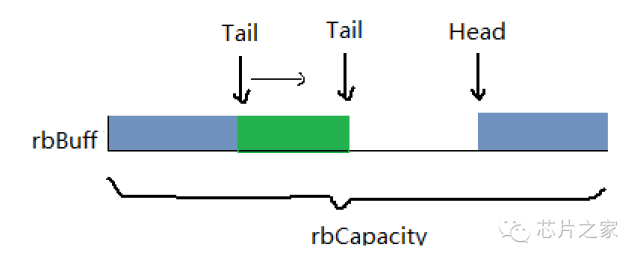
3、Head>Tail,如下图所示,缓冲区已经写满,并且从开头处重新写了数据,可读部分为蓝灰色区域(rb_capacity(rb) - (rb->rb_head - rb->rb_tail));
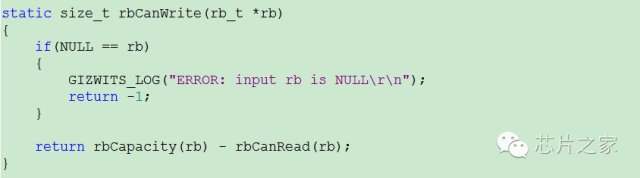
接下来的函数为可写区域大小,直接用总容量rb_capacity(rb)减去可读区域大小就好了。
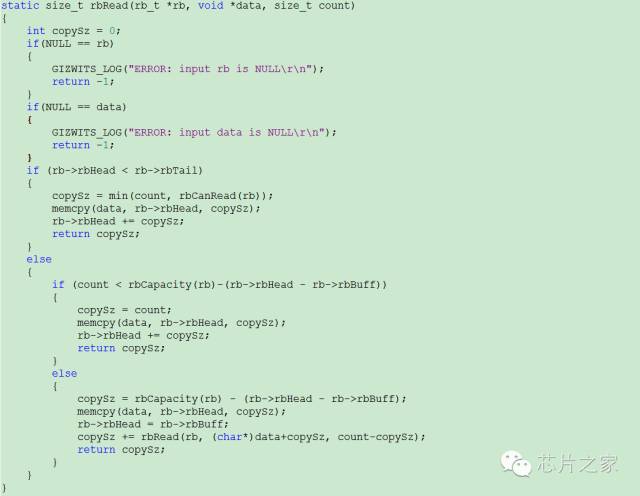
然后是读数据函数,从Head处开始读,读取count个数据,放到data地址开始的数据区域,如下图所示,也是分为三种情况
1、Head
2、Head>Tail,且count中的数据小于从Head到缓冲区尾部的个数,即小于下图中的蓝灰色,与第一种情况一样,直接复制相应内存,之后修改Head指针即可。
3、Head>Tail,且count中的数据大于从Head到缓冲区尾部的个数,即大于下图中的看灰色,这种情况我们就先把Head到缓冲区尾部的数据复制到data处,再把绿色区域的复制过去,这里绿色部分并不会超过Tail,写操作中做了限制。
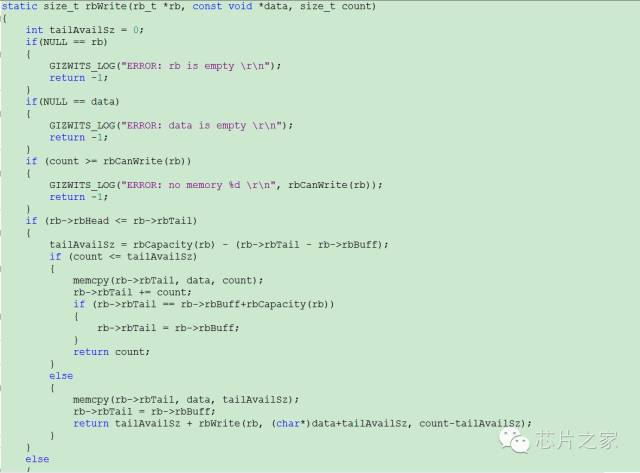
最后是写数据函数,把从data指向的地址,写到Tail指向的地址,写count个数据,返回成功写入的个数,在这里判断了要写入的数据大小要小于可写区域大小,防止数据覆盖,如下图所示,也是分为三种情况
1、Head
2、Head
3、Head>Tail,这个因为已经做了数据合法判断,所以直接复制数据就行。如下图所示
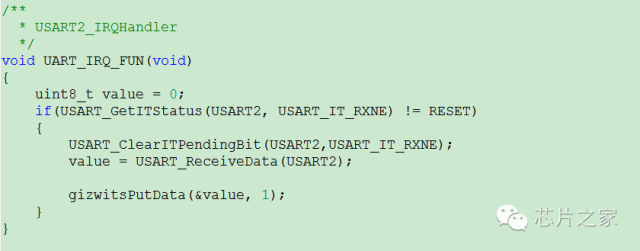
那么明白了串口环形buff的机制,数据是从哪里进入的呢,我们找到串口中断的入口,
可以看到中断程序非常简单,中断之后直接往缓冲区丢一个数据就行了,采用这种数据结构,大大提高了程序的稳定性,同时操作起数据来也很方便,需要的时候直接去读缓冲区数据就好了。今天就先分享这么多,下期分享机智云的协议与结构体的定义,谢谢大家!

-
串口
+关注
关注
14文章
1557浏览量
76709 -
源代码
+关注
关注
96文章
2946浏览量
66825 -
机智云
+关注
关注
2文章
590浏览量
26440
原文标题:Gokit3.0 STM32源代码分析之二
文章出处:【微信号:IoTMaker,微信公众号:机智云开发者】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论