 扫地机直流无刷电机设计方案
扫地机直流无刷电机设计方案
扫地机器人将激动机器人技术和吸尘器技术有机地融合起来,实现室内环境(地面)的半自动或者全自动清洁,替代传统繁重的共清洁工作,近年来已受到国内外的研究人员重视。作为智能移动机器人的一个特殊应用,从技术方面讲,智能化自王式吸尘器比较具体地体现了移动机器人的多项关键技术,具有较强的代表性。市场前景角度讲,自主吸尘器将大大降低劳动强度、提高劳动效率,适用于家庭和公共场馆的室内清洁。因此,开发自主智能吸尘器既有科研上的挑战性,有具有广阔的市场前景。融合现代传感器及机器人领域的关键技术。代替传统的家庭人工清扫方式,是家庭生活电器化、智能化、是科技更好的为人类服务。
怎样实现扫地机器人自动避障呢?关键在于传感器系统,扫地机传感器系统的性能越好,自动避障和路径规划方案就越容易实现,控制系统的程序就更加容易。扫地机的整体性能也就越好。
测速装置模块
测速信号通过在电机的转子上加装黑白条纹的圆盘,在利用光电开关得到电机每转一圈产生若干个脉冲信号,据此可以算出电机的实际转速。这种简易的光电开关测速发成本低,性能可靠,可以在电机转速不高,精度没有那么严格的要求的情况下使用,这种测试装置可以构成里程计。根据里程计的返回脉冲数可以计算出电机行走的距离,并简介得到行走速度。
碰撞测试
碰撞检测采用霍尔元件,芯片的供电电压范围为4.5~18V,敏感度高,阻抗低,工作的最大输出电流为15ma,当芯片的正上方有S极磁场时,霍尔元件输出高电平,当元件偏离磁场后,元件输出低电平。通过控制霍尔元件正上面的磁场极性,可以控制元件输出信号的变化趋势。当极性相反时,元件在偏离磁场时为高电平,正对磁场时为低电平。
驱动系统
驱动器就是驱动扫地机动力部件,最常用的就是电机。扫地机最主要的控制量为控制扫地机的移动,扫地机驱动器重的最根本的问题就是控制电机,控制电机转的圈数就可以控制扫地机移动的距离和方向,扫地机械的完全程度或者移动距离等。所以,第一要解决的问题就是如何让电机根据自己的意图转动。一般有赚的控制卡和控制芯片来警醒调控。有了这些控制卡和芯片,然后微控制器与其来凝结起来就可以用程序来控制电机。第二问题是控制电机的速度,在扫地机上的实际表现就是他的实际运动速度,扫地机走的快慢全靠电机的转速,这样要求控制卡对电机的速度控制。
机器人的工作电机分为行走、吸尘和毛刷电机。机械人行走结构中前面有一个从动转向轮,两侧各有一个驱动轮,有无刷直流电机进行控制。清扫结构主要使用真空吸尘器和有电机带动的旋转毛刷。
无刷直流电机具有效率高、功率大、体积小、控制精度高等明显特点在机械人的领域有着广泛应用。直流无刷电机具有良好的调速性能,由它采用电子换向,脉宽调制脉冲调速,在进一步提高直流电机的性能同时,有克服直流电机传统机械换向带来的一系列问题,从而大大延长了电机的使用寿命
直流无刷电机控制的电路主要有控制电路微处理器、数据信号处理器和专用集成电机等方式。使用单片机辅以外围处理电路的方法,其测频,换相、控制调节等均由软件实现。采用单片及软件编程的方法控制直流无刷电机。吸尘器内的风机和带动毛刷的电机都使用直流电机,由于不需要调速,换向。因此控制方法比较简单。
电机的运动系统结构决定机器人的运动空间,采用轮式结构,其中左右轮为主动轮,需要可调速的电机控制,前面的转向轮为从动轮,便于机器人的转向
直流电机具有良好的线性调速特性、简单的控制性能、较高的效率、良好的动态特性,所以一直占据着调速控制的传统地位。虽然近来不断受到其他电动机如交流变频电动机、步进电机的挑战,但直流电动机仍然许多调速控制电动机的最优选择,在生产,生活中仍有着广泛应用
直流无刷电机简称BLDC,学名为无换向电机或者无整流子电机,是一种新型的无极变速电机。它具有直流电机的良好调速特性,但由于没有换向器,因而可做成无接触式,具有结构简单,制造方便,不需经常维护等优点,是一种理想的变速电机。
如何选择一款直流无刷电机呢?看看以下的换算公式:
已知整个扫地机中零件的重量,我们取总重量为10kg,范围为50mm-200mm,动力轮转速为1-2r/min.即:
G=mg=10X10=100N
V等于IIDn=3.14X0.01X40=1.75mm/s
具体的扫地机直流无刷电机设计计算如下:
N=G*W/η=0.18(KW)
G—扫地机直流无刷电机的负载
η—传动效率,取0.75
所以根据N=0.10kw,n=1500r/min,即可得出扫地机直流无刷电机的结构。
扫地机直流无刷齿轮的设计计算:
1,、初步计算
(1) 材料选择
因传动尺寸无严格限制,批量较小,故小齿轮用40CR(调质),硬度241HB-286HB,平均取为280HB,大齿轮用45钢(调质),硬度229B-286HB,平均取为240HB。选齿轮精度为7级。
(2) 节锥角的计算:
ι=cotδ1
δ1=arccotι=arccot1.66=22°22′06″
δ2=90°-22°22′06″=67°67′54″
扫地机器人直流无刷电机选择:
扫地机器人的移动结构使用差速转向式,为了实现差速运转就需要有调遣功能的扫地机直流无刷电机,知道扫地机直流无刷电机所需要的输出功率,可使用BLDC86+G扫地机直流无刷电机,得知扫地机运行需要电机的输出功率,而选用的这款电机输出功率大于我们所需的功率,满足需要,这款扫地机直流无刷电机的速度在每分钟3000~15000转之间可调,当我们调整扫地机直流无刷电机的转速为每分钟10000转时,扫地机直流无刷电机的转矩是6N.m。同样满足扫地机对转矩的要求,综上所述,选择BLDC86电机是合适的。
扫地机器人直流无刷电机转速控制:
扫地机器人直流无刷电机的转速通过PWM方式控制,脉冲宽度调制是把输出信号的基本周期固定,通过调整基本周期内工作周期的大小来控制输出功率,电机的旋转速度和加在电机两端的电压有一定的关系,施加在电机上的电压越大,那么电机的旋转速度也就越快。由于施加在电机的电压和占空比成正比,因此占空比的数值越大,施加在电机的两端电压也就越强,这样的话电机的旋转速度也就越快。
以上对于如何选择扫地机器人电机有一个初步概念,对于如何选择更适合的直流无刷电机,可以找拥有33年专业定制与生产电机的厂家--东莞东弘机电公司为您设计一款更加合适的电机。
-
电机控制
+关注
关注
3534文章
1876浏览量
268774 -
扫地机器人
+关注
关注
20文章
789浏览量
53437
发布评论请先 登录
相关推荐
台懋科技TM50G03NF:大功率扫地机器人性能升级的优选方案
扫地机器人应用解决方案
云鲸J5扫地机,养宠家庭不可错过的一款全能扫地机
霍尔开关在扫地机器人中的应用
无刷电机PCBA方案:智能扫地机的核心驱动力
扫地机器人的技术和芯片方案,有哪些创新?
汤诚科技推出扫地机器人、洗地机应用方案,为品质生活添彩
供应 英集芯IP2348,适用于扫地机器人解决方案的锂电池同步降压充电芯片
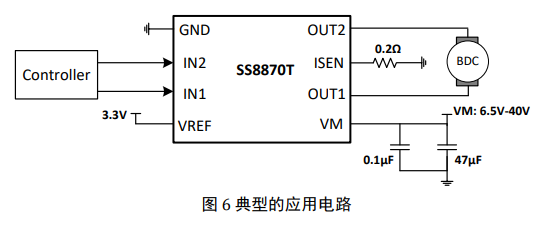
SS8870T-3.6A 扫地机和滚刷电机的大电流电机驱动
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
鸿蒙南向开发实战:【智能扫地机】
视觉、激光、结构光?扫地机器人导航避障技术盘点
艾为推出扫地机器人应用方案助力品质生活







 工商网监
工商网监
评论