 STM32定时器有什么功能?STM32的用法详解
STM32定时器有什么功能?STM32的用法详解
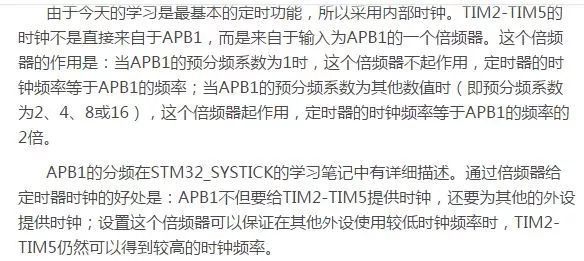
2.2 计数器模式
TIM2-TIM5可以由向上计数、向下计数、向上向下双向计数。向上计数模式中,计数器从0计数到自动加载值(TIMx_ARR计数器内容),然后重新从0开始计数并且产生一个计数器溢出事件。
在向下模式中,计数器从自动装入的值(TIMx_ARR)开始向下计数到0,然后从自动装入的值重新开始,并产生一个计数器向下溢出事件。而中央对齐模式(向上/向下计数)是计数器从0开始计数到自动装入的值-1,产生一个计数器溢出事件,然后向下计数到1并且产生一个计数器溢出事件;然后再从0开始重新计数。
2.3 编程步骤
1. 配置系统时钟;
2. 配置NVIC;
3. 配置GPIO;
4. 配置TIMER;
其中,前3项在前面的笔记中已经给出,在此就不再赘述了。第4项配置TIMER有如下配置:
(1)利用TIM_DeInit()函数将Timer设置为默认缺省值;
(2)TIM_InternalClockConfig()选择TIMx来设置内部时钟源;
(3)TIM_Perscaler来设置预分频系数;
(4)TIM_ClockDivision来设置时钟分割;
(5)TIM_CounterMode来设置计数器模式;
(6)TIM_Period来设置自动装入的值
(7) TIM_ARRPerloadConfig()来设置是否使用预装载缓冲器
(8)TIM_ITConfig()来开启TIMx的中断
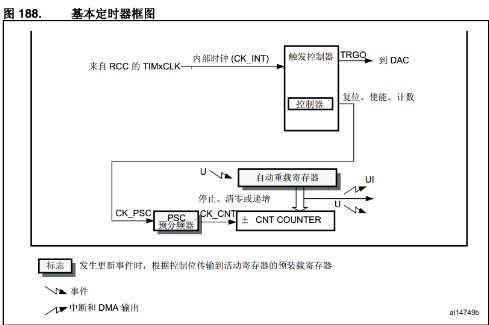
其中(3)-(6)步骤中的参数由TIM_TimerBaseInitTypeDef结构体给出。步骤(3)中的预分频系数用来确定TIMx所使用的时钟频率,具体计算方法为:
CK_INT/(TIM_Perscaler+1)。CK_INT是内部时钟源的频率,是根据2.1中所描述的APB1的倍频器送出的时钟,TIM_Perscaler是用户设定的预分频系数,其值范围是从0 – 65535。
步骤(4)中的时钟分割定义的是在定时器时钟频率(CK_INT)与数字滤波器(ETR,TIx)使用的采样频率之间的分频比例。TIM_ClockDivision的参数如下表:

数字滤波器(ETR,TIx)是为了将ETR进来的分频后的信号滤波,保证通过信号频率不超过某个限定。
步骤(7)中需要禁止使用预装载缓冲器。当预装载缓冲器被禁止时,写入自动装入的值(TIMx_ARR)的数值会直接传送到对应的影子寄存器;如果使能预加载寄存器,则写入ARR的数值会在更新事件时,才会从预加载寄存器传送到对应的影子寄存器。
ARM中,有的逻辑寄存器在物理上对应2个寄存器,一个是程序员可以写入或读出的寄存器,称为preload register(预装载寄存器),另一个是程序员看不见的、但在操作中真正起作用的寄存器,称为shadow register(影子寄存器);设计preload register和shadow register的好处是,所有真正需要起作用的寄存器(shadow register)可以在同一个时间(发生更新事件时)被更新为所对应的preload register的内容,这样可以保证多个通道的操作能够准确地同步。如果没有shadow register,或者preload register和shadow register是直通的,即软件更新preload register时,同时更新了shadow register,因为软件不可能在一个相同的时刻同时更新多个寄存器,结果造成多个通道的时序不能同步,如果再加上其它因素(例如中断),多个通道的时序关系有可能是不可预知的。
3. 程序源代码
本例实现的是通过TIM2的定时功能,使得LED灯按照1s的时间间隔来闪烁
#include "stm32f10x_lib.h"
void RCC_cfg();
void TIMER_cfg();
void NVIC_cfg();
void GPIO_cfg();
int main()
{
RCC_cfg();
NVIC_cfg();
GPIO_cfg();
TIMER_cfg();
//开启定时器2
TIM_Cmd(TIM2,ENABLE);
while(1);
}
void RCC_cfg()
{
//定义错误状态变量
ErrorStatus HSEStartUpStatus;
//将RCC寄存器重新设置为默认值
RCC_DeInit();
//打开外部高速时钟晶振
RCC_HSEConfig(RCC_HSE_ON);
//等待外部高速时钟晶振工作www.dgzj.com
HSEStartUpStatus = RCC_WaitForHSEStartUp();
if(HSEStartUpStatus == SUCCESS)
{
//设置AHB时钟(HCLK)为系统时钟
RCC_HCLKConfig(RCC_SYSCLK_Div1);
//设置高速AHB时钟(APB2)为HCLK时钟
RCC_PCLK2Config(RCC_HCLK_Div1);
//设置低速AHB时钟(APB1)为HCLK的2分频
RCC_PCLK1Config(RCC_HCLK_Div2);
//设置FLASH代码延时
FLASH_SetLatency(FLASH_Latency_2);
//使能预取指缓存
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);
//设置PLL时钟,为HSE的9倍频 8MHz * 9 = 72MHz
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);
//使能PLL
RCC_PLLCmd(ENABLE);
//等待PLL准备就绪
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET);
//设置PLL为系统时钟源
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
//判断PLL是否是系统时钟
while(RCC_GetSYSCLKSource() != 0x08);
}
//允许TIM2的时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
//允许GPIO的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
}
void TIMER_cfg()
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
//重新将Timer设置为缺省值
TIM_DeInit(TIM2);
//采用内部时钟给TIM2提供时钟源
TIM_InternalClockConfig(TIM2);
//预分频系数为36000-1,这样计数器时钟为72MHz/36000 = 2kHz
TIM_TimeBaseStructure.TIM_Prescaler = 36000 - 1;
//设置时钟分割
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
//设置计数器模式为向上计数模式
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
//设置计数溢出大小,每计2000个数就产生一个更新事件
TIM_TimeBaseStructure.TIM_Period = 2000 - 1;
//将配置应用到TIM2中
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseStructure);
//清除溢出中断标志
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
//禁止ARR预装载缓冲器
TIM_ARRPreloadConfig(TIM2, DISABLE);
//开启TIM2的中断
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);
}
void NVIC_cfg()
{
NVIC_InitTypeDef NVIC_InitStructure;
//选择中断分组1
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
//选择TIM2的中断通道
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQChannel;
//抢占式中断优先级设置为0
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
//响应式中断优先级设置为0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
//使能中断
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void GPIO_cfg()
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //选择引脚5
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //输出频率最大50MHz
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //带上拉电阻输出
GPIO_Init(GPIOB,&GPIO_InitStructure);
}
在stm32f10x_it.c中,我们找到函数TIM2_IRQHandler(),并向其中添加代码
void TIM2_IRQHandler(void)
{
u8 ReadValue;
//检测是否发生溢出更新事件
if(TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET)
{
//清除TIM2的中断待处理位
TIM_ClearITPendingBit(TIM2 , TIM_FLAG_Update);
//将PB.5管脚输出数值写入ReadValue
ReadValue = GPIO_ReadOutputDataBit(GPIOB,GPIO_Pin_5);
if(ReadValue == 0)
{
GPIO_SetBits(GPIOB,GPIO_Pin_5);
}
else
{
GPIO_ResetBits(GPIOB,GPIO_Pin_5);
}
}
}
-
STM32
+关注
关注
2276文章
10943浏览量
359096 -
计数器
+关注
关注
32文章
2278浏览量
95409 -
定时器
+关注
关注
23文章
3258浏览量
115868
原文标题:STM32定时器功能和用法详解
文章出处:【微信号:changxuemcu,微信公众号:畅学单片机】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
STM32有哪几种定时器 STM32高级定时器有哪些功能
STM32定时器详解
如何通过STM32的定时器输出PWM?

STM32---定时器知多少

stm32中断源有哪些_【话说定时器系列】之八:STM32定时器计数定时基本功能实验...
stm32捕获占空比_「话说定时器系列」之六:STM32定时器输入捕获话题
stm32捕获占空比_【话说定时器系列】之七:STM32定时器比较输出话题
STM32定时器的分类及中断原理





 工商网监
工商网监
评论