 干货总结:室内定位技术的3大常用算法
干货总结:室内定位技术的3大常用算法
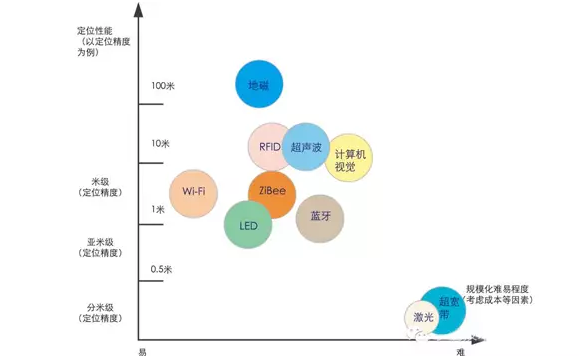
目前比较常见的室内定位技术有UWB(超宽带)室内定位技术,蓝牙室内定位,RFID(无线射频识别)定位,超声波定位,Wi-Fi定位等。但关于室内定位的算法,知道的人却不多,算法决定了它的定位模式。室内定位种类虽然多,但是室内定位算法很多都是通用的,总结起来有下面3种常用的算法。
一、近邻法
最简单的方式,直接选定那个信号强度最大的AP的位置,定位结果是热点位置数据库中存储的当前连接的Wi-Fi热点的位置。
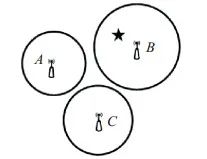
二、基于无线信号的三角测量法。
室内定位里面的三边定位算法是怎么实现的呢?这个方法来自于传统的定位方法,类似GPS定位。不过是实际使用过程中使用的是信号(RSSI值)衰减模型(如下图所示)。原理是在离线状态下,无线信号强度在空间中传播随着距离衰减! 而这个无线信号强度(RSSI值)对于手机上的接收器来说是可测的!那么依据测试到的信号强度,再根据信号衰减模型就可以反推出距离了。

当然,这种信号衰减模型是针对理想状况(真空,无反射),在实际的室内复杂环境下,信号在不断的折射反射(多路径效应)下,这个模型可能就出现了波动了。也就是说你通过测量信号强度来反推距离很大可能带有很大误差,同时由于不同传感器的信号特征不同,模型参数也不一而足,导致这个方法的定位精度有一定误差。
三、指纹定位方法
这个方法也是针对无线信号定位的。
室内定位中的指纹定位法原理:首先在室内收集很多的指纹数据也就是无线信号数据,定义一个个的网格点来采集无线强度,并存入指纹数据库。当需要定位的时候,通过手机采集到的无线信号和预先收集的指纹数据库对比,找出最相似的指纹的位置作为定位的位置。

这几种常见的定位算法也有各自的缺陷,如下:
(1)近邻法定位精度得不到保证;
(2)三角测量法理论上精度较高,但在实际应用中,由于多径效应和定位终端(通常是苹果手机、安卓手机)不统一性,导致每个终端接收到的信号强度可能都有区别,进而影响定位精度和误差的统一性(有的手机误差可能小,有的手机误差可能大,尤其是安卓手机);
(3)指纹法前期地图绘制工作量大,而且一旦定位的场地布置临时有变化,每个位置上的信号就会变化,从而导致定位不准。基站覆盖范围大,角度偏一点就会造成不小的误差,更何况各种非视距和多径环境的影响,造成一定的定位误差。
天工测控(SKYLAB)专业致力于提供室内定位服务解决方案,在人员监控与物品管理方面形成了突出的产品服务能力,现已推出的蓝牙室内定位技术基于蓝牙beacon/蓝牙网关/蓝牙手环等硬件,配套定位算法、矢量地图、服务器等,能够实现3米的高精度室内定位和导航功能;UWB超宽带定位技术,基于SKYLAB自主研发的uwb室内定位算法、uwb基站、uwb标签等,最高可以实现0.1-0.3cm的超高定位精度。
SKYLAB的室内定位技术现已服务于医院、展馆、幼儿园、养老院、监狱等公共场所,比如吉林、深圳的部分妇幼医院以及养老院、监狱等已成功采用SKYLAB的室内定位方案,全方面进行人员管理。
-
算法
+关注
关注
23文章
4604浏览量
92710 -
室内定位
+关注
关注
30文章
301浏览量
36512
发布评论请先 登录
相关推荐
探讨几种常用室内定位技术
为什么UWB定位技术可用于室内定位?
基于UWB技术的室内定位方法简述
常用室内定位技术探讨

干货:SKYLAB的室内定位技术能够解决哪些问题呢?
室内定位中非视距的识别和抑制算法研究综述





 工商网监
工商网监
评论