 分析车载雷达通信系统用于自动驾驶和智慧交通的应用前景和发展趋势
分析车载雷达通信系统用于自动驾驶和智慧交通的应用前景和发展趋势
雷达通信一体化是同时具有目标探测和信息交互的系统,是近年来雷达和通信技术研究的一个重要方向,车载雷达通信系统是其重要的应用之一。本文梳理了外关于雷达通信系统研究的文章,介绍了雷达通信一体化系统的评价指标、系统构成和波形设计方案,总结了系统的雷达指标和通信指标的仿真性能研究成果,并分析了车载雷达通信系统用于自动驾驶和智慧交通的应用前景和发展趋势。
雷达通信的概念约在 21 世纪初被提出来 [1-5],雷达通信一体化概念的提出则是为了适应未来高科技战争。雷达系统和通信系统作为电子战平台的基本组成部分,在军事方面的作用至关重要。长期以来,这些系统都是各自纵向发展,但随着技术的进步,各系统间的差距逐渐减少,于是系统间的横向一体化发展问题开始受到关注,即从横向上对现有系统进行融合,使其具备通用性和多功能性。如果能实现雷达通信一体化,不仅能够减少电子战平台的体积和电磁干扰,更可以提升战场指挥效率。
虽然雷达系统和通信系统由于用途的不同在工作方式、功能实现和信号特征等方面都存在显著差异,但从系统原理来看,雷达技术和通信技术都与电磁波在空间的发射和接收有关。从系统结构来看,两者的硬件系统都包括天线、发射机、接收机和信号处理器等模块;从技术的发展趋势来看,雷达由传统硬件器件实现的功能正在由数字信号处理来取代完成。同时,通信系统的载频也转移到微波领域,与传统雷达使用的频率处于同一数量级。因此,雷达系统和通信系统从硬件结构实现到软件算法处理都正在趋同。
雷达系统和通信系统的一体化首先是以共用相同的硬件平台为基础。最简单的是时分共享的方式,利用选通开关,雷达系统和通信系统分时复用天线、发射机和接收机等硬件平台,但是这种方式下两个系统都不可能连续长时间地占用资源,否则就会影响另一个系统的性能;而本系统也由于工作时间有限而使得系统性能受限。
另一种硬件平台共享的方式主要用于相控阵雷达,将二维阵列分成多个子阵,每个子阵独立工作,用于实现雷达或通信功能,但是由于子阵的功率受限,雷达和通信系统的性能都会受到影响。因此,这种硬件共享、独立实现雷达和通信功能的一体化技术由于资源受限不仅对系统性能有影响,而且限制了系统效率的提升。因此,近年来雷达通信一体化的研究开始关注信号方面的融合,即在同一硬件平台上利用同一信号实现雷达和通信功能。
车载雷达通信系统利用车辆已经装载的毫米波雷达以及雷达通信一体化技术,不仅可以实现车载雷达探测和车间通信功能,而且不会额外增加汽车的硬件模块,也不会因为通信功能的引入而使得汽车的电磁环境更加复杂,既降低成本又可以提高频谱利用率。因此,车载雷达通信系统将会成为雷达通信一体化技术从军事应用转向民用领域的重要突破之一。
1. 车载雷达通信系统的研究意义
车载雷达通信系统正面对巨大的市场机遇。一方面,各国政府对交通安全的重视升级,自动紧急刹车、前向碰撞告警、车道偏离告警等汽车安全技术不断被纳入相关的法律法规。另一方面,自动驾驶成为全球研究的热点,更在「中国制造 2025」中上升为国家战略之一。
目前业界采用的高级驾驶辅助系统仅依靠搭载的摄像头、红外、激光雷达等各种车载传感器来为单车智能驾驶提供辅助。而与高级驾驶辅助系统相比,车载雷达通信系统是在车载毫米波雷达系统上一体化实现现代通信技术,在实现雷达探测功能的同时建立车联网的通信连接,使汽车同时具备复杂环境感知、信息共享、智能化决策等功能,为智能驾驶提供最有效的保障。
车载雷达通信系统不仅具有毫米波雷达的探测优势,即在车辆对周围环境感知的功能上具有全天候、全天时、高精度、高分辨率的特点,而且可以通过车载雷达通信系统建立的车联网实现车辆自身及其周围环境信息的传递与共享,车辆可以获得超视距范围的环境认知,从而使车辆具有了「视觉+听觉」的能力。因此,车载雷达通信系统是支持智能驾驶和智慧交通最基础、最有效的手段。
并且,随着 5G 通信时代的来临,通信的频段已不限制于 6 GHz 以下,而是扩展到十几吉赫兹到几十吉赫兹的微波波段。而车载雷达通信系统可使用全球统一的频谱,即 24 GHz、77 GHz、79 GHz 频段。这些频段与 5G 高频通信频段和微波通信频段接近。因此,基于雷达技术和通信技术的同源性,通过研究车载雷达通信系统,不仅使得车-车间通过车载雷达建立车车通信联网成为可能,而且可对 5G 高频通信技术的研究提供技术积累。
2. 车载雷达通信系统的研究现状
2.1 雷达通信一体化的评价指标
雷达通信一体化的评价指标包括雷达指标和通信指标。通常雷达指标主要涉及雷达对目标的距离、速度、角度等各方面的测量要求,主要包括测量范围、测量精度、分辨率等指标。通信指标主要为信噪比、数据速率等,且通信功能的引入不能降低雷达的探测性能。
以下主要介绍雷达指标。
2.1.1 距离
(1)雷达作用距离
雷达的作用距离可由雷达方程来得出,雷达方程将雷达的作用距离和雷达发射、接收、天线和环境等各因素联系起来,可以反映雷达各参数对雷达作用距离的影响程度。基本雷达方程为:

其中,R_max是雷达的最大作用距离,P_t是雷达发射功率,G_t和G_r分别是发射天线和接收天线的增益,σ是雷达截面积,S_sim是雷达接收机最小可检测信号功率。
(2)测距范围
测距范围包括最小可测距离和最大单值测距范围。
最小可测距离是指雷达能测量的最近目标距离。对于脉冲雷达来说,收发天线是共用的,在发射脉冲宽度 τ 的时间内,接收机无法接收目标回波,在发射脉冲结束后将天线收发开关转换到接收状态也需要一定的时间 t_0,接收机也不能接收目标回波。因此,雷达的最小可测距离为:

雷达的最大单值测距范围由脉冲重复周期T_m决定。为保证单值测距,通常应选取T_m ≥ 2R_max/c,其中R_max是被测目标的最大作用距离。当雷达重复频率不能满足单值测距的要求时,将产生距离模糊。
(3)距离分辨率
距离分辨率通常是指同一方向上两个大小相同的点目标之间的最小可区分距离。对于简单的脉冲雷达信号,脉冲越窄,距离分辨力越好。对于复杂的脉冲压缩信号,决定距离分辨率的是雷达信号的有效带宽B,有效带宽越宽,距离分辨率越好。距离分辨率可表示为:
(4)测距精度
测距精度是指雷达对被测目标距离测量的准确度,一般用均方根误差来表示。理论上,单个强散射点距离的最小均方根误差可以表示为:

其中,E/N_0为信噪比。可以看出:雷达的测距精度与信号带宽和信噪比成反比。
2.1.2 速度
根据多普勒频率,其中 v_r 为径向速度,测速精度可以表示为:
速度分辨率为:
其中,τ 是信号持续时间,正比于信号时宽。可以看出:测速精度和速度分辨率都与信号时宽成反比,且信号波长越短,测速精度和速度分辨率越高。
2.1.3 角度
角度的测量与天线孔径有关,若天线的半功率波束宽度为:

则方位角或俯仰角的测量精度可以表示为:

2.2 雷达通信一体化系统的波形设计
雷达通信一体化系统最大的挑战就是找到合适的信号能同时完成信息的传递和雷达探测功能。雷达和通信的参数都跟信道特性有关,最主要的信道特性是多普勒频率和最大多径时延,并且由于回波经历了二倍的传播路径,因此这些特性对雷达的影响更大。除了信道的物理特性外,还有一些只针对雷达性能的限制,主要跟雷达的模糊函数有关。
传统雷达波形设计的目的是得到具有最优自相关特性的波形来保证雷达探测性能。雷达波形的选择要考虑 3 个性能因素:目标距离、多普勒和方位角。对于车载雷达来说,在交通密集的区域,波形应能有效地对抗干扰和噪声。而通信的主要性能指标包括:覆盖范围、时延、数据速率、系统容量等。通信波形的选择是要保证能对抗各种信道衰落以及多用户干扰从而正确的解调解码出通信信息。
考虑到现有雷达的实现技术和现有的通信技术,车载雷达通信一体化信号的主要研究方向有:基于线性调频的雷达通信 [4]、基于扩频的雷达通信 [6-9]、基于 OFDM 的雷达通信 [10-11]。当然,这些技术还可进一步与多天线 [7]、波束赋形等技术结合起来。
2.3 基于线性调频的雷达通信
基于线性调频的雷达通信主要分为 2 类:基于准正交波形叠加的方案 [4-5] 和基于单一波形的方案 [11-13]。在单一波形方案中,又可分成 2 类:基于波形分离方案 [9,14] 和基于分数阶傅里叶变换的方案 [6]。
2.3.1 基于准正交波形叠加的方案
在基于准正交波形叠加的方案 [4-5] 中,雷达信号和通信信号使用相互「正交」的波形,例如:雷达探测可以使用 Down-Chirp 信号(频率随时间线性下降),通信数据可以使用 Up-Chirp 信号(频率随时间线性上升),并使用 2 个「正交」的匹配滤波器分别提取期望的信号。用户之间的数据可以通过不同的调频斜率、不同的发射时间、不同的起始频率等来区分。此方案中,雷达信号为:

通信信号为:

雷达信号和通信信号在一个雷达脉冲内是基本正交的。

图 1 基于准正交波形叠加的方案的示意图
(DQPSK:四相相对相移键控)
基于准正交波形叠加的方案的示意图如图 1 所示。
2.3.2 基于波形分离方案

图 2 基于波形分离的方案的示意图
基于波形分离方案的示意图如图 2 所示[13]。在发射端,编码后的通信信息调制到雷达波形上发射。在接收端,通过分离器将雷达信号和通信信号进行分离之后再分别进行处理。分离的方法包括同态滤波、白化等。
2.3.3 基于分数阶傅里叶变换的方案
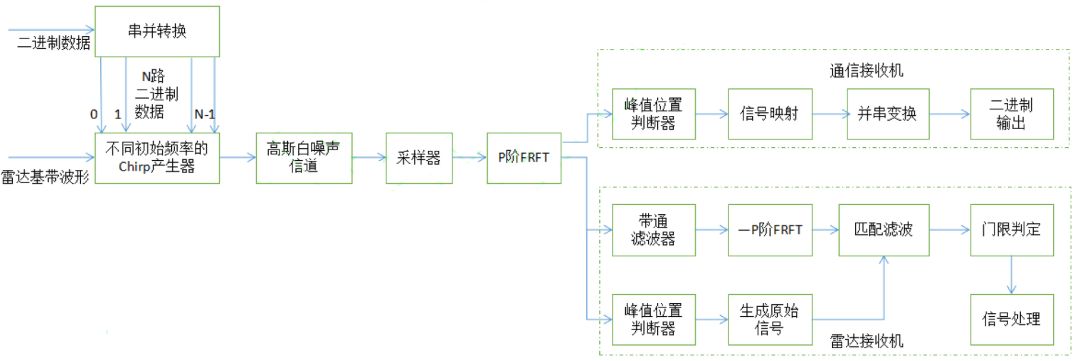
图 3 基于分数阶傅里叶变换的方案的示意图
(FRFT:分数傅里叶变换)
基于分数阶傅里叶变换(FRFT)方案的示意图如图 3 所示 [11]。雷达信号和通信信号是同一个,通信数据调制在不同的初始频率的 Chirp 信号上,接收端使用分数阶傅里叶变换分别把通信数据和雷达信号提取出来。
2.3.4 基于扩频的雷达通信
为了获得较好的通信性能,可以考虑使用具有良好自相关特性的扩频信号来作为雷达通信一体化的信号。系统只发射一个扩频信号,一方面,系统利用自己发射的信号回波进行目标探测,实现雷达功能;另一方面系统通过该发射信号给另外的系统发射通信数据。用户之间的数据通过不同的扩频码来区分。
一个雷达接收到的信号 [7] 为:

用本地码与接收到的雷达信号做相关之后得到:

在对公式进行简化之后,当τ = 2R/c_0 - (k-i)T时,可得到相关峰值。此时,k = i + 2R/(c_0*T),进而知道了目标的距离、使用的扩频码,可以进一步解调出数据,并得到目标速度(从码相位推出)。
2.3.5 基于 OFDM 的雷达通信
OFDM 信号 [10] 也是目前雷达通信一体化系统波形设计的研究内容之一。OFDM 信号作为雷达信号,具有图钉状的模糊函数,同时具有距离和多普勒的高分辨率,而没有距离——多普勒耦合问题,可以独立地处理距离和多普勒信息。
但 OFDM 信号对多普勒频移更加敏感,会破坏回波子载波之间的正交性,从而需要频偏估计与补偿。另外,OFDM 信号具有较高的峰值平均功率比(PAPR),如果要获得较高的发射功率,则要尽量降低信号的 PAPR 并采用大动态范围的线性放大器。

图 4 基于 OFDM 方案的示意图
(FFT:快速离散傅里叶变换;IFFT:离散傅里叶逆变换)
基于 OFDM 信号的雷达通信示意如图 4 所示[10]。雷达信号和通信信号是同一个,一个雷达收到的自己的回波为 [7]:

用其跟本地发射的信号相除,然后经过一系列离散傅里叶逆变换(IDFT)/离散傅里叶变换(DFT)运算之后,即可得到距离(R)和速度(f_D)。
其他雷达收到上述信号后,进行快速傅里叶变换(FFT)运算、解调、解码之后即可得到通信数据。
2.4 仿真/测试结果
目前,雷达通信一体化信号的研究主要集中在调频连续波、扩频信号、正交频分复用技术(OFDM)信号这 3 种类型,相关的研究和仿真也多是基于这 3 种类型。
2.4.1 雷达性能
2.4.1.1 线性调频方案的仿真/测试结果
文献 [4] 中,作者使用了 Up-Chirp 信号(雷达)和 Down-Chirp 信号(通信)(它们基本正交),Chirp 信号的调频率为 40 MHz/μs,系统带宽为 80 MHz,脉冲时间为 2 μs(频率从最低到最高所需要的时间),处理增益(时宽带宽积)为 22 dB,数据调制方式是π/4-DQPSK;射频频率为 10 GHz。
从文献 [4] 中的仿真结果可知:当信号与干扰加噪声比(SINR)超过 15 dB 时,检测概率可达到 85%(或更高),从而可以检测出大多数目标。
文献 [5] 中,作者使用了 Up-Chirp 信号(雷达)和 Down-Chirp 信号(通信)(它们基本正交),Chirp 信号的调频率为 1 GHz/μs,载波频率为 750 MHz,系统带宽为 500 MHz,脉冲时间为 0.5 μs(频率从最低到最高所需要的时间),处理增益(时宽带宽积)为 24 dB;数据调制方式是二进制相移键控(BPSK),射频频率为 75 MHz,发射功率为 27 dBm。
从文献 [5] 的测试结果可知:其雷达通信系统能可靠地区分出 10 m 之外的 2 个相隔 63 cm 的目标。另外,文献 [5] 还提到,其目标检测概率为 99%。
2.4.1.2 直接序列扩频方案的仿真/测试结果
文献 [11] 中,作者使用的仿真设置为:使用 m 序列来扩频(SF=15,31,63,127,255);码片速率为 48 MCps;信号带宽为 96 MHz;数据长度为 256 个符号,数据调制方式为 BPSK。从文献[11]的仿真结果可知:当 SINR 超过 0 dB 时,峰值旁瓣(PSL)(SF=255)达到 40 dB,从而能有效地区分出 2 个不同的目标。
2.4.1.3 OFDM 方案的仿真/测试结果
文献[7]中,作者使用的仿真设置为:载波频率为 5.9 GHz,全相位 OFDM 子载波个数为 512,CP 长度为 1.4 μs,加入 CP 后的全相位 OFDM 符号长度为 23.8 μs,系统带宽为 91.5 MHz,一帧内的全相位 OFDM 符号个数为 177,一帧的时间长度为4.25 ms,子载波间隔为180 kHz。从文献[7]的仿真结果可知:当 SINR 超过 0 dB 时,距离的均方误差(MSE)几乎接近于 0,从而能有效地区分出 2 个不同的目标;当 SINR 超过 0 dB 时,Doppler 频移的 MSE 约为 100 Hz(等价于 5 m/s,18 km/h),从而能有效地区分出 2 个不同的运动速度。
从上面的仿真结果可以看出:3 种雷达通信的方案能有效地检测出目标。
2.4.2 通信性能
2.4.2.1 线性调频方案的仿真/测试结果
文献[4]中,作者使用了 Up-Chirp 信号(雷达)和 Down-Chirp 信号(通信)(它们基本正交),Chirp 信号的调频率为 40 MHz/μs,系统带宽为 80 MHz,脉冲时间为 2 μs(频率从最低到最高所需要的时间),处理增益(时宽带宽积)为 22 dB,数据调制方式是π/4-DQPSK;射频频率为 10 GHz。
从文献[4]的仿真结果可知:当 SINR 超过 11 dB 时,误码率(BER) 低于 0.1%,从而可以满足一般的通信性能需求。
2.4.2.2 直接序列扩频方案的仿真/测试结果
文献 [7] 中,作者使用的仿真设置如下:载波频率为 2 MHz,采样频率为 20 MHz,使用 m 序列来扩频,扩频因子为 15 或 31,码片宽度为 1 μs,数据调制方式为差分相干二进制相移键控(DBPSK),数据长度为 2000 个符号。
从文献 [7] 的仿真结果可知:当 SINR 超过 3 dB 时,BER(SF=15 的)低于 0.1%,从而可以满足一般的通信性能需求。
2.4.2.3 OFDM 方案的仿/测试真结果
文献 [10] 中,作者使用的仿真设置如下:载波频率为 5.9 GHz,全相位 OFDM 子载波个数为 512,CP 长度为 1.4 μs,加入 CP 后的全相位 OFDM 符号长度为 23.8 μs,系统带宽为 91.5MHz,一帧内的全相位 OFDM 符号个数为 177,一帧的时间长度为 4.25 ms,子载波间隔为180 kHz。
从文献 [10] 中的仿真结果可知:当 SINR 超过 8.2 dB 时,BER 低于 0.1%,从而可以满足一般的通信性能需求。
从上面的仿真结果可以看出:3 种雷达通信的方案在不太高的 SINR 下能较好地传输数据。
2.5 试验/测试系统
2.5.1 基于线性调频的雷达通信试验系统

图 5 基于线性调频的雷达通信实验系统
(LHCP:左旋圆偏振;PRBS:伪随机二进制序列;RHCP:右旋圆偏振)
如图 5 所示 [5]:该系统的工作频率为 750 MHz,带宽为 500 MHz,距离分辨率为 63 cm,雷达检测概率为 99%,虚警为 7%。在 1 Mbit/s 速率下的 BER 为 0.002(这时雷达脉冲重复频率为 150 kHz,雷达脉冲时间宽度 1.5 ns)。
2.5.2 基于直接序列扩频的雷达通信测试系统
图 6 基于直接序列扩频的雷达通信测试系统(信号处理板卡)
图 6 为(南京理工大学)基于直接序列扩频的雷达通信测试系统(信号处理板卡),由现场可编程门阵列(FPGA)、模数转换(A/D)、数模转换(D/A)等组成 [8]。该系统使用 30 MHz中频、31 位 m 序列扩频,通信速率为 129 kbit/s,PSL 为 13 dB。
2.5.3 基于 OFDM 的雷达通信试验系统
图 7 OFDM 超宽带合成孔径雷达试验系统
美国迈阿密大学研制了超宽带合成孔径雷达,并使其成为通信雷达一体化系统,图 7 为他们在实验室研制的 OFDM 超宽带合成孔径雷达试验系统 [15-16]。
2.6 小结
从以上的仿真和试验系统可以看出:车载雷达通信系统可以使用多种信号来实现,最简单的是使用目前最常用的雷达信号——调频连续波(FMCW),通信信息直接调制在该信号上,也可以使用现有的通信信号,比如扩频信号和 OFDM 信号。根据仿真验证:
24 GHz 车载雷达通信系统的雷达作用距离可达 100 m,通信距离则在 500 m 以上,数据的传输速率最高可达 20 Mbit/s(采用 OFDM 信号);
使用 77 GHz 车载雷达通信系统的话,雷达的测距范围和有效的通信距离基本相当,可达 250 m,峰值数据速率为 20 Mbit/s(采用 OFDM 信号),而距离和速度的分辨率和精度都远高于 24 GHz 系统。
其中,距离分辨率可小于 1 m,测速范围可达 ±200 km/h。至于时延指标,除了传播时延和系统处理时延外再无其他网络时延,可以满足汽车安全的时延要求 [17-19]。
因此,从仿真验证的结果来看,车载雷达通信系统完全可以在不损失雷达性能的条件下实现车联网通信,不仅可以为车辆提供驾驶辅助的各项功能,而且获得更远视角的道路信息,满足智能驾驶对传感器感知信息和网联信息融合的需求。
3. 结束语
在技术创新的驱动下,通信、互联网与各行业的融合发展日新月异,万物互联的时代已经开启,不仅包括人与人、人与物之间的联接,也包括物与物之间的联接,车联网就是其中重要的组成部分。
而对于汽车产业,伴随着人们对汽车驾驶的舒适度、安全性等用户需求的提升,自动驾驶成为人们追求的炙手可热的目标之一。目前自动驾驶产业整体水平处于 Level 1/Level 2(根据美国 NTHSA 或 SAE 标准)或驾驶辅助(根据中国 SAE 标准)水平,中国的先进驾驶辅助的各主要功能的新车渗透率除了车身电子稳定系统之外都不足 10%。
根据中国汽车工程学会发布的信息,中国到 2020 年将推进以自主环境感知为主、网联信息服务为辅的部分自动驾驶的应用,到 2025 年重点形成网联式环境感知能力并实现复杂工况下的高度自动驾驶,到 2030 年通过 V2X 协同控制实现完全自动驾驶。
因此,如何从目前低渗透率的驾驶辅助阶段快速有效地推进到具有自主环境感知能力和网联功能的自动驾驶阶段成为关键问题。通过车载雷达通信系统,车辆不仅可以通过自身雷达探测功能感知周围环境,更可以在车辆之间建立通信网络,通过协作式的通信获得更广范围的区域信息。远近信息的融合不仅为车辆自身的安全驾驶提供有力的保障,更可以实现全道路的智能驾驶和整体交通效率的提升。
因此,车载雷达通信系统将会成为自动驾驶产业最核心的传感器之一,加速智能网联汽车的产业化进程,进而提升自动驾驶产业的整体水平。
-
车载雷达
+关注
关注
0文章
36浏览量
13604 -
自动驾驶
+关注
关注
785文章
13966浏览量
167353 -
智慧交通
+关注
关注
5文章
721浏览量
27035
原文标题:车载雷达通信系统综述
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
自动驾驶真的会来吗?
自动驾驶的到来
浅析自动驾驶发展趋势,激光雷达是未来?
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛
迈向自动驾驶和电动汽车之路研讨会
中国自动驾驶行业前景看好,国产技术迅速发展
网联化自动驾驶的含义及发展方向
自动驾驶技术的实现
自动驾驶技术的优势及发展趋势







 工商网监
工商网监
评论