 如何制作一个简易的磁悬浮?
如何制作一个简易的磁悬浮?
在折腾数字的PID电机控制之前,我想再弄一个模拟电路的磁悬浮东东,来加深对PID的理解。这个磁悬浮,就是让一块磁铁悬浮在一个电磁铁下面,属于下拉式的,相对比较简单,不过也是很锻炼动手能力的东西。
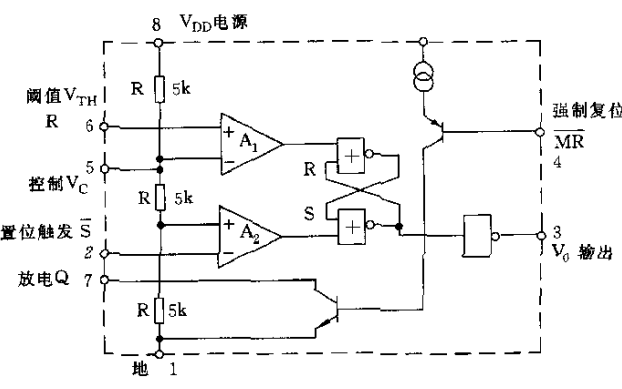
先说说PID,PID算法最早是根据船员控制轮船的行为发明的。早期的模块都是模拟电路的,后来才慢慢过渡到数字电路。看看下面这个模块,真是当时的科技精华啊:
PID控制器由比例单元(P)、积分单元(I)和微分单元(D)组成。其输入e (t)与输出u (t)的关系为
u(t)=kp[e(t)+1/TI∫e(t)dt+TD*de(t)/dt] 式中积分的上下限分别是0和t
具体代表的含义和意思google去,不乏很透彻的解释。比例、积分、微分单元,刚好是运放的典型电路,大致就是先拿到输入和输出的差,构造三个单元电路相加即可。
所以,一步一步来,这篇先做一个只有P的电路,后面再加上I和D,这样也有一个比较,加深理解。
电路图,霍尔传感器一定要买线性的,一个典型的差动比例运算电路:
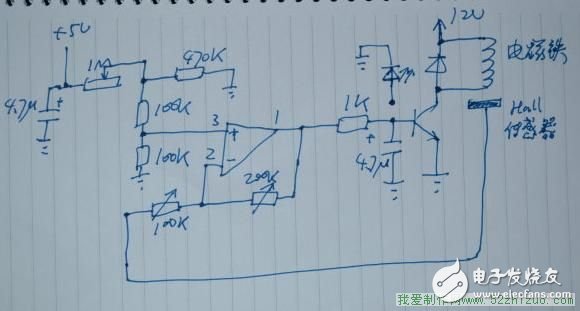
电路很简单,弄好了像下面这样,黑乎乎的是电磁铁支架,霍尔传感器放在最底部(桌面)。
只有P单元的情况下,磁铁震动比较来还,而且振动容易越来越大,最后磁铁掉下来,符合理论估计。
OK,先到这,后面加上I和D看看,到时候再上文章。
前面发过一个制作磁悬浮的帖子,这几天有空抽出时间做了改进,加进了PID部分。先上图:
原理图如下。网上基于单片机的方案不少,不过模拟电路的真不多。原理并不复杂,就是根据PID的公式来做。先用电压比较电路得到error,即你想要磁铁停留位置po的霍尔器件的输出电压值和实际霍尔器件返回的真实值的差。后面三路并联,分别是PID,最后通过相加器得到Vout。Vout再和一个固定的输入电压相加,(这个固定电压相当于让电磁铁磁力在po位置对磁铁的吸力和磁铁重力相等的值,这样才符合PID的原理),就是最终给电磁铁供电的电压。
-
磁悬浮
+关注
关注
10文章
101浏览量
20023
发布评论请先 登录
相关推荐
谁能教一下磁悬浮玩具的...
磁悬浮列车
手工DIY创意磁悬浮陀螺的制作方法图解
基于无线供电的磁悬浮灯的简单介绍
如何制作一个简易的太阳能磁悬浮马达?
磁悬浮的原理及制作
如何实现常导和超导磁悬浮演示试验装置的控制论文资料概述





 工商网监
工商网监
评论