 有关Model 3 Autopilot控制器的更新
有关Model 3 Autopilot控制器的更新
去年10月份的时候,超哥的Tesla的P2.5然后分了两篇文章写,
从特斯拉AP2.0/2.5 运算单元看未来无人驾驶域控制器的设计趋势1
拆解特斯拉AP2.0/2.5运算单元看未来无人驾驶域控制器的设计趋势2
从这个基准来看,确实像这两篇文章所说的,实际量产的产品在这个基础上是迭代的。 AP2.5正反面一共有两块板,正面是一块Parker的自动驾驶控制板,反面是基于Intel芯片加上SPC5748G MCU
Autopilot板子:这块板子具体的还需要仔细学习一下,主要是要核对一下这个板子和NV之前的一些参考有多大的差异,基本如超哥之间分析的那样两颗NVIDIA “PARKER” +NVIDIA GP106-510-KC的芯片,与整车交互的是INFINEON TriCore AUTRIX TC297TX-128 MCU
寻常我们采用计算芯片,水冷的还是少,这里专门为了这个芯片做了好多的结构,用了不少的传热胶来保证芯片的散热
在这个里面,一个是考虑结构固定方面,一个是布置位置。如果偏向于底盘和动力方面,怎么引入较大大面积的计算芯片对于这个芯片的保护和布置需要挺多的震动和耐久方面的考虑
在整个线束上,需要梳理一下各个摄像头传输到这个主板的路径
各个摄像头的数据都直接拉进来进行处理,包含REAR CAM后摄像头、SELFIE内置驾驶员摄像头、MAIN CAM前置主摄像头、B-PILLAR B柱两路摄像头和FISHEYE NARROW两路窄幅鱼眼摄像头
REPEATER两路转发和GPS天线
这边是偏向于传统的控制器,主要是基于Tri-core的传统交互和运行部分
金属部分是Tegra的调试和连接
黑色的为MCU连接
白色为通信IO
内部很多设计,有些跟不上节奏,需要做一轮基于这类视频处理的硬件方面的对比学习^_^
两块电路板之间没有物理连接在单元内部,共用了水冷散热部分,整合到同一个金属外壳之中,在这个里面,设计到ECU的冷热管理在未来也比较有趣
大部分的发热单元都采用了导热胶
在核心的主芯片上面还放置了一段PTC来辅助热启动,温度范围不够宽靠温度管理来救
小结:看到日经有关《先锋沦落到向其他企业求援》,在汽车内部,汽车电子价值链的转移非常快,核心价值有个技术导入的过程,也叫清盘洗场子
-
控制器
+关注
关注
112文章
16361浏览量
178038 -
特斯拉
+关注
关注
66文章
6313浏览量
126566 -
自动驾驶
+关注
关注
784文章
13812浏览量
166453
原文标题:Tesla的Autopilot控制器
文章出处:【微信号:QCDZSJ,微信公众号:汽车电子设计】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
Model S和Model X将升级8.0版固件,增强驾驶体验
史上最全特斯拉Model 3谍照 就这样没跑了
特斯拉10月17日发布MODEL 3,或搭载二代Autopilot自动辅助驾驶技术

特斯拉正式升级Autopilot自动辅助驾驶更新
马斯克承诺将通过增强语音调整Model 3的控制和功能
有关存储控制器的热门技术你知道多少?
美国NTSB公布了Model 3 Autopilot致死事故调查报告 揭示相撞全过程
新款Model 3配置升级美国首发,国产尚无更新消息,引发网友关注
特斯拉软件更新 将扩大Model 3的里程量
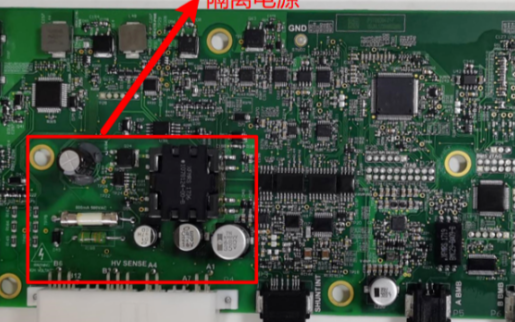
MODEL 3控制器上面的一个隔离反激电源模块
特斯拉在Model 3到Model Y的区域控制器
model 3新款什么时候出?今日特斯拉发布新款Model 3焕新版25.99万 新款Model3焕新版有什么更新?
使用Model Composer设计PID控制器的Versal ACAP应用说明






 工商网监
工商网监
评论