 关于伺服驱动器及机器人的智能制动控制设计解析
关于伺服驱动器及机器人的智能制动控制设计解析
概述
变速驱动器广泛用于各种应用,包括机器人和计算机数控(CNC)机器。安全一直以来都是大家非常关注的问题,因为无论什么时候,这些与人类息息相关的系统都会涉及到保持和运动控制。
特性
实施符合 EN 61800-5-2 规定要求的安全制动控制
保持制动器额定电压 24V、电流高达 2A,可通过独立控制信号进行控制
双路开关控制提高操作安全性
自诊断功能涵盖开路检测和过流保护
高侧开关故障检测
通过快速减小保持制动器电流,快速应用保持制动器
可选择减小保持制动器输出电压,从而降低功耗
应用
伺服驱动器、机器人和CNC
制动闸控制器
1.系统概述
自动化生产过程中存在着大量风险因素,特别是垂直运动情况下的重力,如果发生电源故障或制动装置失灵,后果将不堪设想。
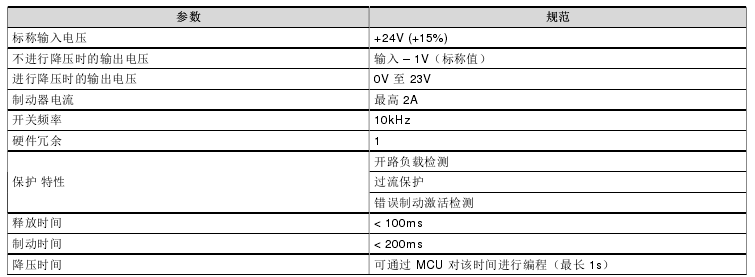
系统规格
2.系统方框图
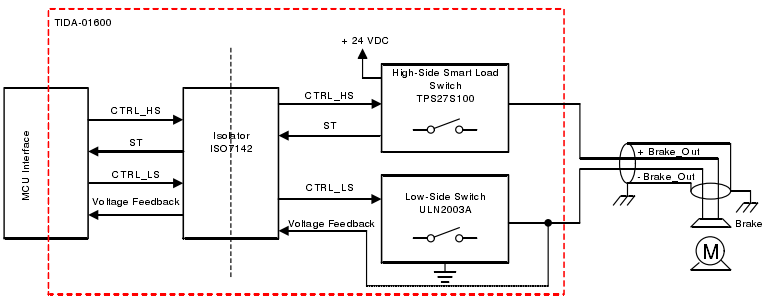
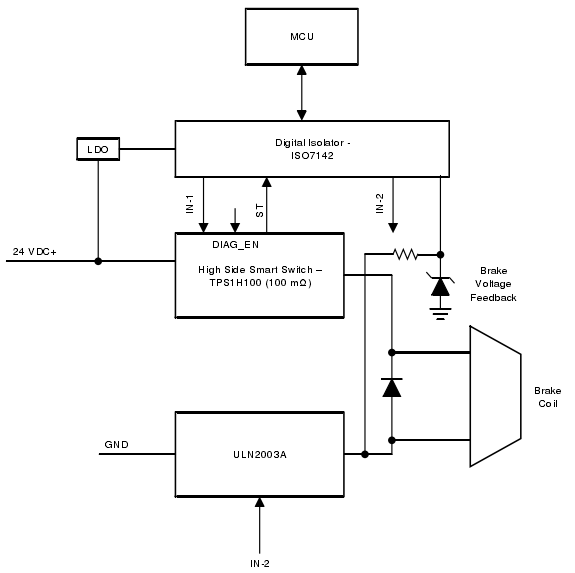
下图是系统方框图:
该电路板通过两个外部24V电源供电。MCU和数字隔离器的VCC1使用LMZ14201 SIMPLE SWITCHER⑧通过24V电源提供的3.3V输出进行供电。高侧开关和数字隔离器的VCC2使用TPS7B6933 LDO通过24V电源提供的3.3V输出进行供电。
该系统具有过载、短路和过热保护,而且可以检测开路负载。TPS27S100的状态输出引脚会产生对应于开路负载检测以及短路和过热保护的故障信号。系统会将该故障信号通过隔离器馈送至MCU。
来自制动线圈的电压反馈可用于监控意外接通,还可用于调整来自制动线圈的电压。您可以在ULN2003A低侧开关上选配PWM特性,以便控制制动线圈的峰值和保持电流。
3.系统原理
(1)直流电压输入
本设计适用于在24V (+15)的直流电压下运行。电路板上有两个独立的连接器,用于为初级侧和次级侧提供24V电源。J1是为初级侧提供24V直流电压的输入连接器。
直流电压可在连接器J2处施加到本参考设计上。TVS3300是在双向配置内连接的33V精密钳位器,可在高压瞬态期间提供保护。电感器L1和电容器C8组成了功率滤波器。
(2)低功耗四通道数字隔离器
MCU通过IS07142数字隔离器发送控制信号,独立地驱动高侧和低侧开关。此外,来自高侧开关的状态引脚输出(可提供故障状态的诊断范围)和来自制动线圈的电压反馈会通过数字隔离器反馈至MCU 。下图显示了IS07142的电路。
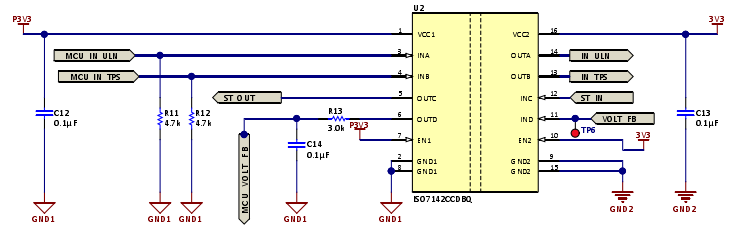
数字隔离器IS07142的原理图和电路
VCCI引肚口上施加的是使用LMZ14201 SIMPLE SWITCHER生成的3.3V电压。C12 (0.1 }F)用作VCCI引脚的局部去祸电容器。隔离器的EN1引脚连接至高电平,以启用初级侧中的输出通道。
VCC2引脚上施加的是使用TPS7B6933 LDO生成的3.3V电压。C13(0.1µF)用作VCC2引脚的局部去耦电容器。隔离器的EN2引脚连接至高电平,以启用次级侧中的输出通道。
(3)高侧开关
使用TPS27S100作为高侧开关。下图显示了高侧开关的电路。
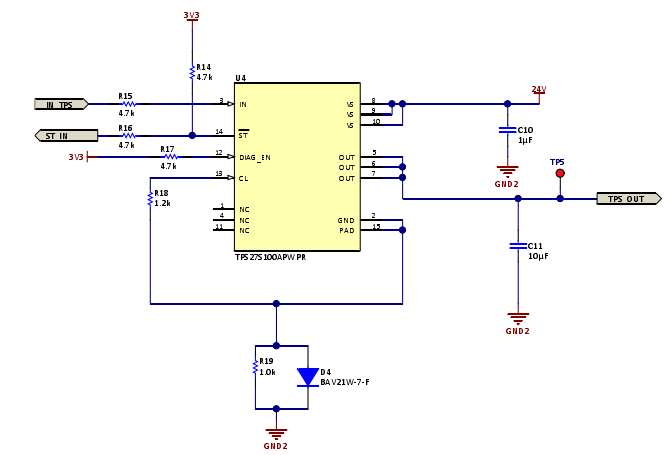
高侧开关TPS27S100电路的原理图
该开关通过24V外部电源供电。IN引脚是用于激活该开关的控件。输入信号由MCU提供。连接到CL引脚的电阻器会设置电流限值。
本设计旨在获得2A的电流限值。用于设置该限值的电阻器值可通过下列公式计算得出:

使能引脚(DIAG_EN)永久连接到3.3V电源轨,以实现持续诊断监控。FLT引脚是开漏诊断状态输出。电阻器R14是连接的上拉电阻器,用于获取数字信号输出。
FLT引脚会在检测到过流、短路、热关断或开路情况时变成低电平。输出引脚通过连接器J5连接至制动线圈的一端。R19和D4形成GND网络,以保护器件免受反向电流的损害。连接电阻器R15, R16和R17则是为了在过流情况下为MCU提供保护。
(4)低侧开关
本参考设计使用ULN2003A作为低侧开关,这是一个高电流达林顿晶体管阵列。下图显示了低侧开关的电路。
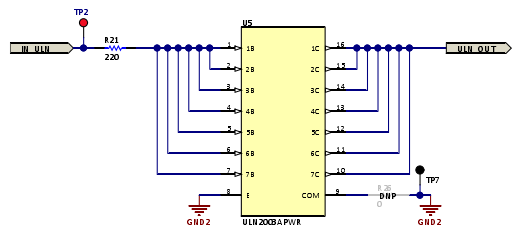
低侧开关U L N2003A电路的原理图
ULN2003A由7个达林顿晶体管对组成,每对都具有500mA的额定电流。所有晶体管对都是并联的,因此可提供更高的电流。用于激活该开关的输入信号由MCU提供。系统通过连接器J5将该开关的输出提供给制动线圈的另外一端。
(5)缓冲器电路
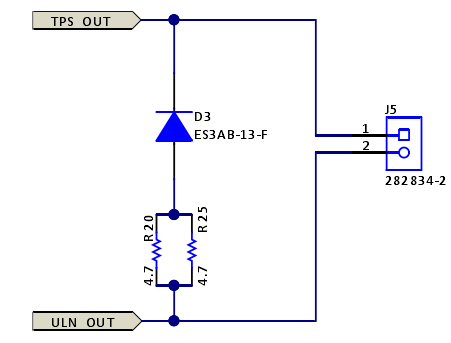
下图显示了跨过制动线圈连接的缓冲器电路。开关打开时,如果电流减少,线圈的电感就会产生反极性电压,这会损坏开关。
电阻器R20和R25均与通信二极管D3串连,它们又作为一个整体与制动线圈并联,以提高制动线圈的退磁速度,从而保护开关免受高反向电压瞬态的影响。
(6)来自制动线圈的电压反馈
制动线圈的电压反馈取自低侧开关,而后会通过数字隔离器馈送至MCU。该反馈过程是为了监控输出电压并据此调整低侧开关的输入PWM信号。
电阻分压器用于将电压从24V降低至3.3V,以将其馈送至MCU。下图显示了制动器电压反馈电路。
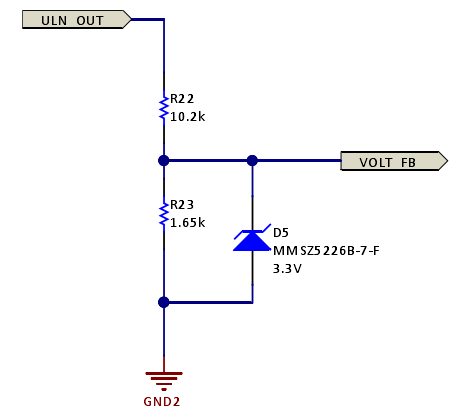
制动器电压反馈电路原理图
(7)电源
1)使用LMZ14201生成3.3V电压
LMZ14201是一个用于为初级侧供电的降压型直流/直流电源模块。此器件通常用于将较高的直流电压转换为较低的直流电压,最大输出电流为1A。本设计使用LMZ14201将24V输入电压转换为3.3V,从而为隔离器的初级侧和MCU供电。下图显示了LMZ14201的电路。
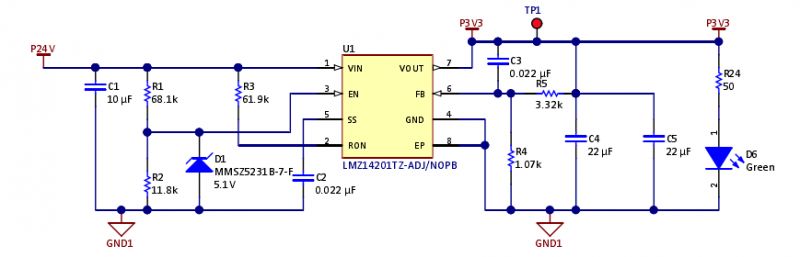
使用LMZ14201生成3.3V电压的原理图
输出电压由VO和地而之间连接的两个电阻器组成的分压器决定。分压器的中点连接至FB输入端。FB电压与0.8V内部基准进行比较。在正常运行状态下,当FB引脚上的电压降至0.8V以下时,将启动接通时间周期。
主要的MOSFET接通时间周期会导致输出电压升高,并导致FB上的电压超出0.8V。只要FB上的电压高于0.8V,接通时间周期就不会出现。
稳压输出电压由外部分压电阻器R5和R4决定:
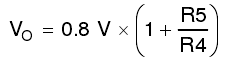
整理各项,可实现所需输出电压的两个反馈电阻器的比值为:
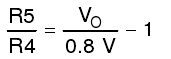
所选电阻器的阻值必须在1.OkS2至1 O.OkS2范围内。本参考设计使用3.32k的R5和1.07k的R4来生成3.3V的输出电压。
2)使用TPS7B6933生成3.3V电压
次级侧上的数字隔离器需要一个3.3V的电源来为其供电。因此,本设计中使用TPS7B6933将24V转换为3.3V,从而为隔离器的次级侧和高侧开关供申。下显示了TPS7B6933的申路。
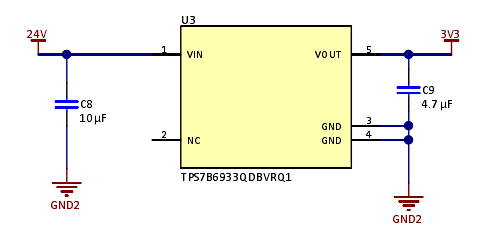
使用TPS7B6933生成3.3V电压的原理图
4.PCB概述
下图是PCB的俯视图。该图中突出标示了高侧和低侧开关。
PCB的俯视图
PCB布局建议:
下图分别显示了隔离层和接地划分。初级侧和次级侧铜轨通过隔离层彼此隔离。初级侧和次级侧之间保持着4mm的铜轨间爬电距离。两个20引脚连接器J3和J4相距20mm,可连接至C2000LaunchPad。电源平而被划分为3.3V和24V平面。
接地平面分为两个平面:GND1和GND2o GND1用作IS07142的初级侧和LM 14201器件的接地。GND2用作IS07142的次级侧、TPS27S100, ULN2003A和TPS7B6933器件的接地。
-
机器人
+关注
关注
211文章
28476浏览量
207413 -
连接器
+关注
关注
98文章
14557浏览量
136718 -
数字隔离器
+关注
关注
17文章
641浏览量
76368
原文标题:一文解析伺服驱动器及机器人的智能制动控制设计
文章出处:【微信号:elecfans,微信公众号:电子发烧友网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
工业机器人所用的电机驱动系统
伺服驱动器和机器人智能制动阐控制和诊断包括BOM及层图
安川机器人伺服电机维修,常见机器人伺故障服电机和维修方法
KUKA库卡机器人伺服驱动器相关型号举例
ABB机器人驱动器相关故障维修型号有哪些?
常年回收发那科机器人配件产品;回收发那科成套系统模块 回收伺服驱动器
求购发那科机器人配件;发那科伺服驱动器/全套系统模块高价上门回收
【方案分享】适用于伺服驱动器和机器人的智能制动控制和诊断方案
8.3安全机器人---抱闸测试解析





 工商网监
工商网监
评论