 无位置传感器控制方法,你掌握了吗?
无位置传感器控制方法,你掌握了吗?
01
磁链观测法电机磁链信号和转子位置直接相关, 因此可以通过转子磁链的值来确定转子位置信号。
但电机转子磁链不能直接检测得到。为了获得电机转子磁链值,必须先测量电机的相电压和电流, 建立不依赖于转子速度而与转子磁链直接相关的函数方程,计算磁链值。
这种方法计算量大,而相电压和电流中含有大量的干扰信号,准确测量又需要很高的软硬件成本,因此很少采用。
02
反电势过零检测法在无刷直流电机中,绕组的反电势通常是正负交变的,当某相绕组的反电势过零时,转子直轴恰好与该相绕组轴线重合,因此只要检测到各相反电势的过零点,就可获知转子的若干个关键位置,从而省去转子位置传感器,实现无位置传感器无刷直流电机控制。这是目前应用最广泛的无位置传感器 BLDCM 控制方法。
这种方法的缺点是静止或低速时反电势信号为零或很小,难以准确检测绕组的反电势,因而无法得到有效的转子位置信号,系统低速性能比较差,需要采用开环方法进行起动;另外,为消除PWM调制引起的干扰信号,需要对反电势信号进行深度滤波,这样造成与电机转速有关的信号相移,为了保证正确的换相需要对此相移进行补偿。
03
反电势三次谐波积分法由于BLDCM的反电动势为典型的梯形波,它包含了基波及其高次谐波分量,通过对电枢三相相电压的简单叠加,就可以获得3次谐波及其奇数倍谐波,可以从中提取反电动势的3次谐波分量,并进行积分,积分值为零时即得功率器件的开关信号。
反电动势3次谐波信号的获取有两种方式:一种利用电机中性点和并联于电机三相绕组端的星形电阻的中性点来得到反电动势的3次谐波分量;在没有中性点引出的电机,可以利用直流侧中点电压和星形电阻网络的中性点来获得反电动势的3次谐波分量;然后对获得的信号进行滤波,滤掉3次谐波的高次分量,由于高次分量的最低为9倍的基波频率,对滤波器要求低。
因而它比反电动势直接过零比较有更宽的运行范围。这种方法避免了逆变器开关造成的干扰,但是3次谐波的幅值小于反电势的幅值,不易检测,特别是低速的情况下,3次谐波信号更弱,难以获得转子位置信号。
04
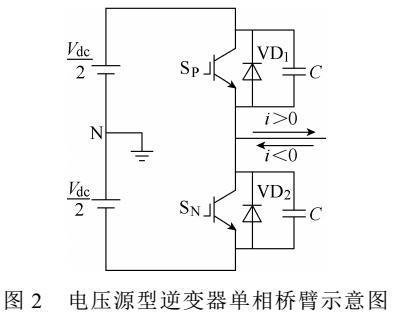
续流二极管法这种方法是通过监视并联在逆变器功率管两端的自由换向二级管的导通情况来确定电机功率管的换向时刻。BLDCM 三相绕组中总有一相处于断开状态, 于是通过监视6个续流二级管的导通关断情况就可以获得6个功率管的开关顺序。
该方法可以提高电机的调速范围,特别是可以拓宽电机的调速下限。但是这种方法要求逆变器必须工作在上下功率管轮流处于PWM斩波方式,增大了控制难度;另外,对于续流二极管导通的无效信号和毛刺干扰造成的误导通信号的去除也不易实现。
这种方法也存在着较大的检测误差,反电势系数、绕组电感量不是常数、反电势波形不是标准的梯形波等都会造成转子位置误差。由于这种方法需要在二极管上并联检测电路,这对于集成的功率器件(如IPM)很难实现。
正因为以上种种缺点,所以这种方法在国内应用并不是很广泛,相对来说技术也不是很成熟。
05
电感法电感法有两种形式:一种是用于凸极式永磁无刷直流电机,另一种是用于内嵌式磁钢结构的永磁无刷直流电机。第一种电感法主要是通过在起动过程中对电机绕组施加探测电压来判断其电感的变化。
在凸极电机中,绕组自感可表示成绕组轴线与转子直轴间夹角的偶次余弦函数,通过检测绕组自感的变化,就可判断出转子轴线的大致位置,再根据铁心饱和程度的变化趋势确定其极性,从而最终得到正确位置信号。
这种方法难度较大,且只能应用于凸极电机,所以现在较少应用。与第一种方法相比,第二种方法才是真正意义上的电感法。
在内嵌式永磁无刷直流电机中,绕组电感会因为转子位置的改变而发生相应变化,通过检测这些变化,再经过一定计算,即可得到转子位置信号。该方法中,需要对绕组电感进行不间断的实时检测,增加了实现的难度,应用不是很广泛。
06
状态观测器法“状态观测器法”的基本思想就是以电机的转速、转子位置角、电流等参数为状态变量,在定义状态变量的基础上对电机建立数学模型,通过数字滤波的方法得出状态变量的离散值,从而实现对电机的控制。
“状态观测器法”比较好的解决了电机在高速、重载情况下难于控制的问题,其良好的抗干扰能力使其更适用于恶劣的工作环境。“状态观测器法”庞大的运算量在一定程度上限制了它的应用。这种方法一般采用数字信号处理器(DSP)来承担庞大的运算量,因而增加了系统成本,在实际应用中并不多见。
-
二极管
+关注
关注
147文章
9631浏览量
166329 -
电感
+关注
关注
54文章
6136浏览量
102303 -
电机转速
+关注
关注
0文章
63浏览量
11368
发布评论请先 登录
相关推荐
无位置传感器的电机控制资料分享
无刷直流电动机的无位置传感器控制
舰船电机无位置传感器控制
面装式永磁同步电机驱动系统无位置传感器控制






 工商网监
工商网监
评论