 Trinamic推出首款闭环PANdrive,可实现可靠的电机和运动控制
Trinamic推出首款闭环PANdrive,可实现可靠的电机和运动控制
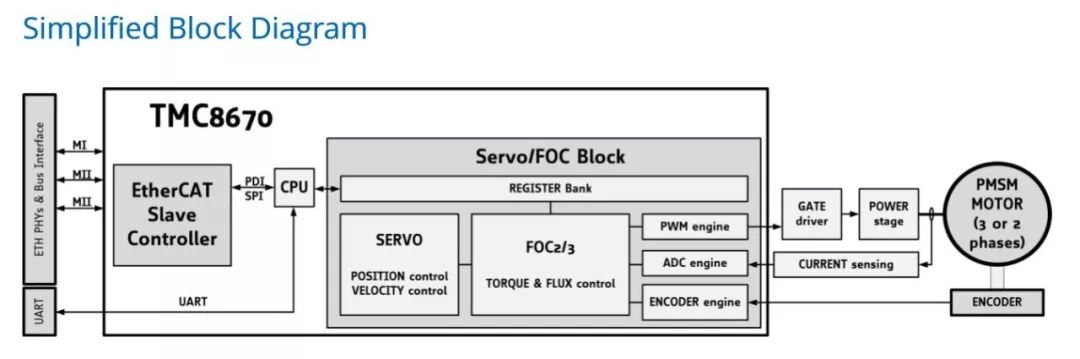
TMC8670是一款磁场定向控制(FOC)伺服控制器,具有CANopen over EtherCAT?协议栈,可以比任何基于软件的解决方案都更快地处理实时关键任务。
2018年8月13日,德国汉堡,TRINAMIC运动控制公司结合了TMC8670的所有优势:它集成了所有算法,可实现高端,快速的磁场定向控制和高性能实时现场总线接口。 TMC8670适用于三相BLDC和BLAC电机以及两相步进电机,融合了数十年的电机控制经验。
“我们看到EtherCAT在嵌入式自动化领域获得了相关性,该领域严格的空间限制推动了小型化的发展” Trinamic的创始人兼首席执行官Michael Randt解释道, “该组件在设计时考虑到了精确和动态的机器人驱动,其中控制器和伺服驱动器分布在接头中。自从我们几年前为KUKAs制造驱动电子设备以来,越来越多的小型,分散式机器人设计出现在市场上,此类机器人需要节省空间和高性能的解决方案。“TRINAMIC 运动控制公司结合了TMC8670的所有优势:它集成了所有算法,可实现高端,快速的磁场定向控制和高性能实时现场总线接口。 TMC8670适用于三相BLDC和BLAC电机以及两相步进电机,融合了数十年的电机控制经验。
TMC8670是一款用于机器人,制造和自动化的单轴嵌入式伺服控制器,设计工作电压为1.2V至3.3V。 TMC8670具有SPI-ADC接口,位置插值器和不同的位置传感器接口,是一种高性能构建模块,可实现仅具有几个组件的实时伺服控制器。它适用于机器人和工业自动化以及嵌入式运动控制系统中使用的典型编码器。
凭借包含空间矢量脉冲宽度调制(SVPWM)的PWM引擎,该集成电路适用于要求苛刻的低电感电机和最高动态定位任务。由于所有控制环路都在专用硬件中实现,因此TMC8670可以比任何基于软件的解决方案更快地执行实时关键任务,并将开发时间降至最低。
TMC8670-BI采用FCSG325(11x11)封装。该器件和评估板TMC8670-EVAL可从2018年9月开始发货。该器件符合-40°C至125°C汽车级温度规范。
特点和效益:
磁场定向控制(FOC)伺服控制器
扭矩控制(FOC),速度控制,位置控制
传感器引擎(霍尔模拟/数字,编码器模拟/数字)
支持3相PMSM和2相步进电机
PWM引擎,包括SVPWM
具有CoE协议CiA 402驱动器配置文件的EtherCAT®接口
UART接口
-
电机
+关注
关注
142文章
9003浏览量
145352 -
运动控制
+关注
关注
4文章
579浏览量
32861
原文标题:【世说芯品】Trinamic推出专用的EtherCAT运动控制器
文章出处:【微信号:Excelpoint_CN,微信公众号:Excelpoint_CN】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
深度解析一款高集成智能硬件伺服电机驱动控制芯片TMC9660
脉冲全闭环EtherCAT运动控制器的固件升级

什么是伺服电机 闭环霍尔电流传感器的应用
PLC如何完成闭环控制及逻辑控制
极海推出首款GHD3440电机专用栅极驱动器
凌华科技推出首款基于Intel GPU的显卡—A380E
如何在三天内实现高性能伺服电机驱动控制开发支持EtherCAT/CANopen协议栈

Melexis推出首款采用Triphibian™技术的压力传感器芯片MLX90830
U-tec宣布推出首款带指纹读取器的锁闩智能锁
英特尔在2024年CES上推出首款软件定义汽车SoC芯片
您可能不知道的ADI Trinamic(L-Maxim)产品






 工商网监
工商网监
评论