 鲁棒控制器在四轮独立转向电动汽车上的应用
鲁棒控制器在四轮独立转向电动汽车上的应用
1前言
近年来,自动驾驶技术已成为智能交通系统中用来减少交通问题的新兴研究热点。路径跟踪是自主地面车辆(AGV)的基本功能和主要任务。设计的路径跟踪控制器被要求能够使车辆以较小的跟踪误差跟踪目标路径,包括侧向偏移和航向误差。
与前轮转向车辆相比,四轮转向车辆具有出色的机动性,操纵稳定性和路径追踪能力,因此它更适合被作为自主地面车辆(AGV)使用。由于四轮转向车辆的路径跟踪问题比前轮转向车辆的路径跟踪问题更复杂,因此目前四轮转向车辆的路径跟踪控制策略仍然相对有限。
本文提出了一种新型的带有线控转向系统的四轮独立转向电动汽车,并设计了用于路径跟踪的控制器。通过MATLAB / Simulink数值仿真比较所设计的μ综合+ 4WIS + DYC与LQR + 4WIS + DYC两种路径跟踪控制器性能。目的是设计一种先进的控制器,以改善路径跟踪能力,并获得良好的抗参数摄动和外部干扰的鲁棒性。
2四轮独立转向电动车构型
本团队提出并制造了一种新型的4WIS(四轮独立转向)电动车,如图1所示。为了实现四轮独立转向,4WIS电动汽车由四个SBW(线控转向)系统组成。从图2可以看出,SBW系统是转向系统和悬架系统的集成设计,主要由转向电机、蜗杆减速器、减震器、转向盘转角传感器等组成。车轮可通过减速器、上滑动柱、上摆动臂、下摆动臂和下滑动柱围绕由所述转向电机驱动的主销旋转。利用方向盘转角传感器实时测量各轮的转向角信号,进行路径跟踪控制。表1显示了4WIS EV的结构参数。
图1 4WIS EV
图2 SBW系统:1,蜗杆和齿轮减速器;2,转向马达;3,上摆动臂;4,减震器;5,弹簧;6,下摆动臂;7,下滑动柱;8,上滑动柱;9,车轮转向角传感器
表1 4WIS EV的结构参数

3建模
四轮独立转向电动汽车动力学模型
在这一部分中,将4WIS EV的动力学模型简化为2自由度的单轨模型。如图3所示,只考虑侧向和横摆运动,以尽量减少建模的复杂性,假设纵向速度为u,单轨模型有三个输入:前转向角δf、后转向角δr和附加横摆力矩ΔMz。单轨模型的非线性动力学方程如下:
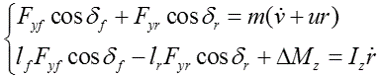
其中v是车辆的侧向速度,r是车辆的横摆角速度,Fyf和Fyr分别是前后的侧向轮胎力。
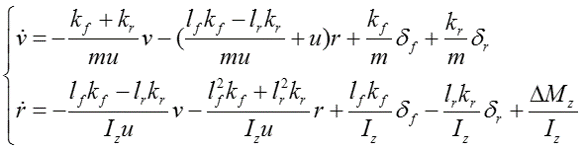
在控制器设计中,假设轮胎滑移角很小,轮胎力与轮胎滑移角成线性关系,于是有:

将上述两个方程的后者带入前者,则信号轨迹模型的动力学方程可表示为:
路径跟踪
图3为4WIS EV的路径跟踪模型。xy为车身坐标系,xdyd坐标系表示其目标路径上的车辆方向。
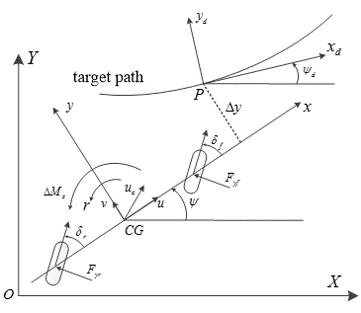
图3 4WIS EV路径跟踪动力学模型
在本文中,路径跟踪问题等价于最小化侧向位置误差和横摆角误差,这两个误差可以表示为:
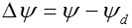
取一个关于时间的导数,上述方程可以重写为:
ρ为目标路径的曲率半径。
侧向位置误差的导数推导如下:
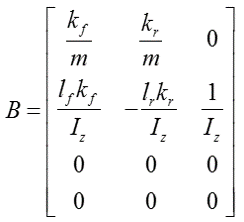
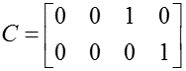
结合前面几个方程,4WIS电动汽车路径跟踪的动力学方程可以写成状态空间形式:
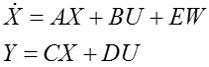
状态向量 ,控制输入向量
,控制输入向量 和外部输入向量
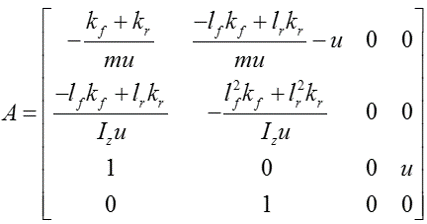
和外部输入向量 ,系数矩阵A,B,C,D和E由下给出:
,系数矩阵A,B,C,D和E由下给出:


4鲁棒控制
在路径跟踪过程中,车辆速度和轮胎侧偏刚度等参数不能始终保持不变。此外,侧风、变径曲率等外部扰动也是不可避免的。结果表明,4WIS EV的路径跟踪性能严重恶化.因此,有必要设计一种对参数扰动和外部扰动具有良好鲁棒性的控制器。在此基础上,设计了一种基于μ综合方法的鲁棒控制器。
鲁棒控制闭环系统
用于路径跟踪的4WIS EV鲁棒控制闭环系统如图4所示。该系统主要由G模型、控制器K和其他性能对象元素组成。
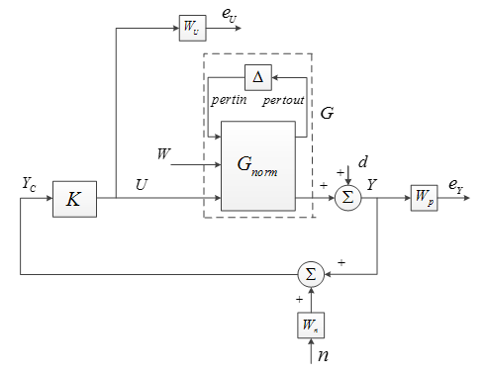
图4 用于路径跟踪的4WIS EV鲁棒闭环系统
模型G是一个摄动模型结合标准模型Gnorm不确定块Δ。G可以以上线性分式变换(LFT)的形式表示为 。不确定块Δ反映了速度和轮胎侧偏刚度的参数不确定性,是一个对角矩阵且范数有界
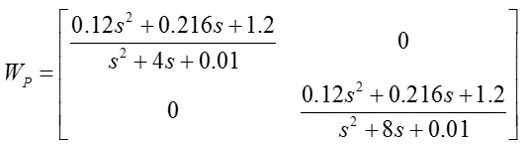
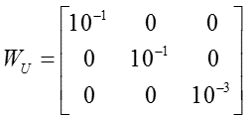
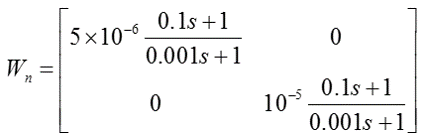
。不确定块Δ反映了速度和轮胎侧偏刚度的参数不确定性,是一个对角矩阵且范数有界 , 闭环系统具有三个输入:路径信息W、外部干扰d和测量噪声n。输出eU和eY用于评价闭环系统的鲁棒性。加权函数WU和WP反映了U和 Y的性能输出, 权重函数Wn反映了不同频域对测量噪声的影响n。为了达到预期的鲁棒性能,选择了适当的加权函数,并将它们表示如下:
, 闭环系统具有三个输入:路径信息W、外部干扰d和测量噪声n。输出eU和eY用于评价闭环系统的鲁棒性。加权函数WU和WP反映了U和 Y的性能输出, 权重函数Wn反映了不同频域对测量噪声的影响n。为了达到预期的鲁棒性能,选择了适当的加权函数,并将它们表示如下:
μ综合与D-K迭代
在图5中,P(s)表示由名义模型和加权函数组成的19个输入和17个输出开环系统的传递函数矩阵。用于路径跟踪的4WIS EV的广义系统如图6所示。
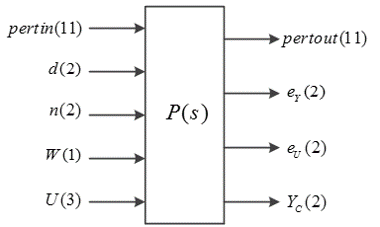
图5 用于路径跟踪的4WIS EV鲁棒控制开环系统
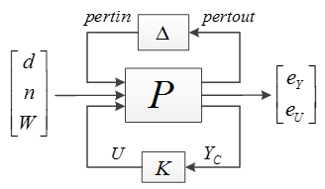
图6 用于路径跟踪的4WIS EV广义系统
对于鲁棒性能分析,不确定的块ΔP结构定义为:

第一个不确定块Δ用来描述参数扰动,第二个不确定块是一个虚拟的不确定性块ΔP,它是利用μ综合方法来表示鲁棒性能要求的。块ΔP的输入是eU和eY,块ΔP的输出是d,n和W。
为了达到鲁棒的性能要求,需寻找一个稳定控制器K(S),使结构奇异值对于每个频率满足以下条件:

其中FL(P,K)是P和K的下线性分式变换,为了解决上述方程中的问题,采用了D-K迭代法。考虑到:

其中DΔP是任何一个满 ,
, 且遵循DΔP=ΔPD的矩阵集。
且遵循DΔP=ΔPD的矩阵集。
于是,方程中的问题就等价于:

5仿真分析
在所设计控制器的基础上,利用MATLAB/SIMULINK中的9自由度非线性车辆模型,对4WIS电动汽车的路径跟踪进行了数值仿真。仿真结构图如图7所示。四轮转向角δfl,δfr,δrl,δrr是基于Ackerman转向几何关系与单轨模型的δf和δr推导得到。在仿真中分别进行了单移线和双移线两种工况,对所提出的控制器的路径跟踪性能进行了评估。车辆的名义参数列于表1。
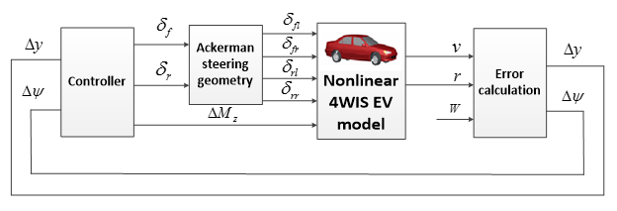
图7 仿真结构图类
最优控制器与鲁棒控制器对比仿真
在此仿真情况下,4WIS EV在不考虑参数扰动的情况下,以20m/s的速度进行单移线变换机动,对比最优和鲁棒控制器。这里使用表1中的4WIS EV的名义参数。图8(A)、(B)和(C)描述了最优控制器和鲁棒控制器的输出,从中可以看出鲁棒控制器的前轮转向角和后轮转向角都小于最优控制器。然而,它们的附加横摆力矩曲线显示出相似的变化趋势和幅度。可以推断,控制器输出的大小将对以后的路径跟踪精度产生重要的影响。图8(D)和(E)显示车辆状态、侧向速度和横摆角速度。鲁棒控制器的侧向速度比最优控制器小得多,但横摆角速度相差不大。两个控制器的路径跟踪结果如图8(F)、(G)和(H)所示。结果表明,鲁棒控制器对横摆角和侧向位置的路径跟踪误差具有较小的超调响应和较低的稳态误差,这表明鲁棒控制器的路径跟踪性能优于最优控制器。
(a)
(b)
(c)
(d)
(e)
(f)
(g)
(h)
图8 单移线变换策略的仿真结果:(a)前轮转向角;(b)后轮转向角;(c)附加横摆力矩;(d)侧向速度;(e)横摆角速度;(f)横摆角误差;(g)侧向位置误差;(h)路径跟踪结果
鲁棒性能
这个仿真实例的目的是评估之前提出的鲁棒控制器的鲁棒性。在不同的纵向速度和摩擦系数下,四轮独立转向电动车实行双移线变道策略。
图9表明了在不同道路下双移线变道策略的结果,(结冰道路μ=0.3,湿路μ=0.6,干路μ=0.9)。从图9(a)、(b)、(c)中可以看出,在高摩擦系数下控制器输出的峰值低于低摩擦系数下的峰值,且低摩擦系数下的波动更为显著。在不同道路条件下的侧向速度和横摆角速度分别示于图9(d)、(e)。可以看出随着摩擦系数的增加,侧向速度和横摆角的振幅减小。图9(f)、(g)显示横摆角和侧向位置的跟踪误差,从中我们能够清楚地看出,结冰路面条件下路径跟踪误差比高摩擦系数路面条件下的更大。不同道路条件下的实际路径在图9(h)中进行了比较。很明显,四轮独立转向电动车在高摩擦路面条件下具有较好的路径跟踪性能。然而我们还发现,即使是低摩擦系数路面情况的路径跟踪绝对误差也很小,这意味着所设计的控制器在不同的路面状况下具有很强的稳定鲁棒性和良好的性能鲁棒性。
(a)
(b)
(c)
(d)
(e)
(f)
(g)
(h)
图9 考虑不同摩擦系数的双移线变道策略的仿真结果:(a)前轮转向角;(b)后轮转向角;(c)附件横摆力矩;(d)侧向速度;(e)横摆角速度;(f)横摆角误差;(g)侧向位置误差;(h)路径跟踪结果
在设计控制器前,假定车辆的纵向速度为恒定。然而,这并不能在实际中实现。为了解决这一问题,在鲁棒控制器设计过程中考虑了纵向速度的摄动。图(10)显示了不同纵向速度(u=10m/s,u=20m/s,u=30m/s)下双移线变道策略的仿真结果。考虑到不同的纵向速度导致了通过目标路径的时间不同,在这种情况下的仿真结果参考纵向位移而不是时间,以便于更好地显示。
图10(a),(b),(c)显示了由鲁棒控制器产生的控制信号,从中我们可以观察到高的纵向速度导致了高峰值和大的波动。就侧向速度和横摆角速度而言,我们可以从10(d)和(e)中得出相似的结论。可以发现在车辆状态中存在多个波动,这是由系统扰动引起的。图10(f)和(g)示出了横摆角和侧向位置的路径跟踪误差,这表明路径跟踪误差随着纵向速度的增加而增大。在图10(h)中比较了不同纵向速度下的实际路径。虽然车辆纵向速度发生变化,但路径跟踪性能不会严重变差。
(a)
(b)
(c)
(d)
(e)
(f)
(g)
(h)
图10 考虑不同纵向速度的双移线变道策略的仿真结果:(a)前轮转向角;(b)后轮转向角;(c)附件横摆力矩;(d)侧向速度;(e)横摆角速度;(f)横摆角误差;(g)侧向位置误差;(h)路径跟踪结果
6结论
本文提出了一种新型的具有线控转向系统的四轮独立转向电动车,为了解决四轮独立转向电动车的路径跟踪控制问题,利用μ综合方法设计了鲁棒控制器。在控制器设计过程中,考虑了参数摄动、变路径曲率和噪声测量。利用Hankel范数逼近,实现了鲁棒控制器的降阶。基于名义模型,通过单移线工况进行最优和鲁棒控制器的路径跟踪性能比较,结果表明鲁棒控制器具有更好的路径跟踪能力。为了评估鲁棒控制器的鲁棒性,在不同的道路条件和纵向速度下进行了双移线变道仿真案例。仿真结果表明,所设计的鲁棒控制器具有很好的路径跟踪性能,对严重的参数摄动和外部扰动具有足够的稳定鲁棒性和良好的性能鲁棒性。验证设计的控制器性能的最佳方法是实验,所以我们未来的工作重点是图1所示的四轮独立转向电动车的实际测试,目前控制相关的硬件和传感器的测试正在开展。
-
电动汽车
+关注
关注
156文章
12182浏览量
232225 -
自动驾驶
+关注
关注
784文章
13924浏览量
166885
原文标题:四轮独立转向电动汽车路径跟踪的鲁棒性控制
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
SAF-C164CI-LM用于电动汽车控制器SCH(原创)
电动汽车电机
北京首辆私人纯电动汽车上路
金升阳电动汽车电源设计参考
如何高效评价电动汽车的驱动电机与控制器?
电动助力转向系统控制器的设计方案
电动汽车整车控制器(VCU)技术及开发流程剖析
四轮独立驱动电动车高速CAN网络数据分析技术


基于CAN总线通讯技术实现汽车四轮独立驱动控制系统的设计






 工商网监
工商网监
评论