 基于单神经元的PID控制实现
基于单神经元的PID控制实现
介绍了一种单神经元自适应控制的方法,并提出了在线调整的方法。该方法结构简单,便于在分散控制系统中实现。
0 引言
在工业过程控制中,PID控制是历史最悠久、生命力最强的控制方式。这主要是因为这种控制方式具有直观、实现简单和鲁棒性能好等一系列优点。在火电厂分散控制系统中,单输入单输出(SISO)、采用PID控制规律、简单的控制回路一般占80%以上。但是,许多热工对象都具有大时延、大惯性的特性,使得过渡过程时间变长,调节品质变差;另外,对于高阶或多变量强耦合过程,PID的整定与控制都存在困难。由于整定条件常常受到限制,以及对象的动态特性随着工况、环境等变化而发生变化,PID参数往往难以达到最优状态。
为此,本文提出一种单神经元自适应控制的方法。通过大量的仿真实验表明,该方法简单易行,具有比普通PID算法好得多的控制效果。
1基于单神经元的自适应控制
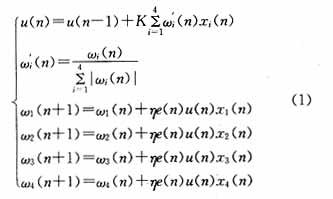
神经元的输入信号由4部分组成:前馈控制信号x1(t)、反馈比例控制信号x2(t)、反馈微分控制 信号x3(t)、反馈积分控制信号x4(t)。它是一种多层次多模式的控制结构,集前馈和反馈于一体,互为关联,互为补偿。前馈控制信号x1(t)通过ω′1(t) 直接作用于受控对象,加快了系统的响应速度;x2(t)能迅速减小跟踪误差;x3(t) 可以改善系统的响应速度,减小超调量;x4(t) 使系统趋近于稳态无差,提高了控制的准确性。权值ω′i(t)(i=1,2,3,4)反映了受控对象和过程的动态特性,神经元通过自身的学习策略不停地调整ω′i(t)(i=1,2,3,4),在4种控制的关联作用下迅速消除偏差,进入稳态。
权值调整方法采用有监督Hebb学习算法[2],同时为了保证学习算法的收敛性和控制的鲁棒性,可采用规范化的学习算法。控制算法如下式:
2仿真实验研究
进行单神经元自适应控制仿真实验,实验结果见图2。PID的参数Ti、δ和Td是通过寻优得到的最优参数。在t=0.56 s时加了一个内扰。可见单神经元自适应控制比普通PID控制响应速度快,控制效果好。
大量的仿真实验表明,单纯调节学习速率η对控制效果的影响不明显。K是神经元的比例系数,它对开环放大倍数较大的受控对象,可以起到衰减神经元控制效果、消除学习过程的冲击的作用;而对开环放大倍数较小的受控对象,则可以起到增强神经元控制效果、保证神经元在全局范围内搜索到E{[r(t)-y(t)]2} 的最小值的作用。仿真实验表明,K取的较大时,系统动态启动快,但超调量大,调整时间长;K取的较小时,系统响应变慢,超调量下降,但如果K取的太小,则响应跟踪不上给定信号。
对K的分析表明,应当在响应初期取较大的值,以提高响应速度;而在进入稳态以后,K应逐步减少到某一稳定值,以保证系统不出现过大的超调量。为了满足上述要求,可以采用非线性变换法对K进行在线修改,调整公式如下:

式中,K0为K的稳态值;α为待定参数,其值视控制效果进行调整。取偏差的3次方是使偏差较大时K较大,增加响应速度,而偏差较小时,后一项几乎不起作用,以减小超调量。
也可以采用如下简单的分段线性化方法来调整K:

对无自平衡对象G(s)=(0.325s+1)-1×(0.5s+1)-1 进行单神经元自适应控制仿真实验,实验结果见图3。在t=5.6 s时加一个内扰。可见控制的响应速度进一步加快。
3结论
以上提出的神经元自适应预测PID控制器,能够提高控制系统的自适应能力和鲁棒性,该控制器结构简单,易于实现,特别是便于在分散控制系统中实现。
-
PID控制
+关注
关注
10文章
461浏览量
40466 -
神经元
+关注
关注
1文章
368浏览量
18556
发布评论请先 登录
相关推荐
神经元芯片的主要特点和优势
神经元是什么?神经元在神经系统中的作用





 工商网监
工商网监
评论