 关于位置式PID控制系统结构分析
关于位置式PID控制系统结构分析


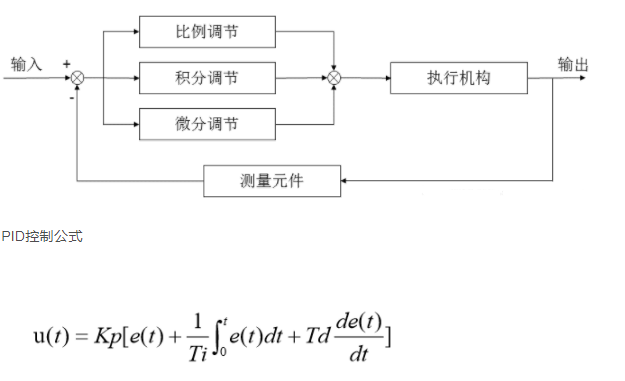
其中,Kp为比例系数,Ti为积分时间常数,Td为微分时间常数,u0是边差为O时的控制作用,是控制量的基准,如原始阀门开度、基准电压等。
在控制中,计算机只能根据采样时刻的偏差值计算控制量,因此上式中的积分和微分项都不能直接使用,需要进行离散化处理。即将描述连续系统的微分方程代之以等效的描述离散系统的差分方程,得到相应的数字PID调节器。
连续时间r用一系列的采样时刻点盯代替,采用矩形法进行数值积分,以求和代替积分,以差分代替微分,得到相应的离散PD表达式。为书写方便,将e(k)简化成e(k)得到位置式算式:

k:采样信号,k=0,1.2。
u(k):第庀次采样时刻的计算机输出值。
e(k):第庀次采样时刻输入的偏差值。
e(k-1):第(k-1)次采样时刻输入的偏差值。
Ti;:积分时间常数。
Td:微分时间常数。
位置式PID控制系统结构图如图所示。
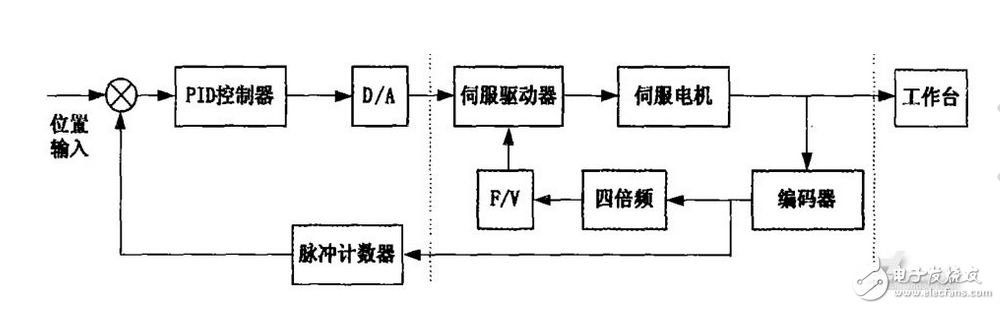
图 位置式PID控制系统
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制系统
+关注
关注
41文章
6997浏览量
114539 -
PID控制
+关注
关注
11文章
465浏览量
42685
发布评论请先 登录
相关推荐
热点推荐
用LaBVIEW实现步进电机PID控制系统
和图标/连接器。图3为步进电机控制系统前面板,图4为步进电机控制系统框图程序。从框图程序中可知,整个程序结构是一个while循环,其内部结构分为4个模块:数据采集及数字滤波模块;
发表于 04-09 09:40
教你用C语言实现位置式PID和增量式PID
,对那些噪声较大的系统一般不用微分, 或在微分起作用之前先对输入信号进行滤波。ⅢPID算法代码 PID 控制算法可以分为位置
发表于 05-30 08:00
位置式PID控制算法研究
由51单片机组成的数字控制系统控制中,PID控制器是通过PID控制算法实现的。51单片机通 过AD对信号进行采集,变成数字信号,再在单片机中
发表于 03-16 15:26
•153次下载
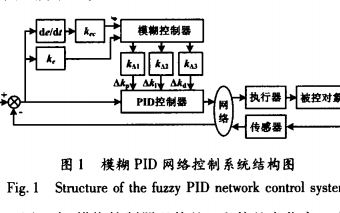
模糊PID网络控制系统有什么作用详细的仿真分析资料概述
为了研究网络控制系统的特性,结合PID结构简单、稳定性好和模糊控制适应性强的特点,设计了模糊PID网络
发表于 12-27 08:00
•5次下载
什么是PID?位置式PID与增量式PID有何不同
PID 实指“比例 proportional”、“积分 integral”、“微分 derivative”,这三项构 成 PID 基本要素。每一项完成不同任务,对系统功能产生不同的影响。它的
如何使用PID控制算法优化控制系统
当涉及到控制系统中的精确调节和稳定性,PID(比例-积分-微分)控制算法是一种不可或缺的工具。本文将简单介绍 PID 控制算法,从基本概念到



评论