 简述变频调速系统对于SVPWM控制的一种设计
简述变频调速系统对于SVPWM控制的一种设计

引 言
目前,变频调速技术经过多年的研究已经趋于成熟,尤其是普通的SPWM方案已经普遍应用于实际的变频器中。其他控制方法如空间电压矢量法、直接转矩控制等策略的研究也已经进入了一个新的阶段。空间电压矢量PWM(Space Vector PWM,SVPWM)控制方法通过电压矢量的控制优化使磁通逼近基准磁链圆,从而产生恒定的电磁转矩,其控制效果等同于直接转矩控制。从电机的角度出发,把逆变器和电动机作为一个整体来考虑。与传统PWM相比,其电流畸变小、直流电压利用率高,在传动系统和变频电源装置中有着广泛应用。
1 变频调速系统结构
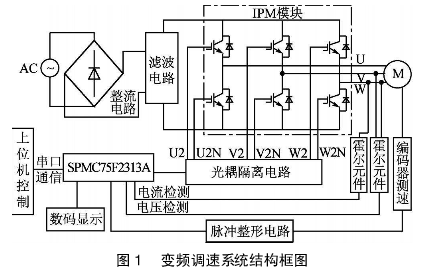
图1为整个变频调速系统的结构框图。系统由整流电路、滤波电路、智能功率模块(IPM)、单片机(SPMC75F2313A)、光耦隔离电路、脉冲整形电路、过压过流检测电路及显示电路等部分组成。整个系统由VB编写的友好界面通过上位机进行控制,可正反转起停,还可实现在线调速、测速,对电压电流进行监测等功能。
1.1 SPMC75F2313A单片机
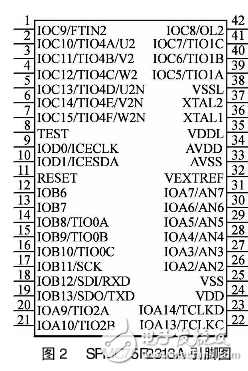
变频调速系统的控制内核为凌阳的16位单片机SPMC75F2313A,适用于体积小、嵌入式的变频系统。其内部集成有专用于位置侦测的接口,以提高电机伺服系统的定位精度。DIP封装引脚图如图2所示。其中,TCLKD和TCLKC引脚分别接光电编码器的A、B相。
1.2 FSBB20CH60智能功率模块
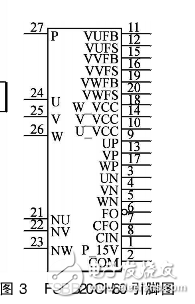
功率驱动部分主要由IPM模块和光耦隔离电路组成。IPM模块选用美国仙童公司生产的FSBB20CH60,引脚图如图3所示。该模块适用于三相DC/AC功率变换,内部集成了过压过流、欠压欠流及热保护等功能。光耦隔离由6路高速光耦6N137构成,其作用是将单片机产生的SVPWM波与驱动电路隔离,防止波形受到干扰从而影响输出电压波形。
1.3 脉冲整形电路
如图4所示,+5V(A)不同于+5V(B),GND(A)也不同于GND(B),二者不共地,其原因在于光耦6N137的两侧不能共地,否则达不到隔离的目的,还可抑制电源侧对信号输出侧的电磁干扰,能够得到更优秀的A、B相波形。
由ST公司的运放LM339组成的迟滞比较器,其主要优点是抗干扰能力强,当输入信号受干扰或噪声的影响而上下波动时,适当调整比较器的输入电平差值即可避免比较器的输出电压因干扰或震动而发生改变。输出状态一旦转换后,只要在跳变电压值附近的干扰不超过△U之值,输出电压的值就将是稳定的;但随之而来的是分辨率降低,因为对迟滞比较器来说,它不能分辨差别小于△U的两个输入电压值。迟滞比较器加有正反馈可以加快比较器的响应速度,还可避免由于电路寄生耦合而产生的自激振荡。
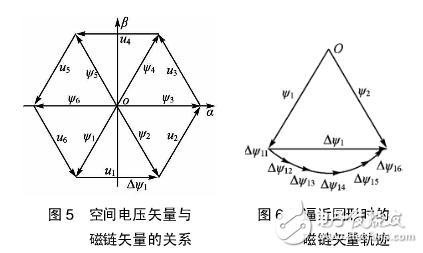
逆变的每相桥臂有两种开关电平(+ud和-ud),因此每周期逆变器共8种工作状态。其中首尾两种状态是冗余的,状态切换后分别形成6个空间电压矢量和、磁链矢量,如图5所示。如果想获得更多或逼近圆形的旋转磁场,须在每个π/3时间内出现多个工作状态,以形成更多相位不同的空间电压矢量。图6绘出了逼近圆形时的磁链矢量轨迹。如果每周期只切换6次,当电压为u1时,磁链增量为u1△t=△ψ1,磁链轨迹呈六边形。不同空间电压矢量在不同时间作用下的线性组合就可得到所需相位的磁链增量。增加开关切换次数可使磁链逼近圆形,如图6中的磁链增量由△ψ11、△ψ12、△ψ13、△ψ14、△ψ15、△ψ16六段组成。△ψ11是u1和u6在不同作用时间下合成的,即

其中,t1、t2为作用时间;T0为采样周期。
2 SVPWM软件实现
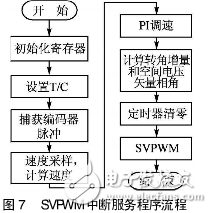
SVPWM中断服务程序流程如图7所示。测速编码器将测得脉冲经整形电路后送入单片机,再经过PI调节,设置定时器,在每次速度采样的时间内计算转角增量和空间电压矢量的相角,进行SVP-WM波的调制。 此开放式教研系统还加入了二级控制系统,通过设置Twido PLC参数可对各个系统分别控制,也可由上位机直接控制。
用Matlab仿真得出电机三相线电压和转速曲线图,如图8和图9所示。
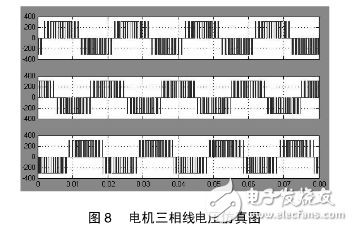
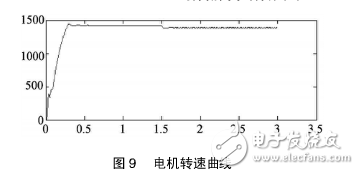
从仿真结果可以看出,逆变器输出的线电压是按正弦规律变化的,转速在启动后稍有波动,之后一直处于稳定的状态,从而证明对SVPWM调制算法的分析是正确的。
结 语
本文利用SPMC75F2313A和FSBB20CH60智能功率模块构成了变频调速系统的主要部件,采用优秀的SVPWM调制技术,通过对空间电压矢量的控制逼近磁链圆,使其输出转矩恒定,有效地降低了开关损耗和交流侧的谐波畸变率,提高了直流侧电压利用率。目前,该调速系统已经成功地应用于实验室的教学和研究。
-
变频器
+关注
关注
256文章
7454浏览量
155928 -
变频调速系统
+关注
关注
0文章
39浏览量
10055 -
SVPWM控制
+关注
关注
0文章
26浏览量
5895
发布评论请先 登录



评论