 采用模糊控制与PID控制结合提高液压位置伺服系统的控制精度
采用模糊控制与PID控制结合提高液压位置伺服系统的控制精度

1. 引言
当今,在工业、国防等自动化领域,液压伺服系统以其重量轻、体积小、产生力矩大等优点而得到广泛应用。但由于漏油、油液污染等因素影响,液压伺服系统中普遍存在参数时变、非线性尤其是阀控动力机构流量非线性等现象。随着对控制精度要求的提高,对液压伺服控制技术也提出了越来越高的要求。传统PID控制很难达到满意的控制效果,针对这一问题,近年来出现了许多不同的现代控制策略,如神经网络控制、自适应控制、模糊控制、预测控制等。这些控制方法在理论上取得很大进步,但是在液压伺服控制中还有一些实际问题需要解决。
模糊控制不需要被控对象的精确数学模型,并且可以引入专家经验,因此有较好的实用性。但单独使用模糊控制不易消除稳态误差,且对控制器运算性能要求较高,而PID算法简单又可以较好的消除稳态误差。对此,本文采用模糊控制与PID控制结合,利用模糊控制实时修正PID参数,提高了系统的控制精度和鲁棒性,有较好的实用性。
2. 液压位置伺服系统
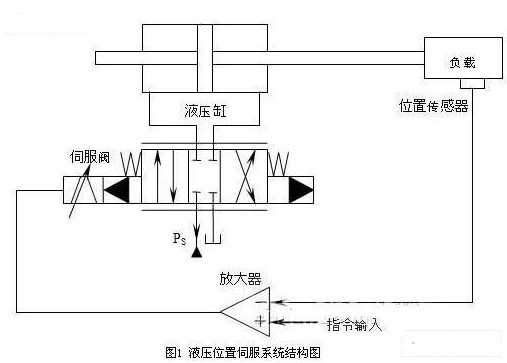
图1 液压位置伺服系统结构图
如图1所示,该液压位置伺服系统由放大器、电液伺服阀、液压缸、负载以及位置传感器等组成。输入信号经放大后送入电液伺服阀,小功率电信号经由伺服阀转化为阀芯位移信号,然后转换成流量和压力等液压信号,这些信号最后驱动液压缸带动负载完成指定动作。
因电液伺服阀实现了电液信号的转换和液压功率放大两个功能,故电液伺服阀在伺服系统中起桥梁的作用,是系统的心脏,本文中位置伺服系统采用动铁力矩马达喷嘴挡板式两级电液伺服阀。
根据力矩马达的电压、磁路和运动方程,喷嘴挡板位移与马达的偏角关系以及主阀 (对称四通滑阀)的运动方程和流量方程,可以推导出电液伺服阀传递函数如下:

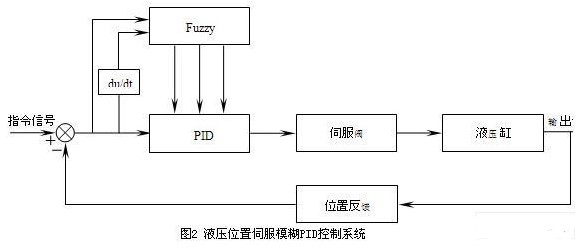
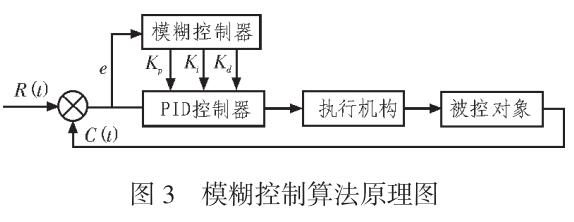
通过上述推导得到液压位置伺服控制系统中液压被控部分的数学模型(1)(2),然后在使用PID控制的基础上经过模糊控制修正PID的比例、积分和微分三个参数,这样就可以保证系统在不同状况下都处于最优状态,从而提高了系统控制精度、有较好的实时性与鲁棒性。如图2所示为设计的液压位置伺服模糊 PID控制系统方框图。
3. 模糊PID控制
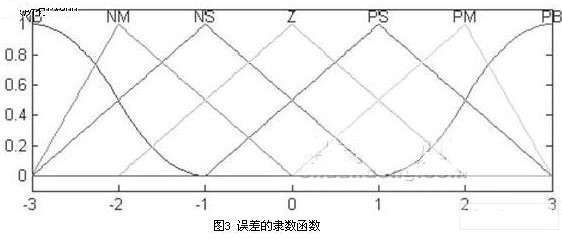
本文使用模糊控制方法实现对PID参数的在线调整,模糊控制的输入为误差 和误差变化率 ,输出为PID三个参数的调整量△kp 、△ki和△kd。根据液压位置伺服系统设定 的基本论域为[0.6,0.6], 的基本论域为[0.3,0.3],其对应模糊论域均取为{-3,-2,-1,0,1,2,3},故量化因子 现取误差e和误差变化率ec的模糊集E, EC={NB,NM,NS,Z,PB,PM,PB},且其隶属度函数均如图3所示:
模糊控制的输出△kp 、△ki和△kd的模糊论域分别为{-3,-2,-1,0,1,2,3}、{-0.06,
-0.04,-0.02,0,0.02,0.04,0.06}、{-0.3,-0.2,-0.1,0,0.1,0.2,0.3},并且其模糊集均为{NB,NM,NS,Z,PB,PM,PB}。三个输出变量的隶属函数同输入误差 和误差变化率 相同,都用三角函数,在此不一一列出。
在对精确量进行模糊化后,根据各量的模糊集和隶属函数,采用MAX-MIN模糊推理可以分别推导出模糊输出变量△kp 、△ki和△kd的模糊规则表,其中很重要的一点是必须根据理论知识和工程经验考虑PID三个参数的作用及相互间的关系。
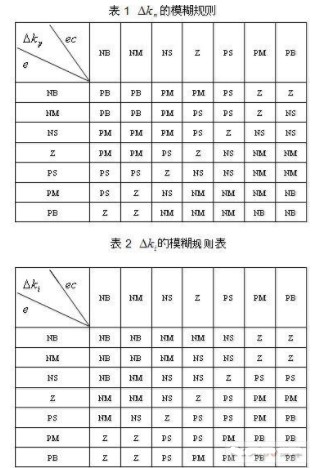
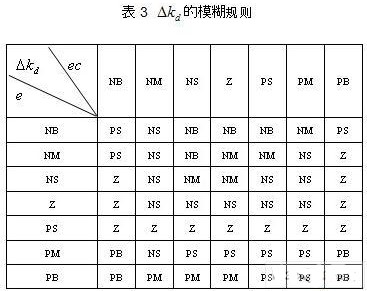
根据表1、2、3的模糊规则推理出的模糊输出量,通过反模糊化即可得到PID三参数的实际精确量,从而实现对PID的在线调整。为实现更好的模糊控制效果,本文使用取中位数的反模糊化方法。

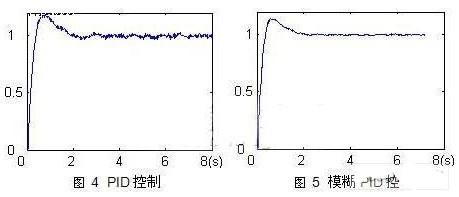
控制与模糊PID控制的阶越响应仿真模型,并加入幅值为1的白噪声干扰来仿真模型的时变。仿真波形如下图:
5. 结论
仿真结果显示,PID设定参数相同的情况下,加入模糊控制实时修正PID的参数,可以更好的控制被控对象。由图4、图5可以看到,PID参数一旦固定,在时变状况下的适用性受到很大制约,而模糊PID通过在线自调整参数,使控制性能一直保持在最优状态下,有更好的控制精度和鲁棒性。此外,在调整模糊控制参数时,应特别重视量化因子与比例因子的作用。
-
放大器
+关注
关注
146文章
14361浏览量
222460 -
PID
+关注
关注
38文章
1505浏览量
91874 -
功率
+关注
关注
14文章
2130浏览量
75980
发布评论请先 登录



基于带修正因子模糊PID控制的PMSM交流伺服系统

模糊PID控制对伺服系统性能改善的研究



评论