 利用磁阻传感器和AT89C52单片机实现机器人玩具控制系统的设计
利用磁阻传感器和AT89C52单片机实现机器人玩具控制系统的设计
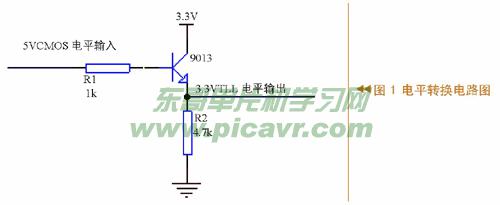
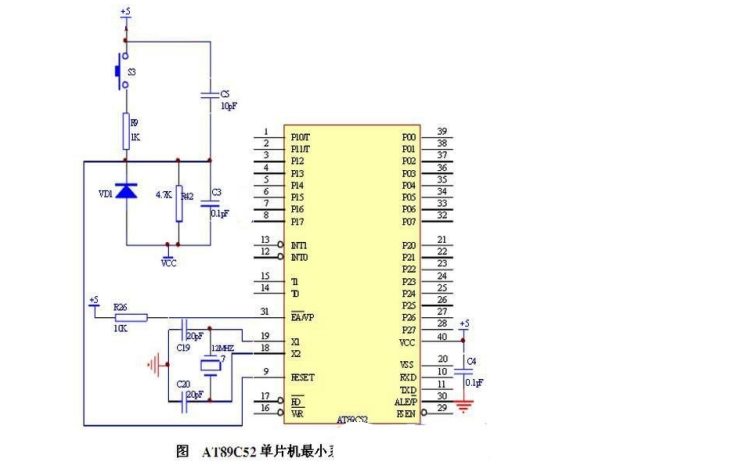
芯片,只完成与通信、运算等有关的主要操作,在没有操作时,由运行于其上的操作系统uClinux来维护。对于所有与EZ328的核心运算、控制、通信、操作无关的外围设备的维护和控制都通过一块AT89C52来完成,它与EZ328的底层通信协议为同步串口协议(SPI),在AT89C52中由软件来实现。C52包含的部件主要是A/D转换器,键盘接口,电机驱动模块。硬件结构电路图如下图1:
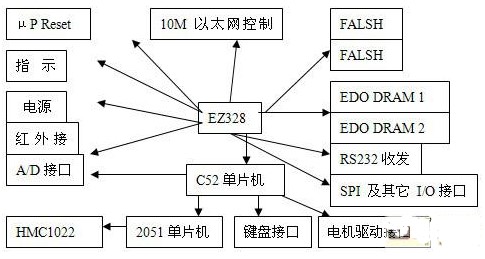
图1
1 磁阻传感器及其详细采集过程
1.1 磁阻传感器HMC1022简介
利用磁路中磁阻的变化,将被测量变化转换成交流电压变化的传感器。它的机构是四臂的惠斯通电桥,将磁场转化为差动输出的电压,可以检测低至85微高斯的磁场信号,这种低成本的传感器相比传统型号的同类产品具有更小的体积和更低的功耗。供电电源为3V-10V直流电压。本设计中采用的HMC0122采用的是16脚SOIC封装,集成了两路的惠斯通电桥,测出平面的X轴和Y轴的磁场信号,这样就可以获得水平面上方向的完整信号。
比较特殊的是Honeywell公司的这种磁阻传感器带有一个获得专利的置位/复位电路。
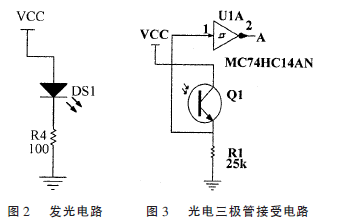
图2和图3分别是HMC1022内部电桥和置位/复位电路电路设计。
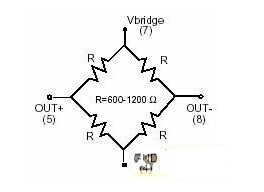
图2
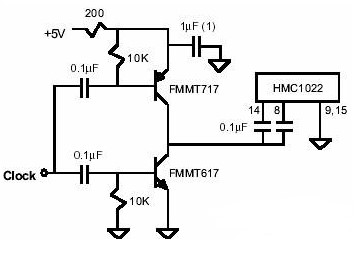
图3
1.2 磁阻传感器工作原理
物质在磁场中电阻发生变化的现象称为磁阻效应。对于铁、钴、镍及其合金等强磁性金属,当外加磁场平行于磁体内部磁化方向时, 电阻几乎不随外加磁场变化;当外加磁场偏离金属的内磁化方向时,此类金属的电阻值将减小, 这就是强磁金属的各向异性磁阻效应利用标准的半导体工艺, 将薄膜附着在硅片上时。当沿着铁磁合金带的长度方向施加一个电流,在垂直于电流的方向施加一个磁场时,合金带自身的阻值会发生最大的变化。同时制作时还在硅片上设计了两条铝制电流带,一条是置位/ 复位带,该传感器遇强磁场感应时,将产生磁畴饱和现象,此偏置磁场带用来磁畴排列的复位(即恢复灵敏度) ,也可用来置位或复位输出的极性; 另一条是偏置磁场带,用来产生一个偏置磁场以补偿环境磁场HMC的输出电压为磁场强度为0时传感器的输出。所以当U0为0时, Uout正比于磁场强度B.
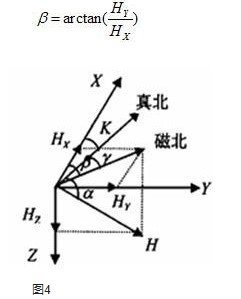
如图4,假设机器人处于水平面上,X为机器人行进方向,Y为水平面上垂直X的方向向右,地里北极方向和地磁北极方向如图所示。H为地磁场,Hx、Hy分别是H在X、Y方向的水平分量, β为机器人行进方向和地磁北极方向的夹角, γ为地磁北极和地理北极方向的夹角,K就是机器人行进方向与地理北极方向之间的夹角,也就是我们最终要求的角度。
1.3 磁阻传感器信号采集模块电路设计
从HMC1022输出的电压信号非常微弱,我的测试是0到3mv,需要经过放大器的放大,放大器选用的是AN622,放大倍数选定为600倍,这种放大器可以加上一个2.5v的偏置电压,所以输出到A/D的电压为2.5v+(0~3mv)*600,两路采集到的电压信号经过放大后连接到ADC0832.ADC0832是个两通道8位精度的逐次逼近式模数转换芯片,通过一个串行的I/O口DI输入一个MUX ADDRESS序列,来配置A/D成差分方式并选择哪一路通道的信号。
用max662a作为RST/SET部分的恒压源,电路的工作原理及流程如下:
1. 由2051的14端(P1.7)输出高电平,SR电路set功能选通
2. 通过2051 P1各相应端子控制ADC0832,完成一次A/D转换,记下此次读入的电压值Vset .
3. 2051的P1.7输出低电平,SR电路reset功能选通
4. 通过2051 P1各相应端子控制AD0832,完成一次A/D转换,记下此次读入的电压值Vrst
5. 求出1022的输出偏置电压V0=(Vset+Vrst)/2.
6. 通过2051控制AD0832完成A/D转换,将每一次读入的值Vrst减去V0就得到计算需要用的电压Vread=Vrst-V0
7. 求得
8. K=β-γ, goto 6
经过2051处理后得出的数值,在时钟的配合下用一个I/O口模拟PWM输出,传给C52单片机。
2 结束语
整个电路设计作为机器人玩具的可加载模块,在实际使用中的效果很好,对方向的分辩率完全满足在5度以内,把处理所得的结果传递给主控制芯片。已在实际中使用,且获得了满意的效果。从性价比来看,这种电路设计是比较成功的设计。
-
传感器
+关注
关注
2545文章
50433浏览量
750908 -
芯片
+关注
关注
452文章
50179浏览量
420648 -
机器人
+关注
关注
210文章
28086浏览量
205787
发布评论请先 登录
相关推荐
基于AT89C52单片机的多超声信号融合处理系统设计

AT89C52单片机的SD卡读写设计
使用AT89C52单片机进行最小系统的接口电路免费下载
使用AT89C52单片机和反射式传感器设计实现智能巡线机器人的资料说明






 工商网监
工商网监
评论