 分析直角坐标机器人中配视觉系统的应用
分析直角坐标机器人中配视觉系统的应用
当今,随着社会的全面发展,对机器人的要求越来越高,机器人高度智能化已成为热点研究问题。视觉控制是机器人智能化的重要实现方法,其利用视觉得到大量的环境信息,通过智能化分析自主规划行为,实现智能控制。神经网络能够模拟复杂的函数关系,可作为机器人的智能控制核心。另外,互联网技术高度发展,充分利用丰富的网络资源,把网络融入到机器人技术中,将是机器人智能化的一个重要发展方向。在深入的研究相关理论之后,本文首次提出了基于网络的直角坐标机器人视觉伺服系统结构。 机器人视觉控制的研究涉及到多学科的内容,如图像处理、运动学、动力学、控制理论、计算机高级语言编程等。本文在计算机网络的环境下,利用视觉传感器CCD摄像机得到的图像作为反馈信息,再传送到机器人运动控制器,实现了直角坐标机器人的位置闭环控制,即视觉伺服(Visual Servo),其中运动控制器的核心采用BP神经网络。
一、直角坐标机器人的定义及主要特点
机器人按ISO 8373定义为:位置可以固定或移动,能够实现自动控制、可重复编程、多功能多用处、末端操作器的位置要在3个或3个以上自由度内可编程的工业自动化设备。这里自由度就是指可运动或转动的轴。直角坐标机器人是以直线运动轴为主,各个运动轴通常对应直角坐标系中的X轴,Y轴和Z轴。在绝大多数情况下直角坐标机器人的各个直线运动轴间的夹角为直角。
直角坐标机器人主要由一些直线运动单元,驱动电机,控制系统和末端操作器组成。针对不同的应用,可以方便快速组合成不同维数,各种行程和不同带载能力的壁挂式、悬臂式、龙门式或倒挂式等各种形式的直角坐标机器人,从简单的二维机器人到复杂的五维机器人就有上百种结构形式的成功应用案例。从食品生产到汽车装配等各行各业的自动化生产线中,都有各式各样的多台直角坐标机器人和其它设备严格同步协调工作,可以说直角坐标机器人几乎能胜任所有的工业自动化任务。下面是其主要特点:
1 任意组合成各种结构样式,带载能力和尺寸的机器人,
2 采用多根直线运动单元级连和齿轮齿条传动,可以形成几十米的超大行程机器人。
3 采用多根直线运动单元平连及各带多滑块结构时其负载能力可增加到数吨。
4 其最大运行速度可达到每秒8米,加速度可达到每秒4米。
5 重复定位精度可达到0.01mm~ 0.05mm。
6 采用带有RTCP功能的五轴或五轴以上数控系统能完成非常复杂轨迹的工作。
二、德国VC视觉系统简介
机器视觉就是使机器有人眼和大脑的部分功能,能自动进行几何形状测量,印刷质量缺欠识别和产品外观质量识别等工作。机器视觉系统通常用在全自动化、高效可靠和非接触的大批量生产过程中的检测识别工作。常见的视觉系统一般包括:光源、镜头、CCD摄相机、图像采集卡、图像处理软件、监视器、通讯/输入输出单元等。而许多智能相机就是一个通用图象处理系统,把镜头、图象传感器、高速DSP、存储器、常用图像处理软件、通讯口和/输入输出口等集成在一个香烟盒大小的盒内,用户可以任意编程,能代替基于PC机的图象处理系统。智能相机有彩色智能相机和黑白智能相机,有线阵和面阵智能相机,本文仅介绍一款德国VC公司面阵黑白CCD智能相机。
工作时首先CCD智能相机将被摄取目标转换成灰度图像信号,先放大该信号,再数字化为数字图像。数字图像以二维矩阵存储起来,如Vision Components GmbH公司智能像机VC2028的每一幅数字图像都是640*480的二维矩阵。该矩阵的每一个元素叫像素,它的数值通常是0~255。像素的数值0~255对应目标的最暗和最亮处。图像处理软件就是根据图像中像素分布和亮度变化等信息抽取图像中目标的特征,如:孔的数量、面积、形状、长度、形状宽度和位置等,还可以是亮度变化等,然后与所存的模板进行比较匹配,最后给出尺寸、角度、偏移量、个数、合格/不合格、有/无等结果。
机器视觉系统是指通过机器视觉产品(即图像摄取装置,分CMOS和CCD两种)把图像抓取到,然后将该图像传送至处理单元,通过数字化处理,根据像素分布和亮度、颜色等信息,来进行尺寸、形状、颜色等的判别。进而根据判别的结果来控制现场的设备动作。
用户可以在PC机上用C语言或VC编写自己的应用程序,然后下传到智能相机里,智能相机运行该程序来完成特定的任务。也可以选用VC公司配带的图象处理软件。
三、机器人数控系统
该机器人的控制系统采用德国运动控制技术公司(Movtec)的三轴运动控制卡DEC4T和运动控制软件Editasc。DEC4T运动控制卡是基于PC机,专用控制3台步进电机和数字伺服电机的运动控制卡。EdiTasc不仅是MOVTEC公司各种控制卡配套的通用数控软件,它也是一个高度开放的开发平台,可以直接控制各种工业自动化设备,或方便的开发用户专用页面及控制系统。DEC4T自带36路数字输入输出口,来作为限位开关,控制CCD智能相机和起动检测仪器。
德国MOVTEC公司DEC4T步进/数字伺服电机控制卡
运动控制器的工作方式
运动控制器要插在PC机的总线插槽上。常用的有针对ISA总线和PCI总线的两种运动控制器,两者不能互换。运动控制器上有控制步进电机和/或模拟伺服电机的控制信号端子,多路数字输入/输出口,多路模拟输入/输出口等。 针对运动控制器开发的运动控制软件在PC机上运行。它由低层运动控制软件和用户操作界面两部分组成。低层运动控制软件告诉运动控制器进行直线和圆弧等插补运动所需的所有参数,及对I/O口进行操作,同时接受运动控制器上返回的运动状态及输入口状态等参数。运动控制器按刚接到收的指令自行控制步进电机或模拟伺服电机进行插补运动及对I/O口进行操作。用户操作界面把操作员与低层运动控制软件连接起来,输入所有运动参数,控制运动过程及显示各种运动状态等。 由于运动控制器自己独立工作,PC机在控制运动控制器的同时,可以运行其它的软件。I/O口可以很方便的扩展,如接配电子轮和编码器信号输入等。在PC机主频为100MHz时,3轴连动圆弧插补周期大约为0.5ms。当PC机主频提高时,插补周期更短,中断时间可以设为更短,使机器运动更加平稳,实时监控I/O口。
EdiTasc是TRIMETA公司为其各种控制板卡配套的通用数控软件。它不仅是一个包含钻床,铣床,镗床,雕刻机和加工中心控制功能的理想数控软件,也是一个高度开放的开发平台,可以直接控制各种工业自动化设备,可以方便的开发用户专用页面及控制系统。
EdiTasc是在WINDOWS下实时运行、汉化的通用数控系统软件,识别国际标准的DIN 66025 G代码和高级语言MTASC。EdiTasc由低层运动控制软件和用户操作界面两部分组成。低层运动控制软件可实时准确地告诉运动控制卡进行直线和圆弧等插补运动,可以对所需的所有参数进行设置,也可以对I/O口进行操作。在进行直线插补运动时低层运动控制软件按设定的时间段周期性地告诉运动控制卡有关运动轴运行的速度和长度。在这一小周期内有关各运动轴按各自所要求的速度运动到所要求的长度。系统采用预读功能,预读程序段数设为最多可达149段。采用预加速/减速来保证切削矢量速度恒定或平稳过度。
在周期性地告诉运动控制卡有关运动轴运行的速度和长度的同时,低层运动控制软件接收运动控制卡上返回的运动轨迹位置,如各个轴在这一时间段内(如0.5ms)实际上走的长度。低层运动控制软件还能自动计算位置偏差,并根据这一差值对位置偏差进行PID调节,以保证精确运动。运动控制卡按刚接收的指令自行控制步进电机或模拟伺服电机进行直线插补运动及对I/O口进行操作。
Editasc可采用Mtasc语言或G代码编程,Mtasc语言为Editasc专用语言,具有如下一些特点:
· 任意定义各种长度、多种类型的变量和数组 ;
· 许多数学函数;
· 多种循环程序;
· 多种条件
· 允许有任意层扩展和嵌套;
· 调用子程序和调用其它语言的子程序;
· 极其方便的I/O口操作。
· 在程序的输入和编辑过程中可以执行任意一行或几行程序,可方便地验证程序及数据的合理性。
四、几个典型应用
1、产品标签检验
在几乎所有的现代化批量生产过程中,产品包装盒上所印文字、符号、产品上的标签等要求印刷精美,无任何缺陷和错误。但实际中会出现下面的问题,如部分字符漏印,部分字符不完整,不同字符间混乱,要解决上面的问题就必须选一优秀的图象处理系统,对这些文字和符号进行100%的可靠的检验,才能保证100%的合格率,达到真正的“零缺陷”。被检验识别的文字和符号可以由下面的方式产生:印刷,喷码,热转印和激光雕刻等。
本文CCD相机选用德国Vision Components公司智能摄像机VC2038。其配置如下:CCD芯片是Sony 1/2” 640*480点,每秒25桢图像,存储器配置是16 MB SDRAM, 2 MB Flash Eprom, 8 bit overlay, CPU是TMS320C62XX,速度是1200MIPS (每秒1200百万指令)。VC2038通过自带RS232口 可以把位置数据传给PC机。VC2038还自带4路数字输入口和4路数字输出口。根据视场范围和高度选用对应的镜头。
RS232接口是1970年由美国电子工业协会(EIA)联合贝尔系统、调制解调器厂家及计算机终端生产厂家共同制定的用于串行通讯的标准。它的全名是“数据终端设备(DTE)和数据通讯设备(DCE)之间串行二进制数据交换接口技术标准”。 该标准规定采用一个25个脚的DB25连接器,对连接器的每个引脚的信号内容加以规定,还对各种信号的电平加以规定。随着设备的不断改进,出现了代替DB25的DB9接口,现在都把RS232接口叫做DB9。
被检验的产品在传送带上单排排放或如图1所示的并列排放。机器人首先停止传送带,并把检测头移动到第一个产品上方,识别系统开始自动检测识别第一个产品。机器人再把检测头移动到第二个产品上方,接着识别系统开始自动检测第二个产品,如此依次识别完该排最后一个产品。再启动传送带把第二排产品移到检测系统正下方,并开始该行产品的自动检验识别。
2、印刷品质量检验
这里的任务是图2产品的检验。在图2中被检验的产品是透明塑料上的文字。机器人首先停止传送带,并匀速移动检测头,识别系统在几个特定的位置自动检测识别所印文字和符号。塑料再起动一定长度,机器人反向运动,检测系统开始该行产品的自动检验识别。
机器人是德国百格拉公司单轴机器人,由于负载小及移动速度要求不高,故选用型号为LM-P404 R-AT5,有效行程按任务要求选为1500毫米,驱动电机是百格拉公司的步进电机VRDM3910LWB,机器人控制系统选用百格拉公司的专用工控机TLCC。TLCC通过CAN总线控制TLC611步进电机驱动器。图像处理系统选用德国Vision Experts公司的检测系统 VE 4000 OCV/2。图2是该系统在实际使用中的照片。
德国Vision Experts公司的E 4000 OCV/2系统由智能CCD摄像机VC2038和专利识别软件组成,可以检测各种符号。可以100%保证发现所有下面的问题:整个或部分字符漏印,不完整字符,不同字符间混乱,如5和6、6和9印混了,字符位置不对,字符的字体不对或不一致。该系统可以识别多种符号,当图像中要识别的符号与背景的对比度有些变化。该系统也非常灵活,可以一分钟仅检测10个产品,也可以一小时检测10万个产品;可以同时检测300个字符,也可以检测同时含10种字体的符号集合。被检测产品可以被旋转,实现在运动中实时动态检测,E 4000 OCV/2系统自动给出检测数据,有自检和外部信号启动公式,检测的符号可以缩小或放大,给出符号的位置数据。
3、工件识别定位及抓取
随着自动化生产能力的提高,现代工厂中经常会出现需要分类分拣的场合,那么就非常需要配合视觉系统的机器人来实现这项工作。该例子为对仓库中不同批次的产品进行定位及抓取。在机器启动前,操作人员根据具体需求,通过计算机将需要搬运的产品的批次传输给视觉系统,当机器人带动视觉系统到达产品上方时,视觉系统通过获取的图像进行识别,通常识别物为条码,当确认该产品为需要搬运的产品,那么视觉系统再通过获取的图像进行精确定位,将坐标值传输给机器人,机器人随后运动到指定位置,进行抓取搬运。如果检测该产品不是需要搬运的产品,那么传输给机器人相应的信号,机器人移动到下一工件位置进行下一次检测。
该系统中的视觉系统同样采用德国Vision Components公司智能摄像机VC2038,机器人采用德国百格拉直角坐标机器人,控制系统采用的为德国MOVTEC公司运动控制卡,这样能够保证在一台计算机中对视觉系统与直角坐标机器人的控制与配合。
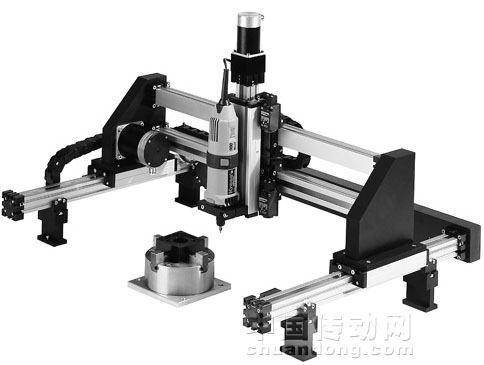
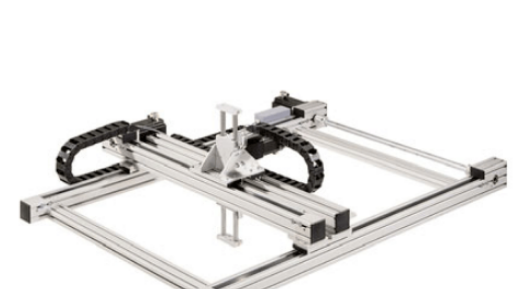
德国百格拉直角坐标机器人
定义: 在直角坐标机器人中各个轴主要是做直线运动,而且运动方向通常是相互垂直的,所以叫直角坐标机器人。直角坐标机器人可分为一维到多维很多种,每一维是一个运动轴,由一个直线运动单元组成。直线运动单元按其功能又分为龙门轴和抓取轴。龙门轴
技术数据: 行程0-18 m
负载: 1-400 kg
重复定位精度: 0.02 mm
最大速度 :8m/s
传动方式: 齿型带、齿条和滚珠丝杠传动
驱动电机: 步进电机和伺服电机(配NEUGART精密行星减速机可以增大出力和减少负载的转动惯量)。
特点: 主要部分采用特制高强度高直线度的铝型材, 型材内部配有特殊的钢轨来保证机械强度和长期保持平行度,同时也是运动滑块的载体。滑动方式分为光杠滚轮轴承导轨和密封轴承导轨;优点是钢性好、磨擦系数小、阻力低、精度高。
应用: 焊接、搬运、上下料、包装、码垛、拆垛、检测、探伤、分类、装配、贴标、喷码、打码、(软仿型)喷涂等
4、视觉系统引导的灌装机械
目前机器人已经应用到了各个领域,以下我们介绍机器人在灌装机械中的使用。如图4所示,在一些工厂中需要对液态产品大量的进行灌装以方便运输,所以自然就增加了对灌装机的需求,附图中为视觉引导的直角坐标机器人在灌装机中的应用。机器人方面选用德国百格拉龙门式三维直角坐标机器人,视觉方面选择德国Vision Components公司智能摄像机VC4038E。
该系统是通过BLOB区域分析的方法来进行桶口的位置确定。由于每个桶口的正上面都有一个与铁桶本身颜色区分明显的白点和黑洞,那么视觉系统就采用区域分析的方法对采集的图像进行处理,获得该白点和的黑洞位置,然后通过换算确定桶口的位置,并通过以太网口传输给直角坐标机器人。机器人获得该坐标后,直接带动注油管道到桶口上方,然后插入,注油,待结束后重复执行以上的动作。
该系统成功的解决了工厂注油难,费时,费力等困难,大大提高了工作效率。这里面机器人的运动轴要带金属防护带,所用的驱动电机是防爆电机。
结论及展望
德国Vision Components公司的智能相机装配在百格拉公司的直角坐标机器人上已经被众多用户成功地用在工件定位,分类搬运上。 随着大批量自动化生产的迅猛发展,很多产品要在许多生产环节全面被检测及精确定位,这类直角坐标机器人和图像处理系统将具有更加广范的市场前景和发展潜力!
-
机器人
+关注
关注
211文章
28466浏览量
207296 -
视觉系统
+关注
关注
3文章
335浏览量
30757 -
图像采集卡
+关注
关注
1文章
95浏览量
9645
发布评论请先 登录
相关推荐
直角坐标机器人如何选型
这些机器人视觉系统些关键技术,你必须要知道
直角坐标机器人在汽车发动机涂胶机上的应用
德国BAHR直角坐标机器人在无损探伤设备的应用
直角坐标机器人和关节机器人的特性及应用对比
直角坐标机器人的定义及主要特点
浅谈无损检测行业中直角坐标机器人的运用
直角坐标机器人的结构组成及在铝锭搬运中的应用
直角坐标机器人&关节机器人的区别详解
机械手的直角坐标|多关节|圆柱坐标|极(球)坐标式运行方式简述
直角坐标机器人&amp;关节机器人的区别详解

机械手的直角坐标|多关节|圆柱坐标|极(球)坐标式运行方式简述





 工商网监
工商网监
评论