 采用超声波测距和单片机实现雨量液位测量系统的设计
采用超声波测距和单片机实现雨量液位测量系统的设计

引言
降水量是衡量一个地区在某段时间内降水多少的数据。降水量就是指从天空降落到地面上的液态和固态(经融化后)降水,没有经过蒸发、渗透和流失而在水平面上积聚的深度。它的单位是毫米。降水根据其不同的物理特征可分为液态降水和固态降水。液态降水有毛毛雨、雨、雷阵雨、冻雨、阵雨等,固态降水有雪、雹、霰等,还有液态固态混合型降水:如雨夹雪等。"降水量"是气象术语,按气象观测规范规定,气象站在有降水的情况下,每隔六小时观测一次。6小时中降下来的雨雪统统融化为水,称为6小时降水量;24小时降下来的雨雪统统融化为水,称为24小时降水量;一个旬降下来的雨雪统统融化为水,称为旬降水量……一年中,降下来的雨雪统统融化为水,称为"年降水量"其中,气介式是指探头安装在被测液面上方,超声波的传播介质为气体。因为气介式安装较其他几种方式最为方便灵活,故本系统设计采用气介式超声波传感器。然而在传统的超声波测量方法中常使用温度传感器测量,若在单片机中存表实现补偿,既增加了成本,也无法达到很高的精度要求,同时也无法实现远程通信的目的。针对上述问题,本系统设计给出了方案。
1 超声波测量的基本原理
超声波传感器是利用超声波的特性研制而成的传感器。超声波是一种振动频率高于声波的机械波,由换能晶片在电压的激励下发生振动产生的,它具有频率高、波长短、绕射现象小,特别是方向性好、能够成为射线而定向传播等特点。超声波对液体、固体的穿透本领很大,它可穿透几十米的深度。超声波碰到杂质或分界面会产生显着反射形成反射成回波,碰到活动物体能产生多普勒效应。
根据声学原理,当声波从一种介质向另一种介质传播时,在两种密度不同、声速不同的介质界面上,会发生反射和折射。其反射率为:

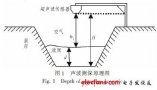
当声波传播到水面时,R≈1.超声波测距是通过不断检测超声波发射后遇到的障碍物所反射的回波来测出发射和接收回波的时间差△t,然后求出距离S.测量雨量液位是属于测量面与点距离的性质,液位、换能器与换能器所在测量参考平面之间存在一个角度,其测量如图1所示。
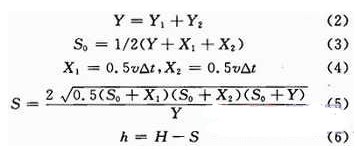
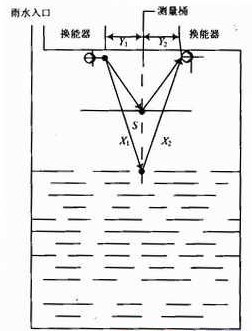
式中:Y是换能器(R40和T40)之间的距离;So为测量三点构成的几何图形面积;X1为R40到测量反射点之间的距离;v为超声波在上层介质中传播的速度;△t为从发射到接收一次的传播时间;S为测量桶顶部距离液位的距离;H为桶顶部距离底部的距离;h为液位高度。
2 系统设计
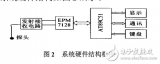
本系统主要由AT89S52单片机、超声波发射和接收电路、进水排水及测量控制电路系统、报警电路及显示电路、上位机通信电路、外围保护电路等环节组成。具有实时测量雨量、存储雨量信息、与上位机通信等功能。系统框图如图2所示。
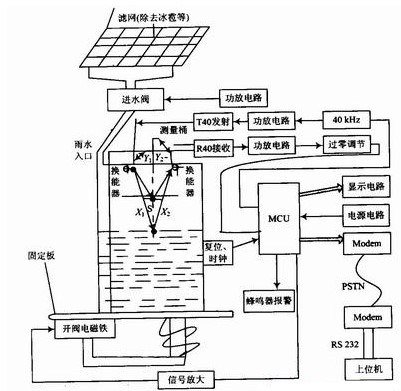
系统在正常的测量状态下,经过单片机控制进水阀开启。单片机在正常状态下,先发射一个参考波形(频率为40 kHz),然后经过功放电路后,由T40发射。经过功放电路。为减小误差,需经过过零调节电路后由单片机读取信号。此后单片机通过计时计算速度,再发送一族波形计算实时的液位高度,通过每秒的高度差,计算雨量大小,并通过本地电路显示,同时通过Modem传送至上位机部分。
如果雨量过大,则蜂鸣器会产生相应的报警信号;如果系统不能工作在正常状态,则单片机通过控制命令,启动开启阀并放大后,使电磁阀工作并排水。
在测量的过程中,将会出现两个距离,一个为挡板距离,另一个为液位高度。通过比较返回时间的先后来确定两者的具体含义。在超声波速度的检测过程中,采用定时测量的方式,时时更新速度。
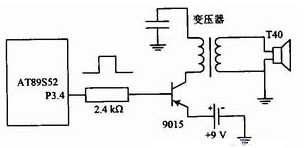
2.1 发射电路
在气体中的超声波衰减量与距离的平方成正比,且频率越高,衰减越大。根据实际情况,本系统采用40 kHz4阼为发射频率。单片机经过编程产生40 kHz频率后,经过9015信号放大后驱动T40发射电路。发射电路如图3所示。接收探头接收到回波,并经过信号处理环节后,送给单片机。通过单片机的定时器可以测出超声波脉冲发生串发射至接收到回波信号所需的时间。连续发送10次,然后取平均值。
2.2 进水排水及测量控制电路系统
滤网用在冰雹、雨夹雪等特殊的工作环境下,用于防护电路。虑到超声波有1 ms延时,存在盲区为34 cm,因此挡板与探头的距离确定为350 mm.桶的顶部至顶部上层为500 mm,测量桶上的缓冲桶截面积要大于测量桶,一般取倍。同样为了避免盲区,由单片机控制并进行放大驱动后发送信号驱动开水阀和排水器(通过开启电磁阀)进行相应操作。测量时,当测量筒内的水位低于某值h0或高于某值h1时,进行控制并记录水位之差。
2.3 与上位机的远程通信电路
上位机是指人可以直接发出操控命令的计算机,一般是PC,屏幕上显示各种信号变化(液压,水位,温度等)。下位机是直接控制设备获取设备状况的计算机,一般是PLC/单片机之类的。上位机发出的命令首先给下位机,下位机再根据此命令解释成相应时序信号直接控制相应设备。下位机不时读取设备状态数据(一般为模拟量),转换成数字信号反馈给上位机。简言之如此,实际情况千差万别,但万变不离其宗:上下位机都需要编程,都有专门的开发系统。
为了对降雨强度的变化进行分析或测定水位涨落速度超限报警灯,以便远程监测,可用程序设定定时采样,并送出数据,随时比较分析。AT89S52负责从雨量监测现场采集参考速度及雨量信息,并将其存入存储器中,同时负责Modem的初始化工作,并实现通信所必须的拨号、连接、传送、挂断等功能。在收到其传送的数据后,在其界面窗口上实时显示、存储。
3 软件设计
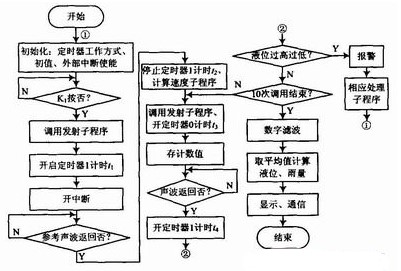
图4为系统软件设计流程图。单片机通过检测是否按下K1来决定是否发射超声波。首先发射参考波形,通过计数器计数,以计算实时速度,并存储。如果超出范围,则报警并开启或关闭阀门,否则进行连续10次的调用,并且取平均值。最后通过其他各环节的显示、存储或者处理。
4 误差分析及校准
在测量雨量液位的过程中,会因外界的因素带来各种误差,如环境变化带来的声速变化、超声波回波声强的影响、数据处理时的误差等。下面就这些问题给出部分解决方案。
4.1 声速误差
温度影响是其中最重要的误差因素。使用实测温度法不需要增加如温度传感器等硬件,利用在桶内下方安装的挡板(距离已知),实测超声波声速。参考两者的返回时间,即可利用单片机测量出雨量液位。该方法的误差很小,不会因为温度、湿度、气压等给系统带来误差。
4.2 过零误差
回波的声强与探头距液位的远近有关系,实际测量雨量液位时可能不是第一个回波的过零点触发,这种误差不能完全消除,但可以根据障碍物的距离调整脉冲群的脉冲个数及调整动态比较电压来减小误差。另一方面,将求距离公式后加一个补偿计时误差也可减小该误差。
4.3 触发误差
由于信号在传输过程中要经过放大整形等信号处理环节,门控产生"开、关门脉冲",受噪声信号的影响,使得触发时间带来随机误差。触发信号越平坦,则误差越小,故采用矩形波脉冲触发。
4.4 其他误差
作为液位器考虑到水泡、波浪等状况的干扰,会造成超声波的散射现象,通过对单片机的控制进行延迟提高抗干扰能力。另外对于数据误差等。超声波自身也会受到干扰,可以注意印制板走线,注意屏蔽。另外,超声波传感器需要通过同轴电缆与电路相连。
此外可以通过软件方法,如数字均值滤波和相关滤波来抑制随机噪声。
5 注意事项
在安装超声波传感器的时候,还应该注意以下几点:
(1)测量传感器到底部的距离一定要精确;
(2)为了防止吸收率太高造成的影响可选用量程稍大的换能器;
(3)安装换能器的位置要与雨水入口有一定的距离,以防干扰超声波的测量;
(4)换能器到控制电路之间的连接可以使用同轴电缆。
6 结语
该系统具有很高精度,而且节约硬件,能够实现远距离控制。与温度补偿相比,该系统利用实时测量的方法,使得测量更为准确、方便。经过分析,误差满足设计要求。系统可以在恶劣的天气条件下提供较高精度的雨量液位测量,适用范围广,是未来仪表的发展趋势。
-
传感器
+关注
关注
2577文章
55498浏览量
793888 -
单片机
+关注
关注
6078文章
45579浏览量
673552 -
超声波
+关注
关注
63文章
3325浏览量
146037
发布评论请先 登录





评论