 机器视觉软件Sherlock的相机标定工作原理与步骤分析
机器视觉软件Sherlock的相机标定工作原理与步骤分析
在应用机器视觉进行检测或测量时,要得到精确的测量值,需要相机CCD平面和实际检测或测量零件的表面相平行。否则,将发生透视性失真,从而很难保证精度。相机CCD与零件表面的平行通常通过人工调整夹具来保证。但是,调整夹具不可能完全保证平行,而且需要耗费很长的时间。
相机所拍摄图像的坐标系并不是用户实际需要的坐标系,因此需要将坐标系转换成用户需要的坐标系。
机器视觉软件Sherlock利用标定很容易修正仿射性失真引起的畸变,并可方便的进行坐标变换。
1、 相机标定工作原理
相机标定就是将相机像素坐标系转换成用户实际测量或检测所需要的坐标系,使虚拟摄像机以真实单位进行精密测量。
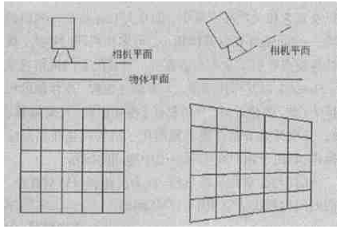
Sherlock的相机标定利用了透视算法进行标定。每一次失真的类型都不一定相同,透视校正算法将对仿射变换和线性透视畸变进行补偿,特别是当摄像机平面和物体平面不平行的时候,图像中物体的直线仍然是直的,但是平行线不再平行(如图1,透视失真),标定将补偿仿射变换和少量的非线性畸变。
Sherlock的相机标定方法是在一个虚拟相机中利用四点坐标系函数来建立四点的位置。这样,根据相机中的四个点的位置同实际坐标的关系,Sherlock可以通过内部数学转换进行坐标变换,来校正仿射性失真或由于比例、偏移和旋转(倾斜)引起的变化。
当摄像机传感器平面和物体平面之间存在一个角度时,透视畸变就会发生。此时棋盘上的正方形看起来像梯形。透视畸变的数学公式如下:
u=(ax+by+c)/(hx+hy+I),
υ=(dx+ey+?)/(gx+hy+i)
(x,y)是摄像机或物体平面上的坐标,(u,v)是另一个平面上的转换坐标。A,b,c,d,e,f,g,h和I是透视畸变算法从内部取出用于转换每个要求点的转换参数。
2 、相机标定的步骤
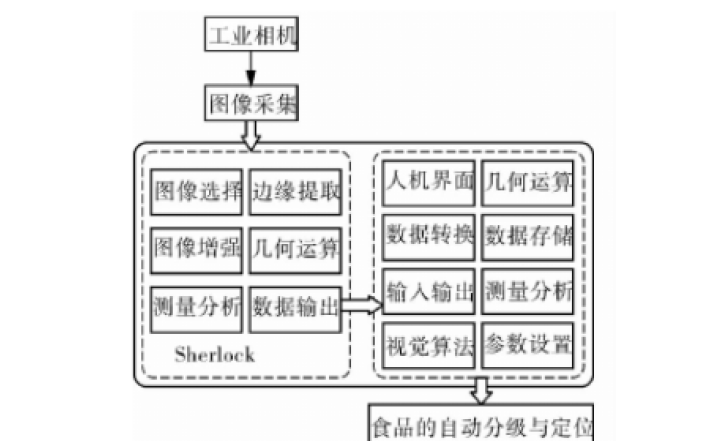
图2是标定主页图。相机标定的一般步骤如下:
(1)建立一个子程序(Insert | Subroutine)。
(2)在策略窗口树的顶部双击子程序图标,Sherlock显示子程序编辑对话框。
(3)编辑子程序,选取“Execute During Calibration”点击OK按钮保存并且退出。
(4)创建一个虚拟相机(Insert | Subroutine)。
(5)通过使用菜单命令(Stakeout | Options)显示默认的相机坐标栅格,在坐标栅格下方选择“Lines“,然后点击OK按钮退出对话框。

(6)将一个已知尺寸的零件作为标定块放置在相机的视野范围内。
(7)在虚拟相机窗口,选择零件上的四个特征点作为标定点。
(8)在子程序中插入公式(fromular)。编辑公式,将四个特征点的坐标作为公式的输入值,选择标定(calibrate)函数。
(9)编辑标定(calibrate)函数的参数,输入四个标定点的实际坐标值。
(10)再次选择菜单命令(Investigate | Calibrate),将出现新的坐标栅格。可以在Stakeout | Options中改变栅格大小。
(11)对其他零件进行测量,测量的结果将是实际测量值。
3、 单个相机多个标定
Sherlock的标定在同一个测量平面内是有效的。如果用一台相机对多个平面的尺寸进行测量,那么就需要进行多个标定。如图3所示,用一台相机测量Ф5和Ф10尺寸,如果相机从上面拍摄,由于两个平面距离相机的远近不同,所以两个平面在所拍摄的图像中对应的比例也不同,如果对Ф10的平面进行标定,则Ф5的平面上测量的结果就不准确,同样,对Ф5的平面进行标定,则Ф10的平面上测量的结果就不准确。Sherlock可以对同一相机产生两个多个虚拟相机(stakeout),在该图中可以利用两个虚拟相机(stakeout),分别对Ф5的平面和Ф10的平面进行标定,这样就能得到精确的结果。

4、 虚拟相机的一个标定
在机器视觉中,有时候多个虚拟相机(stakeout)可能只对一个平面进行测量或检测,或者多个相机所测量或检测的物体与相机的CCD平面距离相等,此时如果对每一个虚拟相机都进行标定将很耗时,这种情况下,Sherlock可以只对一个虚拟相机进行标定,以使多个虚拟相机可利用同一标定进行测量或检测。
责任编辑:gt
-
相机
+关注
关注
4文章
1350浏览量
53584 -
机器视觉
+关注
关注
161文章
4369浏览量
120287 -
测量
+关注
关注
10文章
4852浏览量
111247
发布评论请先 登录
相关推荐
机器视觉技术
基于Dragonboard 410c平台的机器3D视觉—摄像机标定原理
opencv相机标定原理与步骤


使用并联机器人和机器视觉技术实现自动分拣机器视觉软件系统的设计

相机标定含义(解决什么是相机标定)
为什么要进行相机标定?相机标定有何意义?






 工商网监
工商网监
评论