 采用2FSK技术和IIR滤波器实现闭环旋转导向声波短传系统的设计
采用2FSK技术和IIR滤波器实现闭环旋转导向声波短传系统的设计
前言
旋转导向闭环钻井技术是当今国内外开发的各种先进钻井技术与工艺中具突破性和战略意义的技术,它将计算机控制技术揉合于钻井工具,代表了当今世界钻井技术发展的最高水平。西安石油大学井下测控研究所研究的可控偏心器是智能导向钻井工具,可实现井下闭环旋转导向智能钻井系统。
声波短传的提出
要实现旋转导向闭环钻井就离不开地面和井下组合间的通讯,对于井下到地面的信号传输,石油界已有较为成熟且商业化的技术——随钻测量(MWD),该技术主要用来监测井下工作情况,并将其传输至地面。但是近钻头数据的短距离传输目前还没有成熟的技术。
1993年以来,西安石油大学井下测控研究所一直致力于井下闭环旋转导向智能钻井系统的研究与试验,其中就包括把靠近钻头位置传感器采集的数据传送给主轴,最初是在可控偏心器主轴和不旋转套之间使用滑环来传输信号。但是用这种方法传输信号时出现一些问题,因此最好的解决办法是研制出近钻头无线短传装置。
2007年,西安石油大学井下测控研究所致力于研究电磁遥测方法,根据可控偏心器这种特殊的结构,建立一套无线电磁短传系统。研究的结果是:当发射线圈和接收线圈安装在钻铤的内部,泥浆完全导电,信号发射功率为0.3W时,接收端信噪比是-60dB。但是,这种方法受井筒周围地层电导率的影响较大。因此,本设计决定用声波实现从不旋转套到主轴的信号传输。
可控偏心器中的声波短传
可控偏心器的机械结构
主轴通过轴承的耦合穿过不旋转套,在不旋转套上有电子腔、控制偏心位移矢量的定位总成和翼肋。主轴的一端接钻头,另外一端接稳定器。在稳定器中还有与MWD连接的电源短节。近钻头的传感器如钻头内外压力、钻头姿态等安装在不旋转套上的电子腔中,发射电路板、供电电池和发射换能器也安装在不旋转套内的电子腔中,它们在电子腔内并行放置着。接收端供电电池、接收电路板和接收换能器在稳定器的电源短节中。
声波短传系统的组成
(1)发射装置:发射电路对近钻头传感器送来的数据进行FSK(频移键控)调制,即在传输信号的最佳频率点附近选2个频率点作为调制二进制数据,然后通过耦合电路将调制后的FSK信号送入功率放大器,信号通过功率放大后再送入发射换能器。发射换能器将该电流信号转换成声波信号。而此声波信号在可控偏心器、钻井液、地层构成的回路中传输。
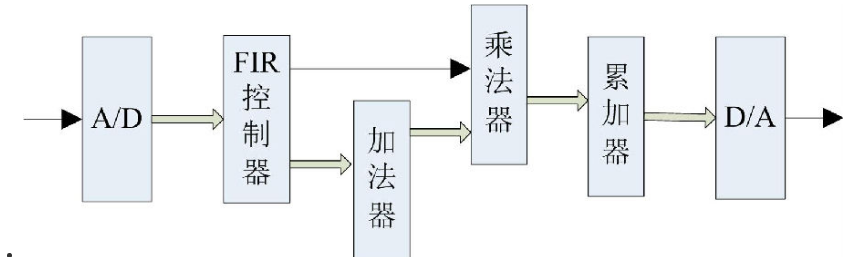
(2)接受装置:位于传输信道另一端的接收换能器将传输过来的声波信号转换成电流信号,将捕获到的信号反馈到小信号放大器,经过放大、噪声滤波、FSK解调以及信号检波等一系列功能模块的处理最终获得传输到MWD的数据,将此数据通过232口传送到PC机上绘图显示。声波短传系统的原理框图如1所示。

图1 声波传输系统原理框图
发射端信号处理
调制方式及同步信号
考虑到声波沿油管传输的声学特性和在可控偏心器传输时的频响曲线,因此利用2FSK调制,选取信道中衰减最小的6.8kHz和7.3kHz作为发射频率。此外,为了在同步时能够进一步分析中低频段油管声信道的频率特性,选择线性调频信号LFM作为同步信号。
软件设计
对C8051F060单片机、AD9833的I/O接口及交叉开关初始化。AD9833初始化流程图如图2所示。在进行FSK调制时,AD9833的两个频率寄存器装载不同的频率值。在本设计中,频率寄存器0装载低频率6830Hz,频率寄存器1装载高频率7230Hz。主程序流程如图3所示。
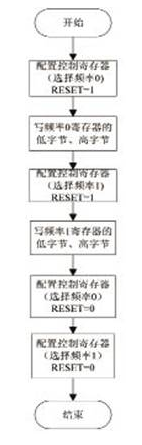
图2 AD9833初始化流程图
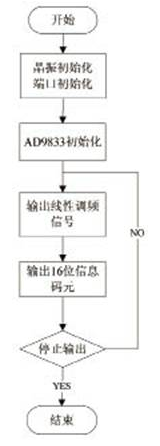
图3 主程序流程
写数据到控制寄存器
单片机传送数据到AD9833的时序如图4所示。FSYNC引脚是使能引脚,电平触发方式,低电平有效。进行串行数据传输时,FSYNC引脚必须置低。需要注意的是,在FSYNC开始变为低前(即将开始写数据时),SCLK必须为高电平。
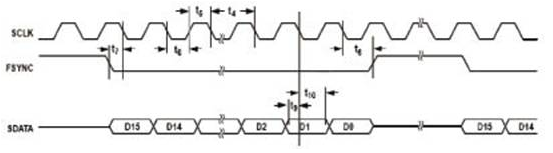
图4 单元机传送数据到AD9833的时序图
单片机写16位数据到AD9833时,高位在前,低位在后。用软件模拟时钟信号和片选信号。传送数据的程序如下:
SCLK=1;
FSYNC=1;
Delay(100);
FSYNC=0;
for(i=0;i《16;i++)
{ SDATA=datas&0x8000;
SCLK=0;
Delay(50) ;
SCLK=1;
datas=datas《《1;
}
Delay(50);
FSYNC=1;
SCLK=0;
输出波形
在示波器上观测FSK调制信号,可看到频率为7230Hz的正弦信号输出,实际输出频率为7.22985kHz。
接收信号处理
接收处理过程
由于声波传感器输出的是模拟信号,因此在进行ADC采样之前必须进行信号的预滤波处理。考虑到最大限度降低信号纹波的要求和滤波器的通带滤波特性,本设计中采用Butterworth型滤波器。
经过调理后的传感器信号还不能立即被单片机采样。这是因为,传感器输出信号的范围是-5V~+5V,而单片机ADC模块的输入电压范围是0V~2.5V,所以调理后的传感器信号必须经过电压转换电路,由精密电压芯片AD780为单片机提供2.5V标准的ADC参考信号。
程序设计
上位机应用程序是运用MATLAB的类(Serial)和m语言开发,辅以MATLAB的GUIDE工具箱,程序开发相对简单。SoC的程序应用C语言编制。下位机MCU接收到上位PC机的下发命令后,通过串口中断程序转入相应的子程序,执行相应操作,最后返回一个握手信号作为状态标志,确认命令是否被正确执行。
帧同步识别
同步过程实际上就是寻找最大相关峰的过程。
先确定一个门限GATE,只有当乘累加的值大于GATE以后才开始比较相关峰。GATE必须设定的意义有两条:
(1)减少不必要的比较次数,提高程序执行效率;
(2)将随机噪声和lfm信号乘累加得出的伪最大相关峰滤掉。
出现大于门限GATE乘累加值时,预示着真实的lfm信号可能到来。找到相关峰值所在的位置,就可以知道信息码的起始位。
解调滤波器的软件设计
设计中心频率为6830Hz的带通滤波器,其阶数为8阶,采样频率为100kHz,通带范围内的幅值衰减为1dB、阻带最小衰减为30dB。根据以上参数来设计滤波器为:
将高阶的IIR滤波器转换为一系列二阶IIR滤波器的级联。从FDAtool中输出的分子系数为Num,分母系数为Den,增益为Gain。滤波器的传递函数如下式所示:
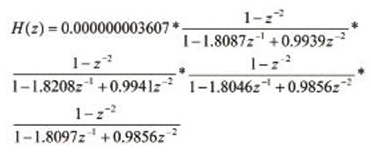
根据滤波技术要求在FDAtool中得到滤波阶数为8阶,系数采用4个二阶级联方式的IIR滤波器。这四个二阶级联的根本形式是一样的,只是在于它的系数不同,滤波程序的编写可以采用for循环的形式,循环4次就可以构成一个点的滤波。整体滤波的软件流程如图5所示。
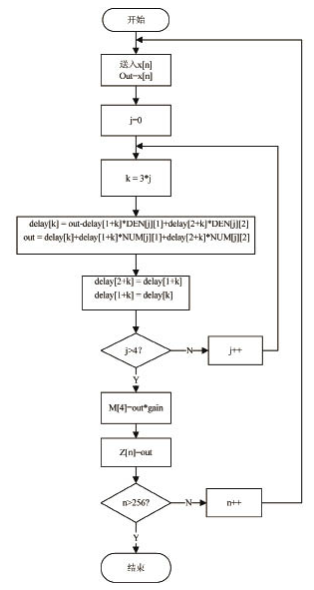
图5 四阶带通切比雪夫滤波器软件编程流程图
本文通过调用MATLAB中Simulink的各功能模块构成数字滤波器的仿真框图。通过Simulink环境下的数字滤波器设计模块导入FDAtool所设计的滤波器文件,反复进行仿真,以得出最好的滤波效果。原始信号波形图和滤波后信号波形图分别是图6和图7所示。从图7中可以看到经过离散采样、数字滤波后分离出了7kHz的频率分量。

图6 原始信号波形图 图7 滤波后信号波形图
解调结果与分析
采用上述解调方法,在单片机C8051F060编写解调程序,通过适配器完成在线调试,采用最终调试成功的解码软件进行解码测试。声波信号在可控偏心器中传输之后,接收端将接收到的信号进行调理、数据采集,采集信号的时域图如图8所示,然后进入到解调程序中进行解调,在MATLAB中绘制图形如图9所示。可以看出,接收端信号经过解码之后的码元是1010101010101010,与发射端的信息码是一致的,说明解调成功。
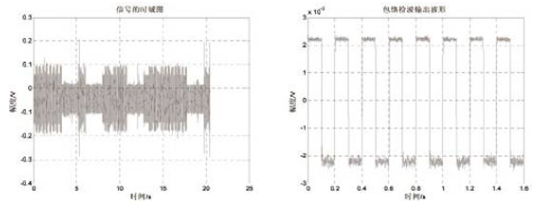
图8 信号时域图 图9 解码后的波形图
结论
在复杂的井下环境中,信息准确实时的传输非常重要。本文采用2FSK技术处理旋转导向工具中的声波短传信号,相比于泥浆脉冲传输方式,信号传输速率更快。同时在接收端设计了IIR滤波器,有效地克服了采用电磁波传输时衰减严重的问题。此外,2FSK技术设备简单,解调方便,有利于推广使用。
责任编辑:gt
-
传感器
+关注
关注
2548文章
50765浏览量
752182 -
滤波器
+关注
关注
161文章
7751浏览量
177756 -
电磁
+关注
关注
15文章
1075浏览量
51730
发布评论请先 登录
相关推荐
经典滤波器的设计说明

TLV320AIC3101四阶数字IIR滤波器可以实现2100Hz以上高频衰减的作用吗?

emi滤波器是什么滤波器
iir和fir怎么比较性能
如何区分IIR滤波器和FIR滤波器
如何区分fir与iir的系统函数
IIR系统和FIR系统的区别
iir滤波器和fir滤波器的优势和特点
FIR滤波器和IIR滤波器的区别与联系有哪些






 工商网监
工商网监
评论