 基于TCRT5000反射式光电传感器实现移动机器人寻线控制系统的设计
基于TCRT5000反射式光电传感器实现移动机器人寻线控制系统的设计
1、引言
自主式移动机器人集机械、电子、检测技术与智能控制于一体IlJ。是目前国际机器人研究的热点。基于移动速度和方向易于控制,轮式移动机器人是最为常见的移动机器人。移动机器人研究的重要课题就是:机器人向目标方向移动中,能够自动按照地面的导引线到达某一标志物并完成相应动作。针对这一课题近年来电子竞赛中都有机器人自动寻导引线行走的题目翻。这也是移动机器人的标准问题之一,是解决移动机器人在自由环境自主行动的基础。
以前寻线机器人设计中,其寻线控制系统一般采用如下方式:寻线传感器信号直接输入至控制器判断是否偏离导引线,通过控制左右驱动轮的转速差调整机器人在引导线上的位置,这种方法控制实现简单,但机器人在引导线上将“摇摆”前进,针对传统寻线系统这一缺点,基于模糊控制思想,这里设计一种新型基于多传感器信息融合的寻线控制系统,使寻线机器人可以平稳地按照引导线行走。
2、传感器结构
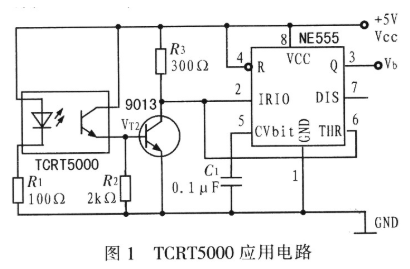
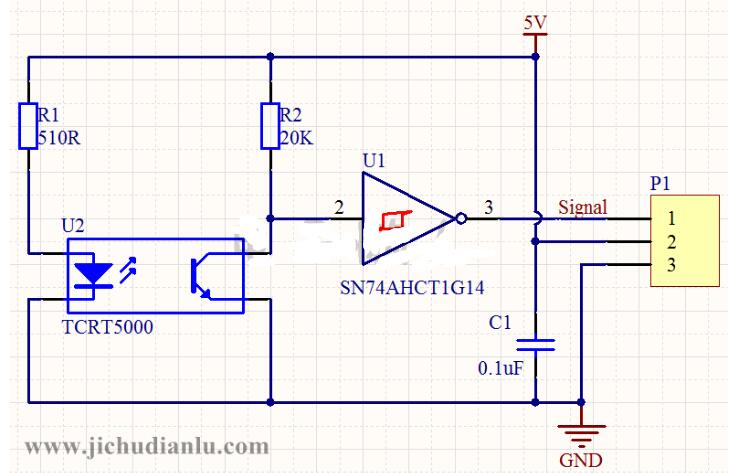
寻线传感器技术主要是利用黑白两种颜色对光的反射程度不同,采用发光二极管和光电三极管组成反射式传感器检测黑色导引线信息。本文用反射式光电传感器TCRT5000组成寻线传感器模块,其应用电路如图1所示。
改进寻线控制系统主要是对传感器模块的结构以及安装形式相应调整。传统的寻线传感器一般由3路或4路反射式光电传感器组成,结构简单,但对导引线信息量获取不足。该寻线传感器模块采用8路反射式光电传感器,车体前端和后端各装一个传感器模块。
3、 模糊控制系统设计
模糊推理是对人脑逻辑推理能力的一种近似模拟,它首先通过模糊集和隶属度函数来描述某事件或现象的模糊性以及不确定性,然后利用领域专家的知识建立模糊规则,通过各种模糊算子进行模糊运算,得出相应的模糊结论,从而实现模糊推理系统的输入和输出之间的非线性映射,所以模糊推理实际上是一种不确定的近似推理。利用模糊推理多传感器信息融合的基本步骤如下:
(1)传感器选择根据实际需要,选取适当传感器进行检测,获取研究对象的有关信息,并对其信息进行预处理。
(2)模糊推理系统设计此环节包括模糊隶属函数和模糊推理规则的确定。按照各种隶属函数的确定方法,用模糊集和隶属函数描述传感器信息;针对具体问题,利用专家的领域知识和经验确定模糊推理规则。
(3)模糊推理 通过各种模糊逻辑算子,计算每一条规则的结论,其中每条结论代表规则前件对规则的满足程度。
(4)模糊合成通过上一步模糊推理,每条模糊规则都得到一个模糊结论,模糊合成是对模糊结论的综合处理,最后得出总的结论。
(5)反模糊化通过各种反模糊化算法,将模糊推理融合的结果即模糊集隶属函数转化为一个精确值。
机器人的自主寻线行走是利用寻线传感器检测机器人偏离导引线的位置,即利用机器人的姿态偏差值调整左右驱动电机的行进速度,从而调整寻线机器人的运行轨迹,使其沿着导引线运行。此特点恰好符合模糊控制的思想,所以机器人寻线系统控制器可以采用模糊控制器。
本模糊控制系统有两个输入变量,分别是前后寻线传感器模块检测到的引导线信息,即iF,iB。模糊控制系统输出为左右驱动电机的速度差,即通过调整两个驱动电机的速度差来调整机器人在导引线上的转角。
根据寻线传感器的配置方式,对前后寻线传感器每一路进行编号,并按照寻线传感器检测到机器人相对导引线的姿态偏差,将传感器的输出转换为16进制的偏差输出值,传感器编号如表1所示。

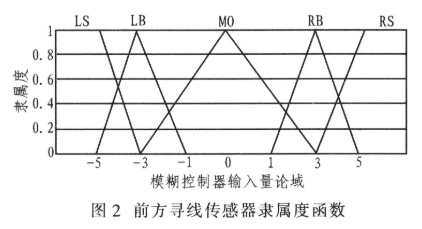
模糊控制器的输入量的语言值模糊子集确定为{LB,LS,MD,RS,RB}。其中:LB=左大;LS=左小;MD=中心;RS=有小;RB=右大。设定模糊控制器输入量论域为{一5,一3,一1,O,1,3,5},定义前方传感器模块(iF)的隶属度函数如图2所示(iB隶属度函数与iF相同)。为计算简单,本研究采用线性函数,从而减少控制器的计算负担,提高数据处理速度。
输出量语言值模糊子集选取为:{NB,NM,NS,ZO,PS,PM,PB}。其中:NB=负大;NM=负中;NS=负小;Z0=零;PS=正小;PM=正中;PB=正大。设定模糊控制器的输入量论域为[一6,一4,一2,0,2,4,6],定义输出变量(OUT)的隶属度函数(图3)。
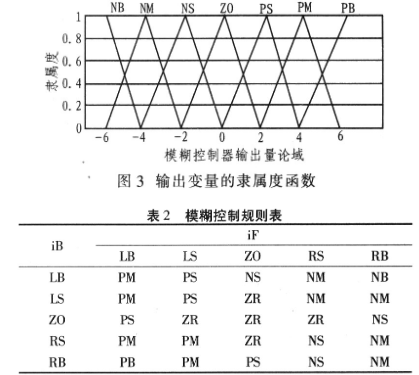
由表2得到的输出结果是模糊量,模糊量一般不能直接控制被控对象,所以还需反模糊化。常用反模糊化法有最大隶属度法、加权平均法、中位数法等。由于最大隶属度法简单易行,且算法的实时性好,故最后应用最大隶属度法对控制规则表进行反模糊化处理,即针对每一个模糊控制器输出得到一个左右驱动轮的速度差。
反模糊化处理后的数据不能直接应用于程序中,理论上得到的反模糊化结果和实际调整效果之间还有一定偏差,该偏差需多次试验来修正,即修正机器人左右控制轮的速度差,经多次试验最后得到控制程序段,其核心程序代码如下:
Motor(1,1700,1,1400,1,0);//电机驱动函数(左轮正反转控制,左轮速度,右轮正反转控制,右轮速度,调整时间,系统控制)

case 0x18:
……
case 0x01:
……
case 0x02:
…… }
4、 结束语
结合近年来电子设计大赛作品,深入分析传统寻线控制系统的不足,在改进硬件设计的基础上,提出将模糊控制算法引入移动机器人寻线控制系统的设想,并在模糊控制理论的基础上加以实现,开发一种新型寻线机器人模糊控制系统,在由模糊控制得到的相关控制规则的基础上经多次试验和修正编写相应程序,实现了更准确、更平稳的寻线控制,解决了传统寻线控制的“摇摆”前行问题,取得较理想的效果。
责任编辑:gt
-
传感器
+关注
关注
2552文章
51233浏览量
754718 -
控制系统
+关注
关注
41文章
6637浏览量
110690 -
机器人
+关注
关注
211文章
28520浏览量
207529
发布评论请先 登录
相关推荐
基于超声波传感器的自主移动机器人的探测系统
80c51操作TCRT5000 反射式光电开关进行计数的问题,求解
关于TCRT5000 反射式光电开关的参数问题
Labview My RIO 移动机器人
基于超声波传感器的自主移动机器人探测系统
基于FPGA怎么实现三轮全方位移动机器人运动控制系统?
家庭移动机器人避障常用传感器及相关技术
如何实现移动机器人的设计?
如何使用Nano130来控制TCRT5000传感器
TCRT5000红外光电传感器应用模块电路





 工商网监
工商网监
评论