 基于POV的旋转线阵LED显示屏设计原理及过程分析
基于POV的旋转线阵LED显示屏设计原理及过程分析
1.引言
视觉暂留(POV)即视觉的短暂停留。人眼观看物体时,物体的像会成到视网膜上。视网膜上的光感细胞将光信号转换为生物电信号通过视神经传给大脑。然而,当物体移去后,视神经对物体的印象不会立刻消失。现代医学已经证明,人眼看到一个物体后,在1/24秒内不会消失。这种现象叫做视觉暂留,也叫人眼的惰性。这种惰性会使人的视觉产生重叠,使物体“变静为动”.所以,以每秒超过24帧画面以上连续呈现静态画面时,我们会看到平滑连续的动态画面。
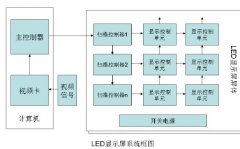
基于视觉暂留的旋转线阵LED显示屏指的是利用人眼的视觉暂留效应[1],通过机械扫描的方式让一列线阵LED在正确的位置上使特定的LED发光而形成图形、文字等的一种显示屏。按其机械结构,旋转线阵LED显示屏主要有圆形[2~3]和圆柱面两种基本类型(另外还有球形、漏斗形等显示屏,它们实质上只是圆柱形显示屏的一种特例)。
2.POV显示原理
2.1 圆形显示原理
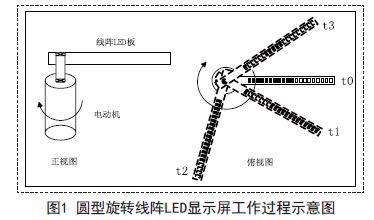
在基于POV的圆形旋转线阵LED显示屏中,一个条状PCB板上集成了20个贴片型发光LED,下文简称线阵LED1.集成有LED的PCB板绕其一端随电动机转动,当转动到合适的角度时点亮合适的LED就可以显示需要显示的内容,其示意图如图1所示,而在何处点亮哪些LED就应该符合圆形LED屏的显示原理,图2和图3分别描述了圆形指针式时钟和数字式时钟的显示原理。
在图2中,图2(1)指定了20颗LED用于显示表盘、时间刻度、时针、分针和秒针的颗数及分布。明显可以看出最内和最外一颗用于显示表盘的内圈和外圈。自内向外,第1~9颗用于显示时针,第1~12颗用于显示分针,第1~15颗用于显示秒针,第17~19颗用于显示时间刻度。具体来讲,3颗亮表示12点刻度,2颗亮表示3、6、9点刻度,1颗亮表示其余时间刻度。为了将时针与刻度隔开而提高时钟的易读性,第16颗LED一直不亮。在线阵LED的每一圈旋转过程中,在图示的位置点亮对应的LED并延时就可以显示出当前时刻。图2(2)中显示的时刻为03:40:00.
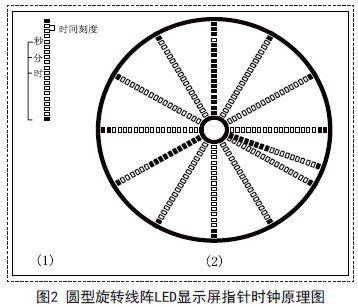
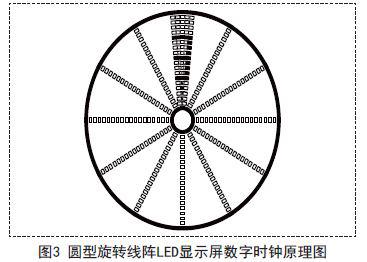
图3描述了圆形LED显示屏显示数字的原理,即是在每一圈旋转内的 时时间内,点亮第1、7、11、15及20颗LED,在 的下一个时刻点亮第1、7~15及20颗LED就可以显示数字3.
特别地,起始起始 、延时时间 及字符历经时长 的具体计算在本文后面有详细的推证过程。
2.2 圆柱面型显示原理
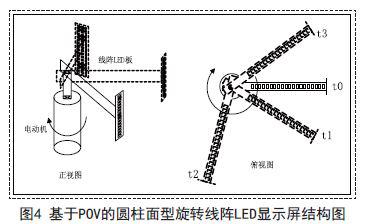
基于POV的圆柱面型旋转线阵LED显示屏的结构如图4所示。本设计在圆形LED显示屏的基础上增加了一个竖直的集成有17颗贴片LED的PCB板,下文称线阵LED2.当然,为了维持系统旋转的平稳性,在另一端我们增加了螺柱等使两端重量平衡。当线阵LED2随着电动机旋转时,在的合适的位置点亮特定的LED,在视觉暂留的影响下我们就能看到各种文字和图形。
图5描述了圆柱面型旋转线阵LED显示屏显示字母D的工作原理。
在图5中,图5(0)指定了17颗LED的相应功能,即自上而下第1~16颗LED是显示LED,第17颗为底边线LED;图5(1~8)描述了圆柱面型LED显示屏显示字母D的详细过程,即根据字母D的字模数据在每一圈旋转内的起始时刻 点亮第3、13及17颗LED,在接下来的时刻分别点亮第3~13和17颗,第3、13及17颗,第3、13及17颗,第3、13及17颗,第4、12及17颗,第5~11和17颗最后再全部不亮就可以显示出字母D.
3.旋转线阵LED屏设计
3.1 机械结构
旋转线阵LED显示屏的机械结构如图6所示,结构要求重量均匀分布在电机转动轴两旁。本文将单片机、时钟芯片、线阵LED、一体化红外接收头等器件焊接在一块指针型的电路板上,这样可以使旋转的电路成为一个独立的部分。电路板一端钻一个电机轴插孔,插孔为半圆且半径与电机轴相等。电机轴插入其中带动指针板旋转。
3.2 系统通信设置
在设计中,显示屏显示的内容、显示模式切换以及当前时刻的设定都是通过红外无线通信实现的。在图6中,红外一体化接收头(HS0038)接收由手持遥控器发出的频率为38KHz的间断脉冲,HS0038对接收信号进行放大、检波整形后得到TTL编码信号直接给单片机解码出调时、数字显示或指针显示三种不同的控制信号。
3.3 起始位置校准
电机转速的稳定性直接决定了显示是否有重影和浮影。然而,要其完全不变是不可能的。在这种情况下,误差会积累而形成浮影。
所以,对起始位置的不断矫正是理由非步进电机制作旋转LED显示屏必不可少的技术。通过磁电传感器检测置于固定位置的小钢粒来不断定位起始位置消除积累误差。本文在指针板上加装一个红外接收管。当接收到与之配对的红外发光二极管(红外发光二极管安装在电机外壳上,并与接收管对齐)发出的红外线后,就会反向导通产生低电平而触发外部中断。指针板每旋转一周,就会产生这样一个中断信号,这个信号被称为“过零信号”.
外部中断的任务是将旋转角度清零,以此消除积累误差。
3.4 系统供电设计
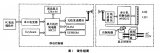
由于单片机、线阵LED等会随高速旋转的电动机旋转。有线供电实现复杂、不稳定且存在安全隐患。再为了让DS1302掉电也能工作,本文DS1302芯片用普通纽扣电池供电而线阵LED采用无线的方式供电。无线供电技术就是通过电磁感应原理,将电能以无线的方式传输给负载。无线供电的装置一般由两个分离的线圈,称为初级线圈和次级线圈,构成。但这就需要在初级线圈上提供交流电。所以,本文通过电刷的方式将直流电转换为交流电。无线供电的结构及电路图如图8所示。在图8(1)中,将与电机同规格的换向器及电刷套在轴上。固定的换向器与上部旋转的部分连接。
4.结论
本文详细研究了基于POV的两类线阵LED旋转时钟的工作原理。在此基础上,通过Multisim、proteus等仿真软件对系统的硬件进行严密仿真,用C语言进行了程序编写。最终实现了圆形LED显示屏的模拟式时针时钟、数字式时钟、和笑脸图案的静动态显示,圆柱面LED显示屏的下拉显示、汉字显示、打印字效果显示和3种动画显示。同时,本文还实现了两类显示屏的同时多模协同显示。部分的显示结果如图9所示。
-
led
+关注
关注
242文章
23437浏览量
664765 -
LED显示屏
+关注
关注
36文章
1833浏览量
99479 -
电动机
+关注
关注
75文章
4134浏览量
97342
发布评论请先 登录
相关推荐







 工商网监
工商网监
评论