 采用CAN-232B智能型转换网桥实现地面变电所模拟盘控制器的设计
采用CAN-232B智能型转换网桥实现地面变电所模拟盘控制器的设计
1、 问题的提出
以前对井下电力负荷的监控,只能靠模拟电表来指示。现在可以采用计算机控制与管理,用模拟盘显示井下负荷的动态工作情况。可以借助CAN-232B智能型转换网桥和模拟盘控制器来实现这些。
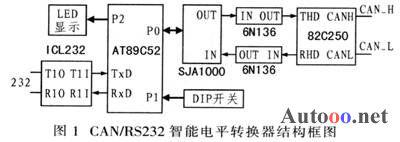
CAN-232B智能型转换网桥,用于PC或其他带RS 232端口的设备与CAN设备之间的通讯CAN(Controller Area Network)是一种串行总线系统。CAN拥有高传输速度(高达1 Mb/s)和高可靠性,能以高性能和高品质的方式实现高度可靠的监控系统。为了能在通常的RS 232设备上使用CAN网络,CAN-232B设计成将RS 232的串行帧重新打包为CAN扩展帧,并通过CAN收发器发送到CAN总线上;反之,如果CAN-232B的收发器收到CAN总线上的数据帧,而且通过了验收码校验,它就会把CAN帧拆包,并将其中的数据发到RS 232口上,因此它可以在CAN与。RS 232之间精确地转换信息。
CAN-232B有2种工作模式:设置模式和工作模式。在设置模式下,用户可对它的参数进行设置。而在工作模式中,它完成上述的协议转换。CAN-232B特别适合小流量的CAN-bus数据传输应用,最高可达300帧/s的数据传输速率。
CAN-232B采用表面安装工艺,板上自带光电隔离模块,在控制电路和CAN电路之间实现完全电气隔离。CAN-232B也采用防雷设计,每线提供600 W的抗雷击承受力,加上独立的DC/DC电源,这样的三保险设计使CAN-232B具有很强的抗干扰能力,大大提高系统在恶劣环境中使用的可靠性。
2、 模拟盘控制器的功能
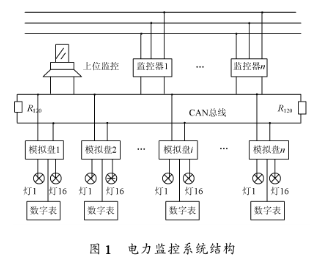
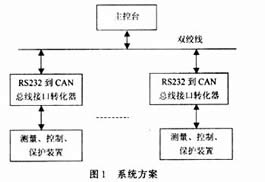
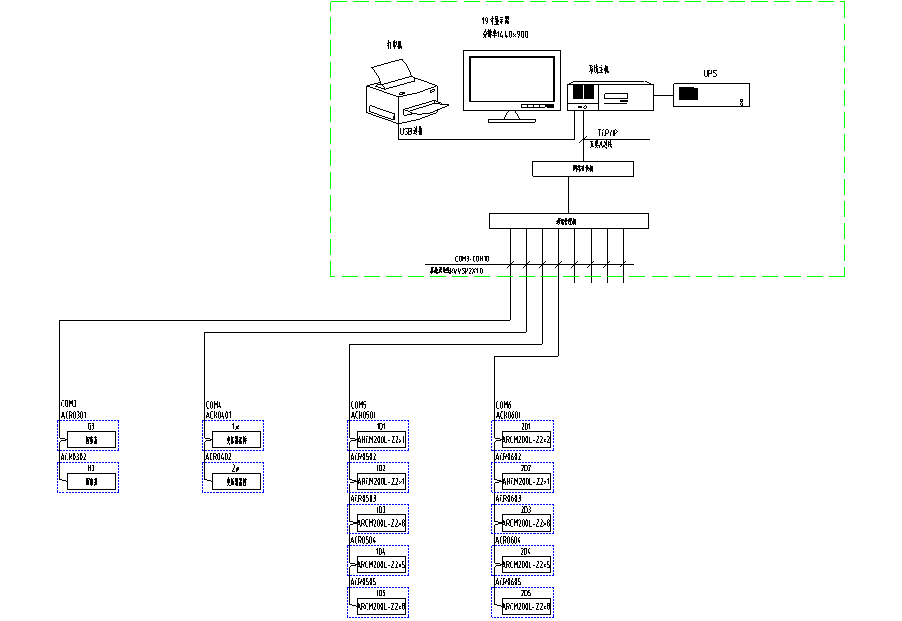
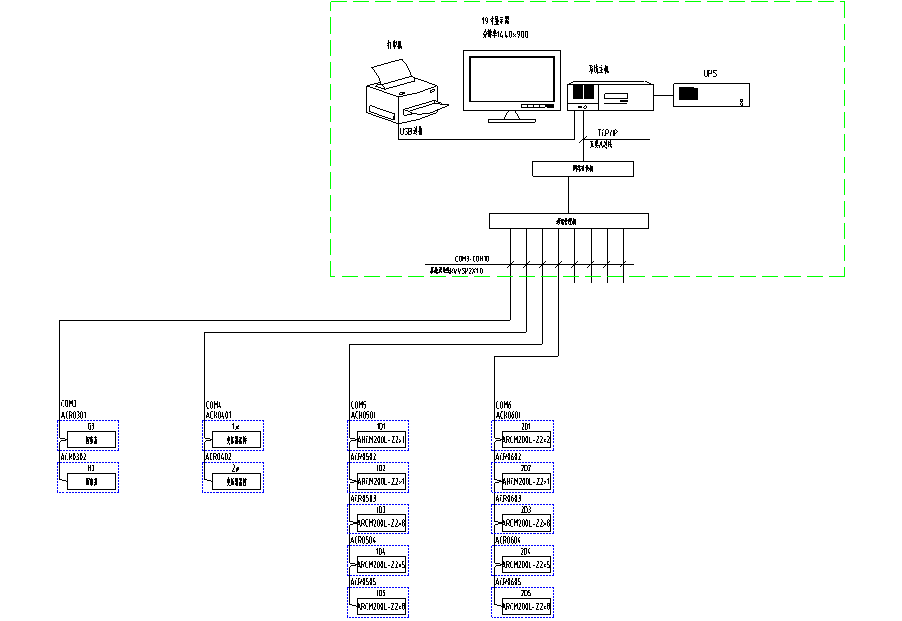
电力监控模拟盘设于地面变电所,主要用于低电压等级供配电系统的计算机监测与控制。在供电系统的每条配电回路中安装1台监控器,通过CAN总线通信网络与现场控制站及中央控制站共同形成一个供配电计算机监控与管理系统。
模拟盘控制器是电力监控系统的显示部分,在现场中的监控器采集到回路的模拟量、开关量,并将这些数据根据CAN总线通讯协议转化成可传送的数据帧格式发送到CAN总线上。模拟盘控制器一直“挂”在CAN总线上,当CAN总线上有数据时,模拟盘控制器利用接受中断程序接收这些数据帧,并根据CAN总线的通信协议将数据帧还原成相应数据发送到自身所携带的指示灯或数字表上进行显示。当调度端主机发出遥控合闸或遥控选线命令,模拟盘控制器根据CAN总线协议将命令转化成可传送的数据帧格式,利用发送中断程序传送到CAN总线上,现场相应的开关接受到命令后进行相应的动作。
3、 模拟盘控制器的硬件设计
3.1 硬件电路设计
模拟盘控制器的硬件电路主要由:P8XC592单片机、1232看门狗、RAM数据存储器6264、ROM程序存储器27C256、CAN控制器接口PC:82C250,RS 485通讯、光电耦合器6N137、光隔等构成。
P8XC592单片机为整个硬件电路的核心,由Philips公司开发生产的,适用于自动和通用工业应用的8位高性能微控制器。它在80C51标准特性基础上增加了一些重要的硬件功能,如与内部RAM进行DMA数据传送的CAN控制器;具有总线故障管理功能的1 Mb/s CAN控制器;与标准80C51兼容的全双工UART等。
P8xC592共有68个管脚,其中P0~P3与80C51相同,并行I/O口P4的功能与P1,P2和P3相同。P5口主要用作A/D变换器的模拟量输入端。P0~P3还可完成下列功能:PO为扩展P8XC592标准存储器和外部设备提供用作分时复用的低8位地址和数据总线;P1可作为外部中断请求输入端、外部计数器输入端、外部计数器复位输入端和CAN接口的CTX0和CTX1输出端;P2当扩展P8XC592标准存储器和外部设备提供用作分时,提供高8位地址;P3引脚可分别进行配置以提供外部中断请求输入端、计数器输入端、串行口UART的接收输入端和发送输出端以及外部数据存储器的读和写控制信号。
本设计利用P0,P2口作为外部存储器的高、低位输出端,P1.0端为模拟盘控制器的外部巡检操作端,P1.1为闪光解除操作端口,P3.0,P3.1,P3.2为RS 485通讯操作端口,P3.3用于看门狗复位,P3.4,P3.5用于P0输出高低位的选通,P3.6,P3.7用于控制外部存储器的读写。在程序设计中采用外部存储单元,数据存储器6264,程序存储器27C256。采用74HCl73进行数据的高、低位的位选。
3.2 硬件电路的抗干扰设计
为了增强CAN总线节点的抗干扰能力,P80C592芯片的CTX0和CRX0并不直接与82C250的TXD和RXD相连,而设计为通过高速光耦6N 137后与82C250相连,这样就很好地实现了总线上各CAN节点间的电器隔离。光耦部分电路所采用的2个电源完全隔离,这样可以提高节点的稳定性和安全性,否则采用光耦就失去了意义。
82C250与CAN总线的接口部分也采用了一定的安全和抗干扰措施。82C250的CANH和CANL引脚各自通过1个5 Ω的电阻与CAN总线相连,电阻可起到一定的限流作用,保护82C250免受过流的冲击。CANH和CANL与地之间并联2个30 pF的小电容,起到滤除总线上的高频干扰和一定的防电磁辐射的能力。
另外芯片P80C592并不直接与输出电路相连。它们之间被光隔相隔离。当外界电路因干扰或者发生故障导致电路运行参数突变时,芯片会因光隔的存在而免受影响,从而保证芯片P80C592的安全运行。以上的各种措施使单片机P80C592完全与外界相隔离,在一个相对独立的环境中运行,保证了系统的稳定性和抗干扰能力。
4、 模拟盘控制器的软件设计
4.1 模拟盘控制器主程序设计
在电力监控系统中,每个监控器监控一个开关状态,监控器通过CAN总线与模拟盘控制器相连,模拟盘控制器自身携带16个指示灯,并通过RS 485通讯卡与一个数字表头相连(见图1)。16个指示灯与监控器监控的16个开关状态相映射,通过指示灯不同状态来折射开关量的状态:本文定义了指示灯显示的3种状态:红色、红快闪、红慢闪。其中指示灯为红色代表开关为正常的工作状态;指示灯为红快闪,表示开关为事故跳闸——报警状态;指示灯红慢闪为巡检状态;数字表头则用来显示监控器采集到的模拟量值。在模拟盘控制器的软件设计中,通过定时器来操作指示灯的闪烁快慢,根据模拟盘通信协议对P4口各端口进行相应的置位、复位,实现指示灯的现实操作。
4.1.1 初始化
初始化包括:有关的RAM单元清零、定时中断初始化、CAN总线初始化、RS 485通讯初始化。
在中断初始化时,要注意对中断允许寄存器IEN0、IEN1的置位,尤其是IEN0.7总允许/禁止中断控制的置位;通过对中断优先级特出功能寄存器IP0,IP1来设定各中断源的优先级。
4.1.2 巡检操作
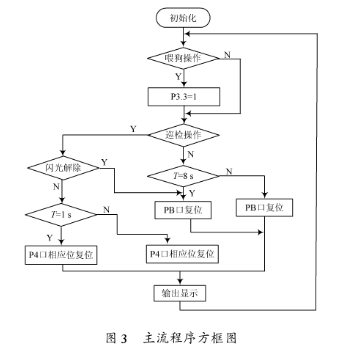
实际操作系统中,设备常时间运行会出现老化、反映不灵敏的情况。为了防止模拟盘控制器硬件电路以及指示灯本身的故障而导致显示状态不能紧跟开关状态变化,本文设计了巡检操作,由P8XC592单片机的P1.0来控制。操作员置位P1.0时,软件程序对P4口所有的位以8 s为周期进行置位、复位操作(见图3),模拟盘控制器开始巡检操作,模拟盘控制器的16路指示灯同时出现“红慢闪”状态,如果有1路或几路指示灯不进行“红慢闪”,则说明相对应的指示灯出故障,操作员可有针对性的排除故障;操作员复位P1.0时,程序进入到下一步操作——事故报警操作。
4.1.3 事故闪烁、解除
在实际操作中开关由于事故出现跳闸,监控器监测到后将信息通过CAN总线传送到模拟盘控制器上。模拟盘控制器根据通讯协议判断出那个开关量跳闸,然后对P4口的相应位以1 s为周期进行置位、复位操作,指示灯相应的位则进行“红快闪”。且指示灯的快闪状态持续到事故跳闸处理。
操作员根据模拟盘上的指示处理相应的跳闸事故后,给模拟盘发出解除命令,指示灯的事故闪烁停止,进入常态工作。
4.2 模拟盘通信协议及其中断服务程序设计
4.2.1 模拟盘通信协议
CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码。采用这种方法的优点可使网络内的节点个数在理论上不受限制,数据块的标识码可由11位或29位二进制数组成,因此可以定义2或2个不同的数据块。数据段长度最多为8个字节,可满足通常工业领域中控制命令、工作状态及测试数据的一般要求。同时,8个字节不会占用总线时间过长,从而保证通信的实时性。CAN协议采用CRC检验并可提供相应)的错误处理功能,保证了数据通信的可靠性。
基于CAN总线通信协议制订了模拟盘控制器的通信协议。
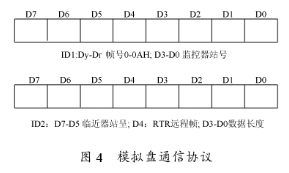
CAN总线传输数据由2数据帧组成:在ID1中,D7~D4为传输数据的帧号;帧号代表传输数据为何种命令;监控器的站号由ID1中的D3~D0和ID2中的D7~D5共7位128种组合;可对应128个监控器监测的开关状态;ID2中的D4表示是否为远程帧ID2中的D3~D0表示数据的长度。
CAN总线此协议首先充分利用了CAN通信协议自身的特点,在帧格式的ID号中体现发送的运行数据量的帧号和监控器的站号。帧号代表传输数据的类型,根据CAN总线的仲裁(CAN总线本身的ID号越小,优先权越大),可以将重要类型的数据规定为帧号较小,这样就可保证重要数据的优先级高于其他类型的数据,程序就会优先处理这些数据。又可利用仲裁,将重要的监控器排列的站号排列得较小,这样又可保证程序优先处理重要的监控器监控的开关状态。
4.2.2 CAN中断服务程序
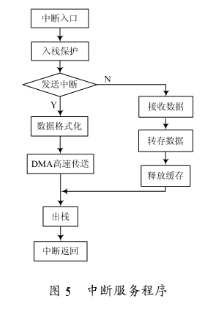
模拟盘控制器通过中断服务程序来受CAN总线上的数据,也是利用中断服务程序向CAN总线上发送数据。如果有发送中断或接收中断请求,运行程序就会进入CAN中断服务程序,入栈保护现场后,判断中断为何种中断(发送中断、接收中断)。并根据CAN总线的通信协议将要发送的数据帧格式或将接收的数据帧还原,然后发送或接收数据,最后出栈进入主运行程序继续运行。
5 、结语
本文采用国际上目前应用最为广泛的现场总线之一CAN总线微处理器技术,进行模拟盘控制器的硬、软件设计。通过与监控系统实际联网进行试验,所设计的模拟盘控制器能够很好地实现规定的功能和技术要求。本方案在煤矿地面变电所应用表明,对煤矿井下用电情况的监视得到明显地改善。
责任编辑:gt
-
控制器
+关注
关注
112文章
16433浏览量
178947 -
CAN总线
+关注
关注
145文章
1955浏览量
130954 -
微处理器
+关注
关注
11文章
2272浏览量
82634
发布评论请先 登录
相关推荐
智能型顶板离层仪的研制与应用
正弦波电力逆变器在变电所中的应用
Link-Max CAN转485/CAN转232智能型CAN转串口转换网桥
Link-Max CAN转485/CAN转232智能型CAN转串口转换网桥
变电站与开闭所、变电所等有什么差别吗?
CAN总线在分布式变电所自动化系统中应用
智能型RS485-CAN总线转换器介绍

智能型数字温度控制器的原理
变电所电能管理系统的设计和应用实例解析
变电所电能管理系统的设计和应用说明





 工商网监
工商网监
评论