 雷达主流调频体制及基带算法的数据处理能力分析
雷达主流调频体制及基带算法的数据处理能力分析
作为雷达软硬件设计的基础,收发调频体制的选择对测距、测速、测向的范围、分辨率、精度、模糊度等核心指标起着关键作用。目前很少有针对汽车雷达的系统化介绍。本文将对量产的车载雷达中最常用的收发调频体制手段,做出相关介绍。
近几年,基于微波雷达的先进驾驶辅助系统的装车率快速上升,常见应用包括前向的碰撞预警FCW、自适应巡航ACC、自动跟车S&G,以及后向的盲区探测BSD、变道辅助LCA、侧向探测CTA等。
尽管各个应用的侧重点不同,但总体上车载雷达主要通过测量目标的距离、相对速度、角度、大小、个数等参数为驾驶者提供及时可靠的预警信息。快速发展的市场要求汽车雷达拥有更远的测量距离,更宽的探测角度、更高的测距测速测向精度,更短的探测时间,更多的探测目标数量,以及更可靠的探测率。
以上要求需要在系统层面作统一提升,包括天线、射频、基带硬件设计、发射频率、扫频带宽、波形调制、基带算法等。作为雷达软硬件设计的基础,收发调频体制的选择对测距、测速、测向的范围、分辨率、精度、模糊度等核心指标起着关键作用。市面上介绍类似雷达调频体制的文章层出不穷,但很少有针对汽车雷达的系统化介绍。本文对量产的车载雷达中最常用的收发调频体制手段,作一简单介绍:
1. 可变斜率连续波雷达(CVS)
该体制波形是由线性调频连续波(LFMCW)发展而来。与LFMCW相比,其可以解决测量多目标时产生的虚假目标问题。
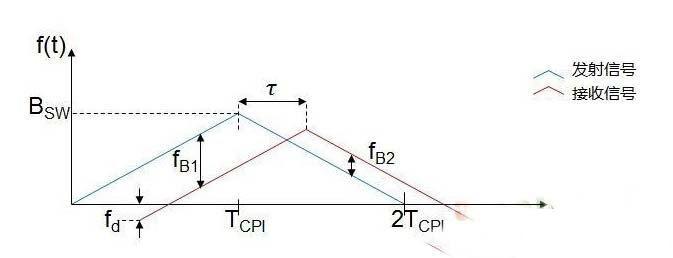
LFMCW波形如下,通过上升沿及下降沿的一组差拍频率求得单个目标的距离和速度,但在多目标情况下,N个实际目标产生的差拍频率有N2种组合,最终造成N2-N个虚假目标。
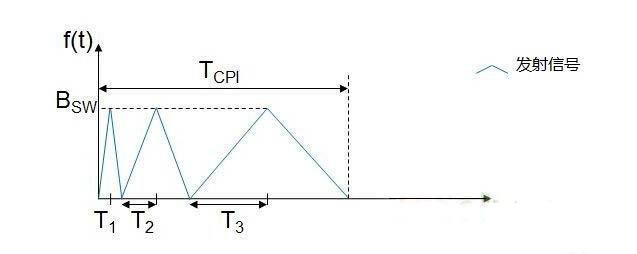
CVS波形有多种,以下图为例。发射机在TCPI内发射三段具有相同调频带宽、不同调频斜率的信号,持续时间分别为2T1,2T2和2T3。
在对回波信号进行数据处理时,分别对三段信号使用与LFMCW相同的算法,最终会得到三组各N2个距离-速度值。对于真实目标,其在三次运算中得到的距离-速度值都应该是相同的,对于虚假目标,其距离-速度值会随着调频周期的变化而变化。因此,只要从三组结果中找到重合的N个距离-速度值,就可以得到真实目标的距离与速度。与LFMCW相比,该波形可以去除虚假目标,同时数据处理的运算量也随之提高,从而对硬件能力提出了更高要求。
2. 多频移键控雷达(MFSK)
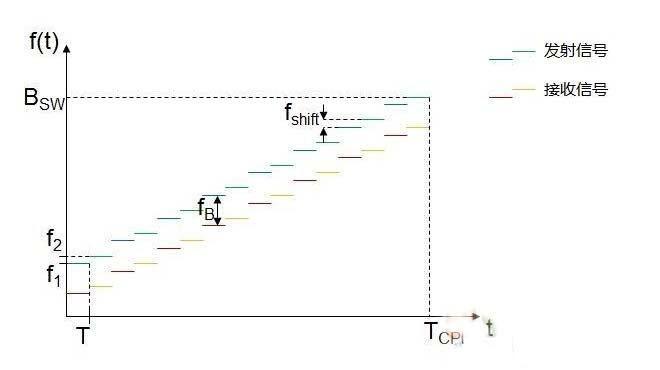
这是一种针对汽车应用而专门设计的波形,该波形由线性调制频率连续波(LFMCW)和频移键控波(FSK)结合产生。如下图所示,发射波形包含两个线性调制,互相交错的阶梯上升信号,序列1用作参考信号,序列2与序列1之间的发射频率差为fshift。接收信号经过下混频得到基带信号,并在每个频率阶梯上被采样。
基带信号序列1和2都会经过相同的FFT和CFAR处理,在单检测目标的情况下,一个具有特定速度与距离的目标将会在两个序列FFT处理结果的同一频率处被检测到。与LFMCW类似,差频fB中同时包含了距离与速度信息,但在同一频率处两个信号的相位差也同样包含了距离和速度信息。因此fB和 (符号1)在一个测量周期内需要同时被用到来解析距离和速度。
在这种情况下,虚假目标可以完全被避免。与LFMCW相比,由于MFSK在计算距离与速度时引入了相位差信息,在系统设计只能达到较低信噪比的情况下,其精度会有下降。
3. 快斜波序列雷达
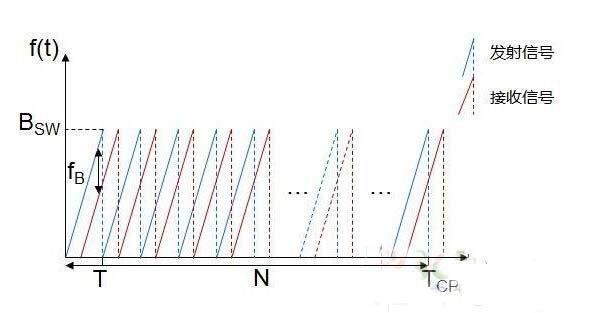
发射机在时间TCPI内连续发射N个斜率很大的锯齿波,每个锯齿波持续时长为T。因为每个锯齿波斜率很大,持续时间很短,因此差拍频率fB主要由雷达信号的传输时间也即fτ的变化而决定。在这种情况下多普勒频移fd可以被近似忽略,即fB=fd+fτ≈ fτ。
在信号处理中,对每个锯齿波内的采样点序列做FFT(一维FFT)之后检测到的差拍频率fB即可直接用来预估距离。而对于相对速度的测量,需要整个 TCPI内发射的所有锯齿波共同参与来反映回波信号的包络变化。 对所有锯齿波的一维FFT结果在另一个维度上再做一次FFT(二维FFT)即可求出多普勒频移fd进而求出相对速度,相对速度可以进一步校正一维FFT对距离的计算结果。
这种波形及后续处理算法对距离和相对速度的求解更直接、准确,同时二维FFT可以进一步提高信号的信噪比从而为后续的检测算法打下良好的基础。同时,很短的单锯齿波持续时间需要更快速的发射调制控制电路,更高的基带采样率,二维FFT算法也需要更强的处理器运算能力,这些对硬件提出了更高的要求。
由上面三种常用的调频体制可以看出,不同的体制在测距、测速性能方面各有优劣,对硬件的能力要求也有所不同。雷达系统设计者需要在一开始仔细衡量选定体制及相应的软硬件架构,才能在后期达到预期的系统性能。
ADI推出的雷达调制锁相环芯片ADF4158/4159芯片可支车载雷达绝大部分主流的调频体制,包括上述的CVS、MFSK、FRCS,以及常规的LFMCW、FSK、CW、Parabolic等。其带宽、周期、调频步数、步频数、调频斜率及波形、FSK、delay等参数都可以方便的配置,结合收发MMIC芯片ADF5901和ADF5904,设计者可以在同一套硬件架构上设计和验证多种调频体制和基带算法。更重要的是,想比用处理器或DAC 来控制调频的方案,基于ADF415x的方案可实现更复杂波型、更简便的控制、更快速的扫频(快至几十uS的斜波序列),更精准的频率控制,以满足后端高精度信号处理要求。
ADF5901和ADF5904是ADI针对24GHz车载雷达推出的MMIC芯片,其功能及指标均按车载24GHz雷达设计。ADF5904更是实现了业界最优的信号探测灵敏度,有厂商基于它实现了额定发射功率下300米以上的车载探测距离,第一次使基于24GHz的ACC自适应巡航或 FCW+ACC双模雷达成为可能。
相对于距离和速度,目标方位角度主要根据回波信号到达不同天线的时间差引起的相位差来测算。接收天线个数越多,角度测量的分辨率越高,但接收天线个数的增加使电路板面积增大。随着MIMO技术在汽车雷达中的应用,利用不同发射天线之间的关系可以模拟更多的接收天线通道,同时又不会造成电路板面积的显著增加,这就要求MMIC芯片必须具有多发多收的能力。ADF5901和ADF5904支持2发4收通道,2个发射通道既可以连接2个不同FOV的发射天线实现双模覆盖,也可以连接2个相同的发射天线实现MIMO功能,即等同于1发8收的效果。随着数字空间滤波技术的发展,数字波束成型(DBF)技术可以将角度测量的精度进一步提高。同样的,DBF需要更多的数据运算,需要更强的硬件能力来支撑。
ADI针对本应用推出的BF70x系列DSP拥有最高400MHz主频和1MB的内部SRAM,并支持外扩DDR2存储器。针对FFT运算,BF70x的两个增强型乘加器可各自在单周期内完成一次32bit或两次16bit的乘加计算。大量经过优化的数学运算函数及蝶形算子等数据可在出厂前固化在内置的ROM中,节省了大量宝贵的内部指令和数据空间。这些特性可以帮助用户在更短的运算时间内实现更加复杂的雷达算法。
ADF5901-ADF5904-ADF415x-BF70x,构成了一套硬件性能优异、软件可扩展的24GHz车载雷达方案,满足以上讨论的主流调频体制及基带算法对雷达硬件架构和数据处理能力的要求。
-
频率
+关注
关注
4文章
1505浏览量
59239 -
雷达
+关注
关注
50文章
2937浏览量
117570 -
数据处理
+关注
关注
0文章
600浏览量
28573
发布评论请先 登录
相关推荐
车载雷达收发调频体制及芯片方案

各位朋友,labview的数据处理能力怎么样?
雷达回波系统的应用研究
一种基于TMS320F206的雷达数据处理系统
一种基于TMS320F206的雷达数据处理系统1
地面雷达数据处理系统设计







 工商网监
工商网监
评论