 基于5G基站与无人机的实验仿真实现最大系统覆盖率
基于5G基站与无人机的实验仿真实现最大系统覆盖率
引言
5G在传输速率和资源利用率等方面较4G系统获得大幅提升,通过大规模波束赋形提供的空间自由度,从而在不需要增加基站密度和带宽的条件下大幅度提高频谱效率。基于波束赋形通信方式将是未来移动通信发展的关键组成部分。
随着无人机技术发展,特别是无人机的飞行高度、移动半径、续航和载重等能力的大幅提升,可以通过机载基站或中继站快速提供给广覆盖能力,成为应付突发性灾害中紧急救援的必要手段。然而单一的无人机网络能量难以支持复杂的信令开销和组网控制,必须考虑通过地面5G基站为无人机与用户之间的波束成形提供大量信令开销,提高系统性能。因此,地面5G基站与高空无人机构成的异构网络成为未来天地一体化通信的重要研究方向。
本文在地面5G基站与无人机构成的异构网络架构下,基于波束扫描和下行链路控制导频复用技术,提出一种可以获得更高波束成形增益的初始波束关联机制,并结合其网络覆盖率数学上下界进行了仿真性能评估。
1 系统模型
1.1 无人机异构网络
异构应急通信网络是由地面公共网络基站和无人机机载基站共同组成的通信网络[6]。如图1所示,地面5G基站提供低频控制信号,完成初始波束接入的控制,空中无人机基站为地面用户提供数据服务。
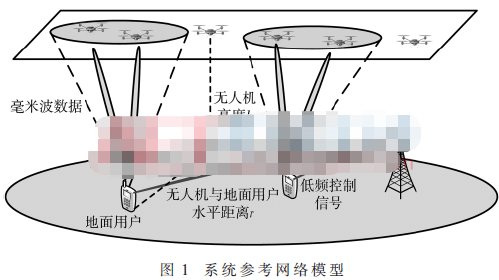
无人机分布在固定高度h平面上,在该高度平面上服从密度为?姿b的泊松点分布,地面用户服从密度为?姿u的泊松点分布。假设所有无人机发射功率均为Pt,用户可以根据需求挑选网络资源形成虚拟小区网络,选择服务的无人机群组中无人机与典型用户的时间的距离表示为x=

其中,r是无人机与典型用户的水平距离,h是无人机分布的平面高度。同时,将无人机分为服务群组Φ1以及干扰群组Φ2。
1.2 信道模型
同时考虑无人机基站与地面用户之间的视距链路(LoS)与非视距链路(NLoS),路损模型可以表示为无人机与地面用户的水平距离r的函数:
1.3 多波束模型
在初始波束关联阶段,采用下行链路训练模型机制,即典型用户与每个无人机基站之间对其存在波束进行穷举搜索,目的在于使典型用户在一个特定方向上选择最大化某个度量的波束对组合。该特定方向被确定之后,典型用户会与该方向上的所有无人机基站进行连接以完成后续的数据传输。采用分层搜索的方法可以进一步解决穷举方式带来的高训练开销代价,相应的下行链路传输数据波束成形过程通过两个步骤来调整:
(1)控制波束搜索阶段。将使用宽波束成形矢量在搜索过程中找到最佳的波束成形组合对;
(2)数据波束搜索。将上一步控制波束搜索阶段得到的最佳控制波束成形联合对进一步细化,用于后续数据传输过程。
无人机基站侧有效的波束成形增益Db表示为:
其中,A1和A2分别表示服务群组和干扰群组无人机的波束宽度,Pt表示无人机发射功率,Du、Db分别表示用户和无人机基站的波束成形增益, l(ri)表示第 i个无人机基站与典型用户之间的路径损耗,Si表示第i个无人机基站与典型用户之间的小尺度衰落,独立加性高斯白噪声表示为z。
2 初始波束联合模型
当典型用户与虚拟小区建立初始物理链路连接时,初始的多波束联合是必不可少的过程。参考图2所示流程模型,地面基站以低频段信号控制无人机高频段基站,与地面用户完成初始多波束接入过程。其主要步骤如下:
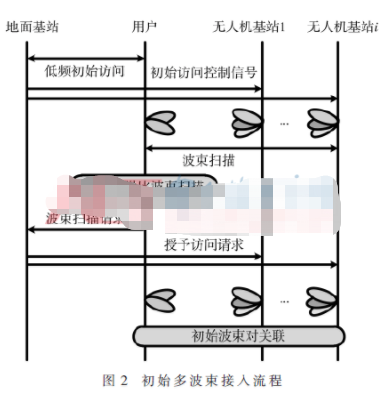
(1)类似于传统的地面网络,地面基站通过低频信号广播初始接入信令;
(2)地面用户向无人机基站发送大致位置信息以完成后续波束成形控制;
(3)无人机基站采用的波束扫描策略和波束切换原理,将波束对的信息发送到地面基站;
(4)地面基站做出波束对决策并将其转发给典型用户和无人机基站;
(5)典型用户与无人机基站完成初始的多波束接入以进行数据传输。
在典型用户与无人机基站的初始波束匹配阶段,采取最大化信噪比(max SNR)方法作为波束对匹配的决策准则。典型用户会利用每个波束成形组合对来计算合成SNR,然后将数据发送阶段中使用的最大SNR的波束对作为最佳波束对进行匹配。该过程中,假设每个波束对传输持续时间足够用来计算出典型用户处的接收能量。
式中,n和m分别表示典型用户和无人机基站波束,n=1,2,…,Nu,m=1,2,…,Nb。后续数据传输阶段,典型用户和其服务基站簇内的无人机基站采用式(6)中所获得的波束成形组合波束图谱进行波束匹配过程,以节约资源开销。该过程中不管移动用户数量如何变化,下行链路的穷举检索方法进行波束扫描的处理过程保持不变。移动用户的数量并不会影响最佳波束对匹配的结果,减少资源开销的初始波束训练和联合过程模型同样适用于多用户波束系统。
3 系统覆盖率
定义大于阈值T的典型用户接收信干噪比SINR概率为P(T),用以表示初始波束关联阶段无人机异构网络覆盖率性能。
在单路信道模型和典型用户的零旁瓣增益假设下,当且仅当典型用户接收增益为主瓣增益时,典型用户接收SINR大于零。引入两个基本事件:
(1)最佳波束对(OBP)匹配事件:在此事件下,波束关联时所选波束成形/组合对对应无人机基站和典型用户波束成形增益最大值,即:OBP={Db=Gb,Du=Gu};
(2)次优波束对(SBP)匹配事件。在此事件下,波束关联时所选波束成形/组合对不能达到无人机基站和典型用户波束成形增益最大值,即SBP={Db=Gb,Du=gu}。
考虑到这两种仅有的非零SINR覆盖率情况,将系统覆盖率范围概率公式改写为下式:

在下行链路的波束训练中,分配给无人机基站的控制导频序列是典型用户用来区别服务基站和其他基站信号的重要依据。因此,为保证典型用户的接收到的服务基站信号中没有干扰,将正交导频序列分配给所有的无人机基站,每个位置上的无人机基站随机复用控制导频。将控制导频复用因子在[0,1]之间取值,即每个无人机基站具有独立同分布概率与服务基站具有相同的导频。为了简化分析,仅考虑导频复用的两个特殊情况,即系统覆盖率的上下界。
3.1 系统覆盖率上界
当控制导频因子等于0时,系统控制导频数量趋于无穷大,小区内的所有无人机基站复用不同的正交导频,典型用户能够从接收到的信号中准确分辨服务信号与其他信号。在准正交导频的情况下,干扰功率相对于噪声功率可以忽略不计,系统覆盖率P的上界表示为:
证明过程如下:
由于无人机基站在空间内固定高度服从泊松点过程分布,因此无人机基站与地面用户之间的水平距离r的概率密度函数可以表示为:
3.2 系统覆盖率下界
当控制导频因子等于1时,系统控制导频数量等于1,小区内的所有无人机复用同样的导频,典型用户不能有效区别服务信号与其他信号。波束匹配过程中,典型用户将对接收到的总功率(信号加干扰)进行匹配判决。为了简化分析,假设典型用户与服务无人机基站进行波束训练匹配的过程与其他无人机基站使用随机波束成形向量发送数据的过程同步。
由于波束关联过程中的相同导频被所有基站复用,不可避免会产生波束对误差,从而影响SINR覆盖率范围。为了更好分析该情况下的系统性能,对OBP进行更深入的定义,即:当最优波束对方向上最优化波束对形成增益的总功率大于典型用户任何其他方向上的总功率时,发生OBP事件,相应的OBP事件表达为:

式中,Im(m=1,2,…,Nu)表示第m个波束向量信道上的干扰功率,同时上式中假设非一般性情况下,即第1个波束向量信道r1被选中为服务信道,此时该服务基站与典型用户之间达到最大的波束增益传输。假设典型用户的旁瓣增益为零,当导频复用因子为1时,典型用户接收到的其他干扰基站发送数据的增益也为零,从而假设SBP事件不发生。该情况下,当发生完全OBP事件时,系统覆盖率性能下界Pc的表达式为:
4 、仿真评估
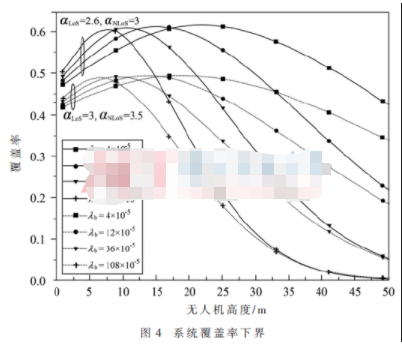
仿真参数设置中的加性路损因子γLOS和γNLOS分别被假设为1 dB和10 dB,环境常数x、y分别设为11.85和0.136,有效波束成形增益常数C=2,路损系数αLOS和αNLOS分别为2.5和3.7,SINR的阈值设为0 dB。
通过仿真对系统覆盖率性能进行验证。根据前述推导,得出系统覆盖率上下界与无人机分布高度之间的关系,如图3和图4所示。同时获得系统覆盖率随着不同的无人机基站密度、不同的波束宽度和不同路损模型下的变化规律。
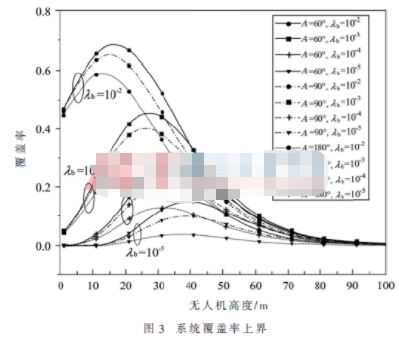
由图3可以看出:
(1)当无人机基站密度逐渐增大时,系统覆盖率也随之增大。说明随着无人机基站数量增加,信道多样性增加,根据用户为中心网络的多样性增益,系统覆盖率也相应增大。
(2)对于同样基站密度与波束宽度条件下的系统覆盖率而言,随着无人机基站挂高的增加,无人机基站与典型用户之间的视距链路概率也逐渐增大,但由于无人机挂高增大,基站与用户之间的距离增大。因此,在系统覆盖率表示的信道质量上出现最优挂高点的折中。
(3)随着无人机基站密度的增加,无人机最优部署高度也逐渐降低,这是由于基站密度越大,用户处接收到的同频干扰也就越强,因此其最优高度越低。
(4)由于本文对系统做出不考虑用户旁瓣增益的假设,且在准正交导频复用机制下,用户与无人机基站之间存在最佳波束匹配,因此波束宽度对于系统覆盖率的影响较为明显。由图3可以看出,波束宽度越小,有效波束成型增益也就越大,覆盖率相应增加。
由图4可以看出:越密集的无人机基站分布给系统带来越大的覆盖率增益。随着无人机基站高度的增加,系统达到最大覆盖率,这是由于随着无人机基站升高,无人机基站与典型用户之间的链路情况越来越理想,视距链路概率增加。但随着无人机基站挂高不断增加,无人机基站与典型用户之间的距离也随之增加,信号强度减弱,覆盖率也相应下降。
5、结论
本文重点研究5G无人机异构网络下的全导频复用机制的系统覆盖率性能,并给出了系统覆盖率的上下界数学表达式。通过性能仿真结果获得实现最大系统覆盖率的无人机挂高和部署密度,为无人机部署方案的实际工程实现提供了理论依据。同时,在初始波束匹配阶段,通过最大化信噪比(max SNR)方法作为波束对匹配的决策准则,该方法中典型用户和其服务基站簇内的无人机基站采用波束匹配阶段的波束成形组合图谱进行波束匹配,达到了节约资源开销的目的。
责任编辑:gt
-
仿真
+关注
关注
50文章
4124浏览量
133874 -
无人机
+关注
关注
230文章
10515浏览量
181812 -
5G
+关注
关注
1356文章
48503浏览量
565520
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论