 基于SJA1000和PCA82C250控制器实现汽车控制系统的设计
基于SJA1000和PCA82C250控制器实现汽车控制系统的设计

前言
CAN现场总线是20世纪80年代初德国BOSCH(博世)公司在为解决汽车中众多的控制与测试仪器之间的数据交换而开发的一种通信协议。由于CAN总线具有突出的可靠性、实时性和灵活性,因而得到了业界的广泛认同和运用,并在1993年正式成为国际标准和行业标准,被誉为“最有前途的现场总线”之一。以CAN为代表的总线技术在汽车上的应用不但减少了车身线束,也提高了汽车的可靠性。在国外现代轿车的设计中,CAN已经成为必须采用的技术,奔驰、宝马、大众、沃尔沃及雷诺等汽车都将CAN作为控制器联网的手段。我国目前CAN总线技术在汽车上的应用存在着很大的空白,在电动汽车上应用CAN总线技术研究尚处于起步阶段。
电动汽车融合了许多的电子控制系统,如电池管理系统、电机控制系统、驱动控制系统、再生制动系统及ABS系统等。电子设备的大量应用,必然导致车身布线增长且复杂、运行可靠性降低、线路上的功率损耗加大、故障维修难度增大。特别是电子控制单元的大量引入,为了提高信号的利用率,要求大批的数据信息能在不同的电子单元*享,汽车综合控制系统中大量的控制信号也需要实时交换,传统线束已远远不能满足这种需求。将CAN总线技术引入电动汽车可以克服以上缺点,具有广阔的应用前景。文中将CAN总线技术应用到电动汽车控制系统,并采用通用扩展单元解决电动汽车电控系统的电路设计复杂性的问题,优化组合各电控单元信息以实现充分信息共享,达到提高电动汽车控制系统性能的目的。
二、CAN总线的特点
CAN属于现场总线范畴,是一种有效支持分布式控制或实时控制的串行通信网络。CAN总线在工业控制领域广泛应用得益于其自身的技术特点。
(1)只需通过报文滤波即可实现点对点、一点对多点及全局广播等几种方式传送接收数据,无须专门的“调度”。
(2)通信方式灵活。CAN为多主方式工作,网络上任一节点均可在任意时刻主动地向网络上其他节点发送信息,而不分主从且无须站点地址等节点信息。
(3)CAN采用非破坏性总线仲裁技术,当多个节点同时向总线发送信息时,优先级较低的节点会主动地退出发送,而最高优先级的节点可不受影响地继续传输数据,从而大大节省了总线冲突仲裁时间,尤其在网络负载很重的情况下也不会出现网络瘫痪情况。
(4)采用短帧格式通信,传输时间短,受干扰概率低,具有极好的检错效果。每帧字节数最多8个,可满足通常工业领域中控制命令、工作状态及测试数据的一般要求。同时,8B也不会占用过长的总线时间,从而保证了通信的实时性。
(5)CAN的每帧信息都有CRC校验及其他检错措施,保证了数据通信的可靠性。
三、CAN总线在电动汽车上的应用
CAN总线应用于电动汽车上具有以下优点。
(1)减少各功能模块所需的线束数量和体积。
(2)减少整车质量并降低汽车成本,具有较高的数据传输可靠性和安装便捷性,扩展了汽车功能。
(3)一些数据如车速、电机转速和SOC等能够在总线上共享,因此去除了冗余的传感器,使传感器信号线减至最少,控制单元可做到高速数据传输。
(4)可以通过增加节点来扩展功能,如果数据扩展增加新的信息,只需升级软件即可。
(5)实时监测并纠正由电磁干扰引起的传输错误,并在检测到故障后存储故障码。
目前存在的多种汽车网络标准,其侧重的功能有所不同,为方便研究和设计应用,SAE车辆网络委员会将汽车数据传输网划分为A、B、C3类。
A类面向传感器/执行器控制的低速网络,数据传输位速率通常只有1~10kb/s。主要应用于电动门窗、座椅调节和灯光照明等控制。
B类面向独立模块间数据共享的中速网络,位速率一般为10~100kb/s。主要应用于电子车辆信息中心、故障诊断、仪表显示和安全气囊等系统,以减少冗余的传感器和其它电子部件。
C类面向高速、实时闭环控制的多路传输网,最高位速率可达1Mb/s,主要用于悬架控制、牵引控制、先进发动机控制和ABS等系统,以简化分布式控制和进一步减少车身线束。到目前为止,满足C类网要求的汽车控制局域网只有CAN协议。
四、方案设计
1. 系统原理图
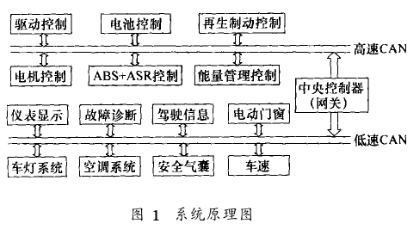
该系统主要由驱动控制模块、再生制动控制模块、电机控制模块、能量管理模块、电池控制模块、仪表显示模块及故障诊断模块等组成。通过CAN实现各个控制模块间的信息通信。除了指令的发送和接收外,汽车的一些基本状态信息(如电机转速、电池荷电状态、车速等)是大部分控制单元必须获取的数据,控制单元采用广播方式向总线发送数据。
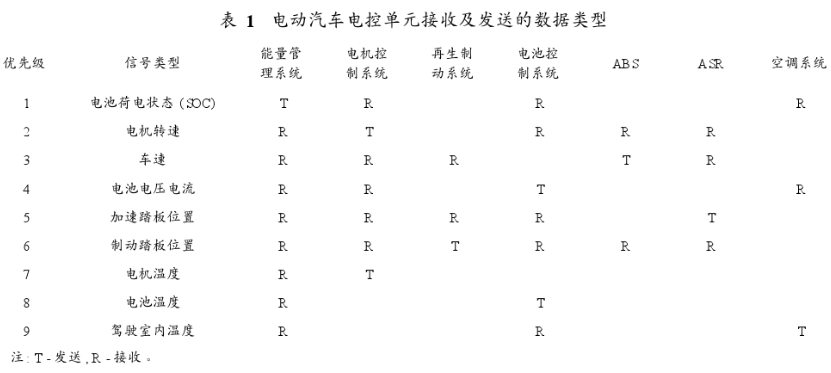
如果在同一时刻所有控制单元都向总线发送数据,将发生总线上的数据冲突,因此,CAN总线协议提出了用标识符识别数据优先权的总线仲裁。表1给出了电动汽车电控单元接收及发送的数据类型及其它单元对这些信息共享的程序。
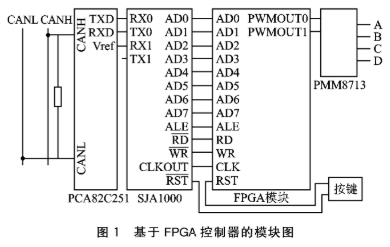
2. 模块单元电路框图
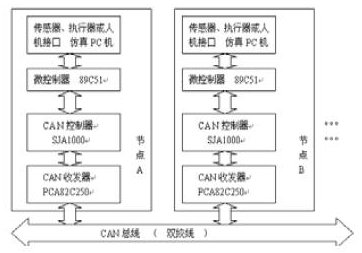
在对高速CAN上的节点进行硬件设计时采用通用扩展单元(UDU)。这样只需通过改变软件来实现各节点的不同功能,从而简化了硬件系统设计。
通用扩展单元结构如图2所示。
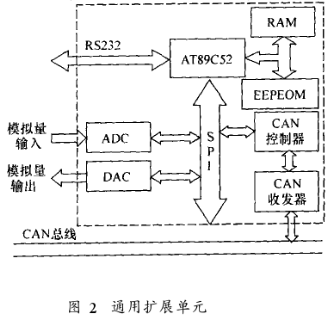
它是一个低电压、高性能的CMOS8位单片机,片内含8kB的可反复擦写的只读程序存储器(EPROM)和256B的随机存取数据存储器(RAM),兼容标准MCS251指令系统,片内置通用8位中央处理器和Flash存储单元,可适用于许多较复杂系统的控制应用场合。
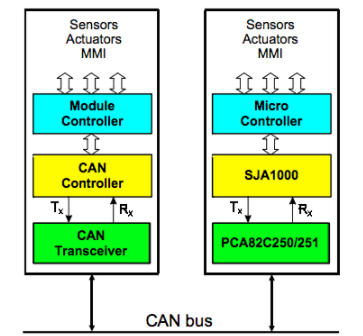
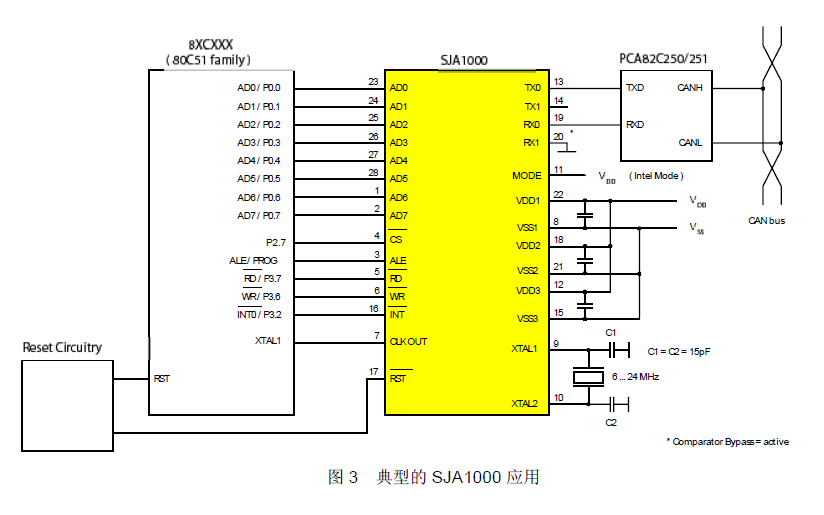
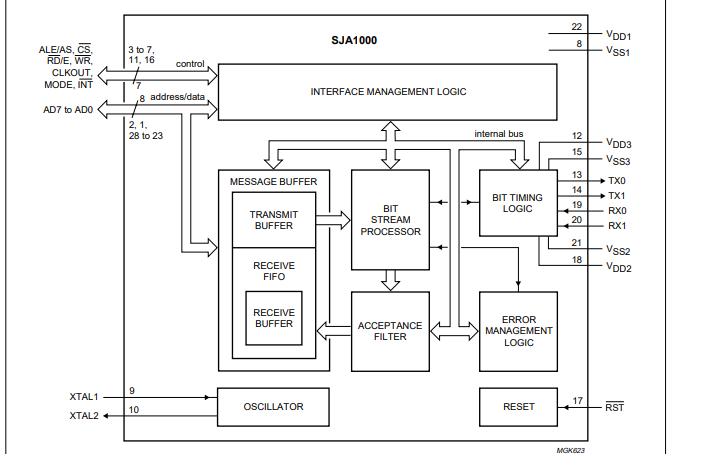
CAN控制器采用Philips公司生产的SJA1000,它是应用于汽车和一般工业环境的独立CAN控制器,具有完成CAN高性能通信协议所要求的全部必要特性,具有简单总线连接的SJA1000可完成物理层和数据链路层的所有功能。它可以存储一条将在CAN总线上发送或接收的完整报文,另外具有64字节扩展接收缓冲区REFIFO,接收缓存更大,在微控制器处理一个报文的同时可以继续接收其它发来的报文。
总线收发器采用PCA82C250,它提供协议控制器和物理传输线路直接的接口,可以用高达1Mb/s的速率在2条有差动电压的总线电缆上传输数据。
最多挂接节点数可达110个。采用PCA82C250可以增大通信距离,提高系统瞬间抗干扰能力,降低射频干扰。PCA82C250和SJA1000共同组成CAN总线的控制和接口电路。
3. 电池管理控制系统设计
蓄电池对电动汽车而言是影响整车性能的一个关键因素,它对续驶里程、加速性能和最大爬坡度等性能都会产生直接影响。电池控制系统主要是监控电池的工作状态(电池电压、电流和温度),管理电池的工作情况(避免出现过放电、过充、过热和单体电池之间电压严重不平衡现象)以便最大限度地利用电池的存储能力和循环寿命。其结构如图3。
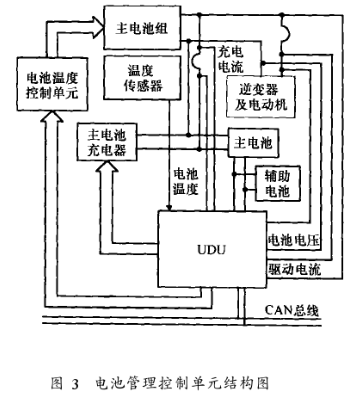
该系统主要实现以下功能。
(1)对主辅电池进行实时监控通过UDU采集主辅电池充放电过程中的电池电压、电流和电池温度,来监控电池的工作状况并进行故障诊断。
(2)UDU接收来自总线的汽车行驶状态数据根据汽车动力需求实时调整电动机转速及功率输出;当收到制动信息时,控制单元调控逆变器和电动机的动作,启动再生制动系统回收制动能量。
(3)预测电池剩余电量和相应的剩余行驶里程控制单元把采集到的充放电电流参数采用相应的算法预测剩余电量。同时利用从总线上接收的车速信息估算剩余行驶里程,并把估算结果通过总线发送到仪表显示单元。
4. 系统可靠性设计
由于汽车内温度变化范围大(-45~100℃),电磁干扰和其它电子噪声强,环境恶劣,要保证系统在车内运行的可靠性,就必须提高网络结构自身的容错能力和抗干扰能力。
在设计时采用软硬件结合的方法进行抗干扰。
硬件方面采用电磁兼容设计,重点处理静电场、磁场和传输线路及电路引入的干扰,采用滤波、去耦、隔离、屏蔽和接地等方式,加入电源电压检测、看门狗等电路。具体措施如下。
(1)传输线采用屏蔽双绞线。
(2)用看门狗定时器进行超时复位。
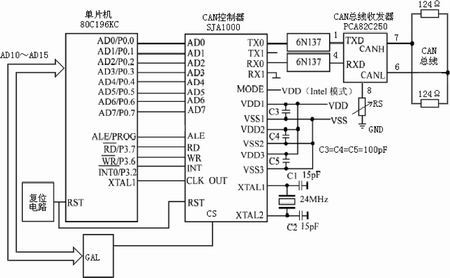
(3)在CAN控制器SJA1000和CAN收发器PCA82C250之间增加了由高速隔离器件6N137构成的光电隔离电路,电源也采用微型DC/DC模块来进行隔离。
(4)将PCA82C250的CANH和CANL分别通过一个5Ω的电阻与CAN总线相连,可起到限流作用,保护PCA82C250免受过流冲击,CANH和CANL分别并联一个30pF的电容接地,也可过滤总线上的高频干扰。
(5)传输介质的损坏或总线驱动器的损坏等都会破坏CAN的可靠通信,这些故障如不能自动检测并采取相应措施排除,将使系统部分甚至完全失去通信能力。解决这一问题的有效途径是采用冗余通信控制,从而保证通信系统主要功能正常运行,以此提高系统的可靠性。
软件方面采用比错和容错等技术,对信号进行软件滤波,设计上电复位抗干扰程序,运用实效保险等技术设计抗瞬间干扰程序等。
五、结束语
介绍CAN总线的特点及在电动汽车上的应用,设计了基于CAN总线的电动汽车整车控制系统的节点设置,并引入通用扩展单元简化了系统硬件设计,对影响电动汽车性能的电池管理控制单元进行了优化设计。该系统具有结构紧凑、可靠性高、功能完善和成本低的优点,能够较好地满足电动汽车的工作要求。
责任编辑:gt
-
控制器
+关注
关注
114文章
17909浏览量
195723 -
控制系统
+关注
关注
41文章
6998浏览量
114546 -
CAN
+关注
关注
59文章
3106浏览量
473798
发布评论请先 登录
基于SJA1000的完整CAN节点设计
CAN控制器SJA1000及其应用
PCA82C250 CAN收发器应用指南
SJA1000独立的CAN控制器应用指南
基于CAN控制器SJA1000的智能高速控制系统设计
CAN总线控制器SJA1000中文资料
PCA82C250 CAN总线控制器数据手册 10页 0.1M
基于SJA1000芯片和PCA82C250芯片实现总线节点仿真平台设计
SJA1000独立CAN控制器的应用指南资料免费下载
SJA1000独立控制器的数据手册免费下载
基于FPGA的VHDL语言设计控制器SJA1000的IP软核设计



评论