 采用操作系统μC/OS-Ⅱ实现数控执行控制器的系统设计
采用操作系统μC/OS-Ⅱ实现数控执行控制器的系统设计

嵌入式操作系统μC/OS-Ⅱ是一个可裁剪、源码开放、结构小巧、抢先式的实时多任务内核,主要面向中小型嵌入式系统,具有执行效率高,占用空间小,可移植性强,实时性能优良和可扩展性强等特点。数控系统是一个典型的强实时性系统,具有可确定性。可确定性主要是确保条件出现到由此引起的动作开始(或者结束)的时间在一个准确的时段内。在数控系统中,条件是由操作员的指令(如:紧急停止、移动x轴等)或是机床的状态(如刀具破损等)引起的。本文分析了数控系统任务的特点,结合μC/OS-Ⅱ的内核体系,对μC/OS-Ⅱ的任务分类、任务调度和中断服务策略做了改进,使其更加适合于数控系统的应用。
1、 μC/OS-Ⅱ对任务的分类
μC/OS-Ⅱ中每个任务有5种状态:休眠(DORMANT)、就绪(READY)、运行(RUNNING)、等待(WAITING)、中断(ISR)。休眠状态的任务驻留在存储器中,还未被内核使用;就绪状态的任务准备执行,优先级低于当前执行的任务,没有得到CPU控制权;任务得到CPU控制权后就处于运行状态;等待事件发生的任务处于等待状态,事件可以是I/O操作完成、共享资源可以利用、时钟周期到等;任务执行过程被中断服务例程中断,任务就处于中断状态。
2 、μC/OS-Ⅱ面向数控系统的改进
2.1 数控系统任务的特点
在数控系统中,任务可分为两种:周期运行的任务和信号触发运行的任务,这里所说的信号即包括硬件信号,也包括软件信号。周期运行的任务有定时信号采样、定时I/O口扫描、定时通信等。信号触发运行的任务有中断信号(硬件信号)触发的中断服务任务,命令消息信号(软件信号)触发的命令解释任务等。另外,数控系统中,有些任务还具有运行时间短,运行频率高,要求实时性高的特点,如信号采样、数控机床中的插补控制等。
2.2 改进后的任务划分
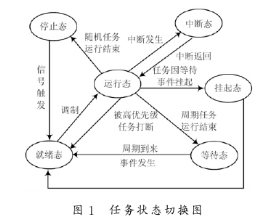
在改进后的嵌入式操作系统中任务分为两类:普通任务和抢占式任务。普通任务指通过操作系统调度器调度运行的任务,调度方法如图1所示;抢占式任务指那些不通过调度器调度运行,而是在中断处理中直接运行的任务。下面详细说明这两种任务。
2.2.1 普通任务
根据数控系统任务多为周期任务和信号触发任务这一特点,将普通任务分为两种:定时运行的周期任务(简称周期任务)和信号触发运行的随机任务(简称随机任务)。相应的,任务状态被划分为6种:运行态、就绪态、等待态、停止态、挂起态和中断态。图1为改进后的任务状态切换图。
在这六种状态中,运行态、就绪态和中断态对应μC/OS-Ⅱ的READY,RUNNING和ISR;挂起态是任务在执行完成前,因等待某事件或资源而被迫停止运行,等待事件或资源到来的状态;等待态是周期任务完成一次运行,等待运行周期到再次运行时的状态;停止态是随机任务等待其触发信号的状态。这里去掉了休眠态,即没有任务的删除,所有的任务一旦建立,在系统运行期间一直存在。这样的处理是因为在数控系统应用中,所有建立的任务一定是有用的,即在系统运行期间一定会被执行,无用的代码和任务不会被添加。在μC/OS-Ⅱ中,设定每个任务都是一个无限的循环,即任务函数永不返回,这样做是不合适的。该操作系统允许任务函数返回,返回后调用函数OSTaskEndDeal(),该函数根据任务的类别,把周期任务放入等待队列,把随机任务放入停止队列。
2.2.2 抢占式任务
抢占式任务为执行时间短且执行频率高于OS系统时钟频率(如信号采样),或实时要求高(如数控机床中的插补控制)的任务。调度任务时间(主要是任务切换所花费的时间)往往比这类任务运行一次的时间还多,这显然是不合理的,抢占式任务正是为解决这种不合理而设计的。抢占式任务不通过OS调度器调度运行,也不采用TCB(任务控制块)标识它们,而是在它们的中断触发信号到达时,在中断中_直接处理,这样做节省了调度、任务切换的时间。但是,由于抢占式任务没有TCB,也就没有相应的任务堆栈,所以抢占式任务在使用资源上要特别注意:一定要使用独立的资源。这样既可以使抢占式任务正常运行,又可以避免抢占式任务对被中断程序的环境造成破坏。具体办法如下:
(1)专用寄存器组。若处理程序中使用了寄存器,则为其分配专用的寄存器组,这样也省去了保存/恢复寄存器的时间消耗。
(2)全局变量。因为函数内部的局部变量是分配在堆栈中的,直接处理方式不形成任务,没有自己的堆栈,如果使用局部变量,其局部变量会分配在被中断任务的堆栈内,所以在该方式下任务应使用全局变量。用户在设计抢占式任务时要有一定限制,否则会影响系统的响应时间。具体限制如下:第一,数量不能太多,最好小于等于3个;第二,必须是执行时间短,执行频率高的任务才能被设为抢占式任务。
3 、需要修改的内核数据和函数
3.1 任务控制块的修改
(1)修改OSTCBDly的含义。在μC/OS-Ⅱ中,OSTCBDly表示任务延时的时钟节拍数,或者任务挂起时的超时时钟节拍数。如果这个变量为0,则表示任务不延时,或者表示等待事件发生的时间没有限制,修改后,OSTCBDly描述任务自运行的周期数,其计算公式如式(1)所示。若该项为零,任务为信号触发的随机任务。
(2)在TCB增加一项OSTCBDlyD作为任务自运行周期动态值。
INT16UOSTCBDlyD; /*任务自运行周期动态值*/其中,OSTCBDlyD是任务等待运行时间的动态值。若任务在等待态,其初值为OSTCBD-ly;若任务为挂起态,其初值为超时限制值。系统时钟处理函数OSTimeTick()对OSTCBDlyD减1,当OSTCBDlyD小于0时,则将该任务放入就绪队列。
(3)增加OSTCBStat的取值。OSTCBStat是任务的状态字。由于增加了停止态和等待态两种任务状态,因此需要增加OSTCBStat的取值,具体修改是在文件μCOS_II.H中增加下面信息。
#define OS_STAT_wAIT 0x40 //任务状态字为等待态
#define OS_STAT_STOP 0x80 //任务状态字为停止态
3.2 时钟节拍函数的OSTimeTick()修改
通过TCB数组扫描全部TCB,根据OSTCBStat的值做不同处理,具体处理如下:
就绪态的任务,OSTCBDlyD--,若有超时,则进行超时处理。
挂起态的任务,OSTCBDlyD--,若有超时,则将其插入就绪表。
等待态的任务,OSTCBDlyD--,若到时,则将其加入就绪表。
运行态的任务和停止态的任务,不做处理。
3.3 增加函数OSTaskEndDeal()
当前任务的函数运行完返回时,调用函数OSTaskEndDeal(),该函数完成工作:首先调用OSTaskStkInit()将该任务的堆栈初始化;然后判断任务是否为最低优先级任务,若是,则保持该任务在就绪态,这样做的目的是使最低优先级任务始终处于就绪态,就绪表不会为空。若否,则根据OSTCBCUR→OSTCBDly决定任务该插入哪个队列,该值等于零,任务进入停止状态;
不等于零,任务进入等待状态。最后,调用OSStart()选择新任务运行。
3.4 抢占式任务的实现
抢占式任务的设计需要根据实际情况做处理,这里以数控系统中的插补控制为例介绍抢占式任务的实现。
3.4.1 插补控制任务的功能
插补控制任务是根据加工命令和当前点的位置,实时计算各坐标轴运动的位移和方向。插补时需要用一个定时器作为插补速度的控制,每次定时中断触发一步插补运算和输出,当插补到终点,定时器停止,插补完成。
3.4.2 插补控制任务的实现
(1)选择一个硬件定时器作为插补专用定时器,将插补任务的代码放入该硬件定时器的中断服务程序中。
(2)为该中断设置一组专用的寄存器组,以减少中断环境保存和恢复的时间。
(3)将需要执行插补任务的当前位置值和加工命令(如:加工曲线线形、终点值)等信息定义成全局变量,以便与其他任务实现快速的信息交互。
(4)插补控制任务的启动。根据插补速度设定定时器初值,初始化插补所用的全局变量,启动定时器。
4、 基于改进后的μC/OS-Ⅱ的数控机床执行控制器的软件设计
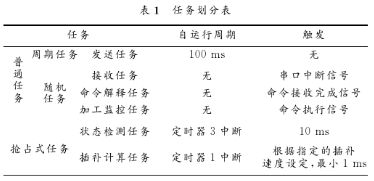
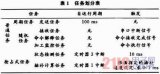
数控机床系统采用两级结构。上位机由专用软件IPC构成,用于实现人机交互;下位机由C8051020及其外围电路的嵌入式执行控制器构成,负责实时、可靠的控制。嵌入式执行控制器软件基于改进后的μC/OS-Ⅱ设计,主要包括下面一些功能:与IPC的通信(发送任务和接受任务)、命令解释(命令解释任务)和命令执行(加工监控任务、插补计算任务、间隙电压检测和限位开关状态检测任务)。其中,通信有发送和接收两方面内容;命令解释时,对开关量控制命令直接执行;命令执行中需要进行插补计算、检测间隙电压和限位开关状态及加工监测。各任务具体设计如表1所示。
5 、结语
本文根据数控系统任务特点,对μC/OS-Ⅱ的任务划分和任务调度做了改进,更加方便数控系统任务的在μC/OS-Ⅱ上的添加,同时也便于μC/OS-Ⅱ对不同任务的管理。抢占式任务减少了任务切换花费的时间,并提高了硬件资源的利用率,但应注意抢占式任务的数量不能过多,最好小于等于3个,否则会影响OS正常运行。改进后的内核已应用到了实际项目中,系统稳定可靠。
责任编辑:gt
-
控制器
+关注
关注
114文章
17907浏览量
195707 -
嵌入式
+关注
关注
5211文章
20737浏览量
338337 -
操作系统
+关注
关注
37文章
7452浏览量
129692
发布评论请先 登录
uC/OS-Ⅱ的主要特点
如何将嵌入式操作系统μC/OS-Ⅱ面向数控系统改进?
嵌入式操作系统μC/OS-Ⅱ在数控系统应用怎么改进?
基于uC OS和双MCU的数控系统研制
采用μC/OS-Ⅱ的数据采集系统设计与应用
浅谈嵌入式操作系统μC/OS-Ⅱ面向数控系统的改进
嵌入式操作系统μC/OS-Ⅱ面向数控系统的改进
嵌入式实时操作系统μC/OS-Ⅱ在LPC1788上的移植及应用




评论