 采用AT90CAN128单片机实现无线远程监控系统的设计
采用AT90CAN128单片机实现无线远程监控系统的设计
1.引言
目前,工程机械不仅力求采用内部网络来解决各个系统间进行数据交换的问题,尤其因为需要经常工作在偏远地区,工程机械希望结合电子通讯等行业,采用发高性价比的设备来实现远程监控功能。针对网络化的要求,汽车行业已经开始引入现场总线,并且形成了统一的标准— J1939标准,并且相关的产品系统逐渐进入国内市场;而短消息服务业务 SMS作为 GSM网络的一种基本业务,具有:永远在线;不需拨号;价格较便宜;覆盖范围广等特点,特别适用于小流量的数据传输的应用。 GSM短信业务、J1939数据采集、无线监控系统都是近年来研究的热点问题,但是将三者结合起来的设备在国内为数不多。将三者集合起来,不仅可以解决单点的实时监测,更贯穿密集的网络上各个节点,使结构更加灵活,又可以进一步降低成本。本文设计的远程监控系统就是综合了以上三者的在工程机械上的一个应用。安排设计了一个安装在工程机械上的装置,带有符合 J1939标准[6]的 CAN总线接口以读取总线上发动机工作状态,然后将这些信息定时通过GSM短信形式发送出去的监控系统,对工程机械的使用有很多实际意义。整体系统实现了对发动机参数进行实时显示与发送的功能,用户不仅可以根据需要实时监测发动机状况,而且可以把相关参数以短消息形式发送给监控中心,完成远程监控,并且可以保存作为后期研究比较的依据。
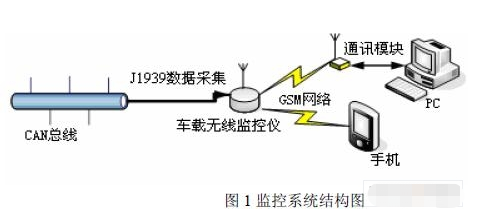
2.系统硬件结构本课题所设计的监控系统是基于 GSM的短信业务,并且采用 AT90CAN28作为控制器来实现远程监控的。总体结构图如下图 1:
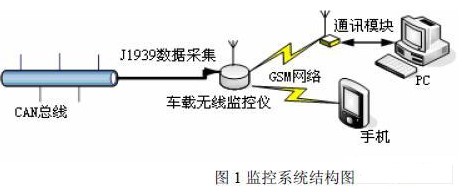
设计中主要研究的是监控系统终端的硬件设计,其中监控中心可以是用户手机也可以是载有 GSM模块的 PC。
2.1、监控终端的硬件模块化设计硬件结构图如图 2
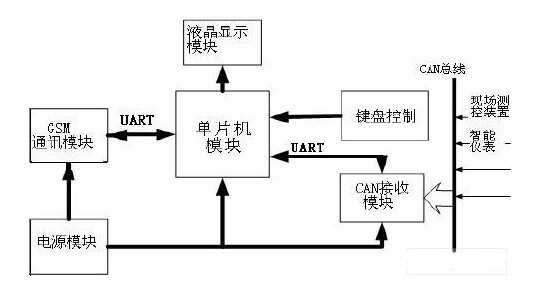
硬件设计时采用了模块化思想,将监控终端分成五大模块:电源、J1939数据采集、 GSM短信模块、人机界面(包括键盘和液显)和控制模块。
控制模块使用的单片机是 AVR出产的具有 RISC 内核的 8位低功耗 CMOS微处理器,典型特点:内置 CAN控制器,显著的节省了硬件资源 ,简化了程序代码。而短信模块选择的是西门子公司的GSM/GPRS模块MC35i;液晶显示模块则是选用了北京青云 LCM12864ZK,可显示四行,每行 8个汉字。
a) 供电部分
由于 MC35i的工作电压范围是 3.3-4.8V,当 MC35i模块启动后,经过几秒的延时,模块开始搜索网络,这时需要超过 2A的驱动电流(时间很短微秒级),如果驱动不足,会引起模块的突然掉电;车载电源输出一般是 24V但是波动很大,低压可以到 12V高压可以达到 40V ,为了更好的给单片机和通信模块供电,选择宽输入 DC-DC模块 PS12W24DC5D,输出电压稳定在 5V左右,昀大提供电流为 2.4A,只要加一个二极管降压就可以得到满足通讯模块要求的电压输出,可以避免当模块搜索网络时驱动电流不足的问题。并且在电压输出端并联一个大电容 22uF,起蓄流的作用,也能起到提高驱动电流的作用,解决了驱动不足时掉电的问题。
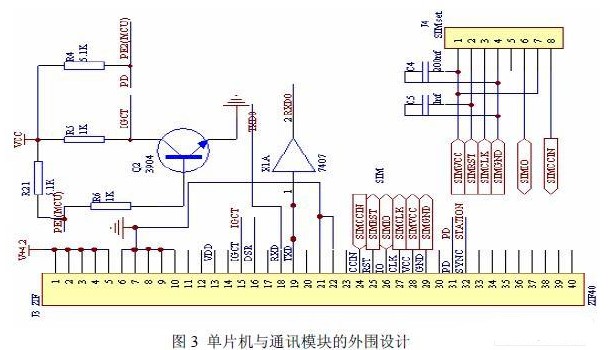
b) 单片机与通信模块的外围设计
通信模块 MC35i模块[4]有 40个引脚,通过一个 ZIF(零阻力插座)连接器引出。这 40个引脚可以划分为 5类,即电源、数据输入 /输出、SIM卡、音频接口和控制。主要电路有:
①、开启与关断电路:
在接通电源后,MC35i 并不能自动启动,需要上电后在其 15引脚 IGT上提供 100 ms的低电平 MC35i才能正常启动。为了保证在复位以及人为操作时都可以是模块激活,选择了加了三极管反相控制的由单片机 PE1控制的开启电路。至于关断在正常状态下采用软件 AT指令实现,故障期间硬件强制关断则是控制 PD引脚低电平时间大于 3.5s。
单片机与通信模块是通过串口通信的方式进行信息传输的,如图 3,通信模块 MC35i的 16-23引脚数据输入 /输出端的 8个引脚分别为 DSRO,RINGO,RXDO,TXDO,CTSO, RTSO,DTRO,DCDO,它有固定的参数 :8位数据位和 1位停止位,无校验位,波特率在 300-115000bps之间可以选择,这里选择默认的 9600bps作为数据传输的波特率,硬件握手信号用 RTS/CTS,模块串口支持标淮的 AT命令集。单片机的串口要和 MC35i模块串口相连,但由于 MC35i模块的串口高电平是 2.65V,单片机的串口高电平为 5V,因此 RXD\TXD脚不能直接和单片机相连,可以采用采用 TI公司的电平转换芯片 LVC245解决上述问题;设计中采用实际与理论相结合的方式,在从 MC35i到 MCU的方向加了驱动门电路 7407。
②、SIM卡电路:
模块的24-29管脚为SIM卡引脚,分别为CCIN,CCRST,CCIO,CCCLK,CCVCC, CCGND,其中 CCIN引脚用于检测 SIM卡插槽中 SIM卡是否插入正常,如果正常插人, CCIN脚会输出高电平,如果插人异常,CCIN引脚会维持低电平,模块会在 CCCLK的周期下定时检测 SIM卡,因此 CCIN脚会定时出现一个跳变 ,可以用作检测 SIM存在与否的依据;CCVCC引脚是 MC35i模块为 SIM卡提供的供电电源,2.9v左右。
③、状态检测电路:
调试阶段,采用三极管驱动发光二极管,通过二极管明灭状态及时间来查表获得工作组态;成品设计中的下位机使用液晶显示,从液晶上直接显示各种工作状态,简化了硬件,只需加一个上拉电阻,采用双向口 PE3与之相连,通过软件读取引脚状态来判断 MC35I的工作组态。
2.3 CAN驱动与通信电路设计
CAN总线通信与驱动部分的硬件由:微控制器 AT90CAN128、CAN总线驱动器 PCA82C250以及高速光电耦 6N137构成,主要实现从 CAN总线上按照 J1939协议标准采集实时信息[9]。在数据的接收过程中,数据从 CAN总线上经过接口(一般是 DB9系列)进入 82C250收发器,再经过高速光电隔离芯片 6N137的隔离进入 CAN控制器。通过 6N137进行光电隔离以提高总线的抗干扰能力。
3.软件结构系统软件结构同样本着模块化和功能昀小实现的原则,主要包括监控中心软件、监控终端软件。监控中心软件主要由串口通信模块、管理模块、用户操作界面和后台数据库四部分组成。可以实现的功能有:短消息的提取与存储,数据的分析处理和显示,对异常数据的声光报警,数据库查询、统计及报表输出等。监控终端则主要包括:符合 J1939数据采集与处理、人机界面软件、与 GSM短信编码与发送。实现功能:实时采集、运行监控、液晶显示、发送及控制以及声光报警等。
4.总结随着
J1939与移动通信技术的发展,移动终端及 CAN总线采集设备的普及应用程度越来越高,而基于短消息的增值服务的前景越来越光明。基于短消息和 J1939的远程监控系统将有线传输的低廉与无线传输的便利有机结合了起来,有效降低了系统建成和运营成本;同时由于 J1939通信稳定可靠,也在一定程度上减少了系统出错的概率。因此,该系统在车载监控、工业数据采集系统等领域具有一定的实用价值。
但是,由于 SMS的费用及传输的缺点局限:容量限制(每条短信内容昀多 140个字节);网络繁忙时短信延迟长等,只适于传输小流量的数据。而建立在 GSM基础上的 GPRS恰恰具备了实时性强、快速性等等优点。故在实时性要求较高或数据量较大的应用场合,使用 GPRS代替短消息作为无线数据传输平台将更为合适。
-
单片机
+关注
关注
6034文章
44545浏览量
634369 -
无线
+关注
关注
31文章
5447浏览量
173222 -
总线
+关注
关注
10文章
2877浏览量
88042
发布评论请先 登录
相关推荐
基于GSM网络和AT90CAN128控制器实现单片机远程监控系统的设计
新人帖 求AT90CAN128熟人
at90can128用JTAG连不上,出现OCD JTAG错误,请教个位高手
AT90CAN128
AT90CAN128 CAN通讯接收问题
采用AT90CAN128的CAN系统解决方案
基于单片机的某车型CAN总线系统设计
基于单片机的某车型CAN总线系统设计

采用AT90CAN128的CAN系统解决方案






 工商网监
工商网监
评论