 利用80C196单片机设计SRD驱动系统
利用80C196单片机设计SRD驱动系统
引言
开关磁阻电动机是磁阻电动机与电子开关驱动控制器组成的控制装置,又称开关磁阻电机驱动系统(Switched Reluctance Motor drive,简称SRD)。电机结构简单坚固,运行可靠,系统具有启动转矩高、启动电流低、调速范围宽、运行效率高,特别适用于频繁启停及正反转运行,使得SRD成为交,直流电机驱动系统以及无刷直流电机驱动系统的强有力竞争者。目前,SRD已用于多个领域,如:电动车驱动、家用电器、伺服与调速系统等许多领域。
本文设计了一个以80C196单片机为控制核心的SRD的控制系统,充分利用了SRD电机控制方式灵活的特点,采用数字化控制系统对SR电机进行控制,简化了硬件电路,提高了系统的可靠性。
2 SR电机工作原理
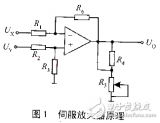
SR电机运行原理遵循磁阻最小原理——磁通总要沿着磁阻最小的路径闭合,因磁场扭曲而产生切向的磁拉力,当具有一定形状的铁心在移动到最小磁阻位置时,必使自己的主轴线与磁场的轴线重合。典型的SR电机结构原理如图1所示。
具体过程如下:当A相绕组电流控制开关S1,S2闭合时,A相励磁,所产生的磁场力使转子旋转到转子轴线与定子轴线重合的位置,从而产生磁阻性质的电磁转矩。顺序给A-B-C-D相绕组通电(B、C、D各相绕组在图中未画出),则转子便按逆时针方向连续转动起来。反之,依次给B-A-D-C相绕组通电,则转子会按顺时针方向转动。
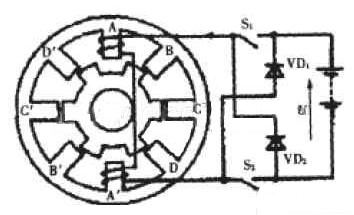
图1 SR电机结构原理图
由于是磁阻性质的电磁转矩,SR电机的转向与相绕组的电流方向无关,仅取决于相绕组的通电顺序,这使得能够简化功率变化器电路,当S1或S2闭合时,A相绕组从电源上吸收电能,而S1或S2断开时,绕组电流通过二极管VD1、VD2将剩余能量回馈给电源,因此SR电机具有能量回馈的特点,系统效率高。
2 SRD系统硬件设计
2.1系统基本组成
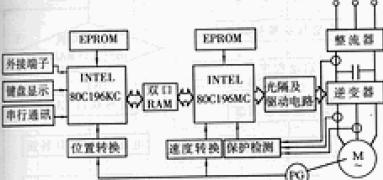
SRD系统主要由四部分组成:开关磁阻电机、功率变换器、控制器及传感器。它们之间的关系如图2所示。
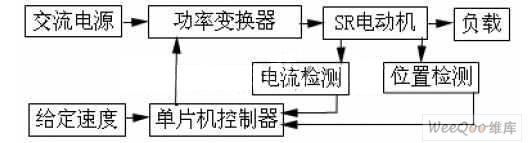
图2 SRD基本组成结构图
SR电动机是整个系统的执行部件,采用双凸极结构的磁阻的电机、功率变换器向SR电动机提供运转所需要的能量,位置检测器是转子位置及速度等信号的提供者,控制器是系统的中枢,它综合处理速度指令、速度反馈信号及电流传感器、位置传感器的反馈信号,从而控制功率变换器中主开关器件的工作状态,实现对SR电动机运行状态的最终控制。
2.2 功率变换电路
本文采用的是四相8/6极磁阻电动机作为系统控制的实验平台,功率电路采用H型的功率电路,如图3所示。A,B,C,D为SR电机的四相绕组,VD1~VD4为续流二极管,AB,CB,CD,AD两相同时导通,循环导通工作。若V1,V3同时导通,则A,B相通电。若V1关断,V2闭合,则A相关断,C相开始导通,此时,A相绕组将通过二极管VD1续流,C相绕组也将构成回路,使B相电流增大,中性点电位必然增高,促使A相续流迅速衰减,强行换相。紧接着关断V1,开通V4,则C,D相导通,依次循环导通,电机就连续工作起来。其*率开关用PWM控制信号通过驱动电路来进行控制其通断。
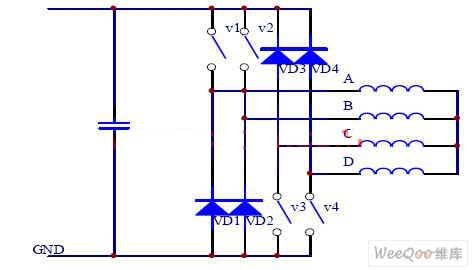
图3 功率电路原理图
2.3控制电路结构
控制电路部分主要包括80C196单片机,角度位置检测电路,显示键盘电路以及接口电路。在控制电路中,单片机是核心,负责执行指令、处理数据。角度位置检测电路通过光电传感器检测转子位置,并将位置信号处理好后送给功率变换器和显示电路部分显示系统信息。8279接口电路负责CPU和显示键盘部分的信息交换。系统处于工作状态时,用户通过键盘给定转速,单片机接收到转速指令后通过与实际测的速度相比较,通过内部设定的控制算法输出一个占空比可调的PWM信号,这个PWM信号使得在SR电机的相绕组两端电压的变化,从而实现调速的目的。
3 SRD系统软件设计
系统软件主要由单片机处理软件和PC上位机控制软件组成。
3.1 单片机软件设计
开关磁阻电机控制软件以控制系统硬件为依托。完成对位置信号,输入给定信号及当前运行状态的检测,进行判断和计算,输出合适的电流控制与换相控制信号。它由前台程序和后台程序组成,如图4所示。其中后台程序包括初始化程序,键盘扫描程序,调速控制程序,显示程序,闲时循环程序。前台程序由四个中断程序组成,它们位置中断程序、软件定时器中断,外部中断及串行口中断程序。
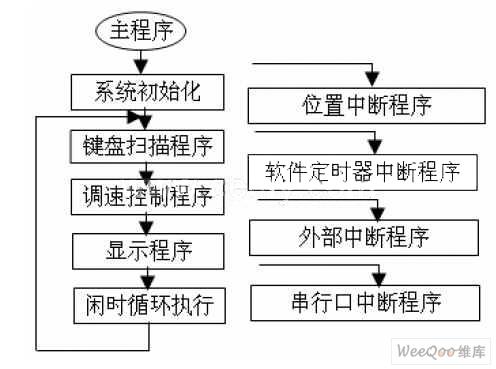
图4 开关磁阻电机控制程序流程
初始化程序完成有关单元初始化,选择外部接口的工作方式,CPU各部分功能部件初始化,开启中断等,使整个系统处于准备运行状态。键盘扫描程序检查键盘的输入情况,并进行相应的软件去抖动处理,当确实有键按下时进行相应的判断,如正转、反转、制动。调速控制程序根据给定速度,并根据电机的状态完成电机的启动与制动,当在运行时根据速度的偏差输出相应的PWM信号。显示程序主要完成电机在面板控制方式下的信息显示。电机启动前闪烁显示给定转速,启动后给定实际转速,运行过程中若出现故障,则显示故障性质代码。闲时循环程序由电源检测程序、硬件故障检测、故障处理及对上位机的命令分析程序组成。
位置中断程序即两个位置传感器输出的方波信号的上升沿和下降沿均引起中断,即电机每转过15°就产生依次中断。该程序主要完成运行速度检测、换相控制以及运行模式的切换。定时器中断实现主循环定时,电流采样,电流斩波等功能。而外部中断程序则实现外部键盘输入功能。串行口中断则是实现上位机与单片机之间的通信。
系统的工作过程如下:当单片机接到启动命令时,,在检测系统状态一切正常的情况下,根据位置传感器所提供的转子的位置信号,按启动逻辑给出相应的输出信号,该信号通过功率变换器向电机绕组供电,使电机开始转动。当转子转过一定角度时,控制电路根据位置传感器信号的变化通过功率变换器使电动机通电相位改变。运行时,根据给定速度与实际速度之间的误差输出占空比可以调节的PWM控制信号。当操作命令改变时,如反转,停车,制动时,控制电路再次改变工作逻辑,通过功率变换器使电动机实现操作要求。若在运行中出现故障情况,控制电路将通过关断功率变换器实现保护,并且通过显示电路显示故障代码。
2 PC机软件设计
系统上位机控制软件使用VB语言开发,它的作用是通过串口命令控制单片机工作,并显示实际运行转速。应用该软件,可以实现PC机对电机的正转、反转、停车、制动以及给定具体转动速度。软件的运行界面如图5所示。

图5 软件运行界面
4 小结
本系统采用80C196KC16位单片机为核心,配以8279等外围接口芯片构成检测、给定、显示、保护等外围电路,再加上驱动电路、主电路及磁阻电动机构成完整的SRD系统。对一台2KW的开关磁阻电机进行调速实验,实验结果表明开关磁阻电机的结构简单坚固、调速范围宽、调速性能优异、而且在整个调速范围内都具有很高的效率,系统可靠性高,达到了设计的要求。
-
单片机
+关注
关注
6035文章
44554浏览量
634682 -
控制器
+关注
关注
112文章
16334浏览量
177815 -
电机
+关注
关注
142文章
9001浏览量
145341
发布评论请先 登录
相关推荐
80C196单片机是不是坏了
80C196 单片机和CPLD在光电轴角编码器中的应用
基于80C196单片机的模糊控制系统
基于80C196KC单片机的F/V 转换器的设计
基于单片机的开关磁阻电机驱动系统设计
基于80C196单片机的角位移智能测量系统研究
基于PC机和80C196单片机的温度微机控制系统
基于80C196KC和80C196MC双单片机的通用伺服控制
基于80C196的频率测量及在电压采样中的应用
基于80C196的频率测量及在电压采样中的应用
TMS320C31和80C196双CPU构成的高速实时控制系
串行AD转换器TLC2543与80C196的接口及编程

80C196单片机
基于80C196单片机和CAN总线的全数字电动执行器的设计





 工商网监
工商网监
评论