 采用Atmega48单片机进行光强度数显器的设计
采用Atmega48单片机进行光强度数显器的设计
引言
现行的光控仪,如光强度测量仪等种类繁多,但存在性能不稳定,灵敏度低,制作繁琐,成本高等不少弊端,为了克服以上弊端,本文据此提出一设计方案。
1.系统设计
1.1 设计要求
本设计采用Atmega48v单片机控制,将光强度细分成许多个等级,并用数字信号显示出其亮度等级,必须满足的要求为:
1)提高可靠性和稳定性;
2)提高灵敏度高;
3)降低成本;
4)简化结构;
5)方便使用。
1.2 总体设计方案
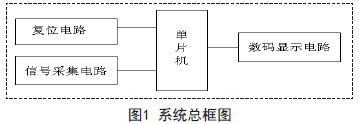
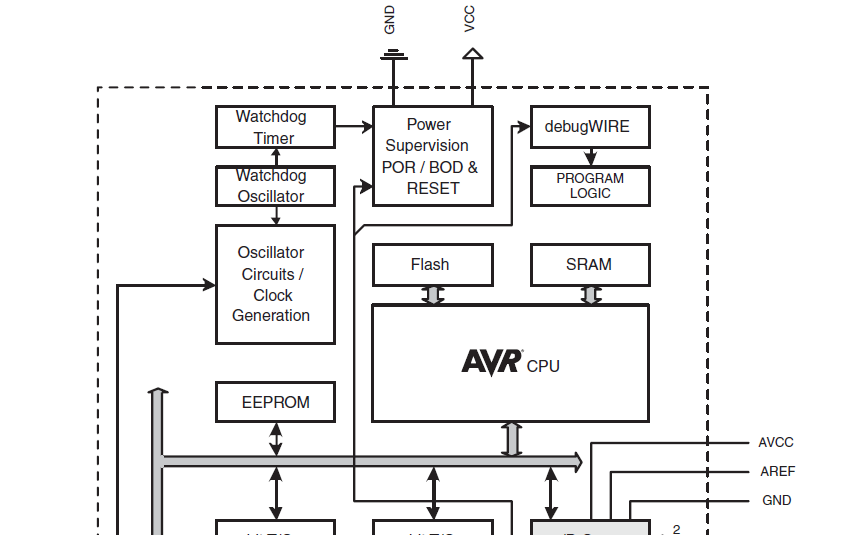
本设计可用于智能机器人的光感应系统,即作为机器人的视觉器官。开机后,单片机即按预先写入的程序运行,信号采集电路中光敏电阻根据接收的外部光线强弱可以改变其阻值大小,从而改变获得的电压大小,并将此电压传入单片机的输入端,单片机内部的模拟比较器及数模转换器将此模拟信号转换成数字信号,最后从单片机的输出端以数字量形式用数码管显示出来。从而达到了对光线的等级划分及等级显示,以此来控制机器人的寻迹动作。
如图1所示。
2.单元电路设计
2.1 信号采集电路设计
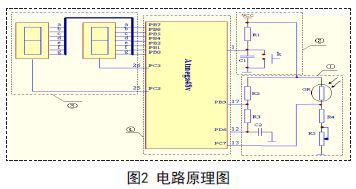
信号采集电路由光敏电阻、滑动电阻、电阻和电容等组成。其中的光敏电阻GR接收外部光线,根据接收到的外部信号的强弱来改变其光敏电阻的阻值大小,从而改变电路中电阻R4和滑动电阻R5上获得的电压,并将此电压传入单片机,从而完成信号的采集。其接线图如图2中①。
2.2 复位电路
单片机在启动时都需要复位,以使CPU系统各部分处于确定的初始状态,并从初始状态开始工作。ATMEGA48单片机的外部复位信号为低电平有效。当系统处于正常工作状态时,且振荡器稳定后,如果RST引脚上有一个低电平并维持2个机器周期(24个震荡周期)以上,则CPU就可以响应并将系统复位。本复位电路采用的是手动按钮复位,复位脚接上拉电阻,复位脚引出电容接地(电阻电容串接,节点处接reset)。在线下载采用标准接口,在线可编程(ISP),其连接方式如图2中②。
2.3 数码管显示电路
单片机应用系统中,数码管作为显示器件得到了广泛应用,用于阿拉伯数字和部分字母的显示。驱动多位数码管时,有动态显示和静态显示两种连接方式。本设计采用动态显示,利用单片机内部晶体振荡器,则硬件设计电路分解为ATmega48单片机和LED数码管两个部分,其结构简单,经济实惠。采用动态显示时,将所有数码管各名称相同的段位引脚并接在一起由一个I/O端控制;使用PB端口作为字型码输出,PC2、PC3分别于两个数码管公共端COM引脚相连,即PC2、PC3作为位扫描控制端口。为了简化电路,使用单片机接口线直接驱动数码管公共端,只是通过适当调大限流电阻阻值,以减小驱动电流。
其连接方式如图2中③。
2.4 控制系统
AVR系列的单片机不仅具有良好的集成性能。而且都具备在线编程接口,其中的ATmega系列还具备JTAG仿真和下载功能,含有片内看门狗电路、片内程序nash、同步串行接口SPI;多数AVR单片机还内嵌A/D转换器、EEPROM、模拟比较强、PWM定时计数器等多种功能。AVR单片机的I/O接口具有很强的驱动能力,电流可直接驱动继电器、LED等元件。从而省去驱动电路,节约系统成本。其中ATmega48是一款采用先进RISC精简指令,内置A/D的高速8位AVR单片机,可支持低电压联机flash和EEPROM写入功能,同时还支持Basic和C等高级语言编程,是当今AVR单片机市场上性价比很高的芯片。本设计中ATmega48是核心部件,连接信号采集电路和数码显示电路。采集到的信号输入到单片机经模拟比较、A/D转换等处理后通过数码管显示出来,其连接方式如图2中④。
2.5 软件设计
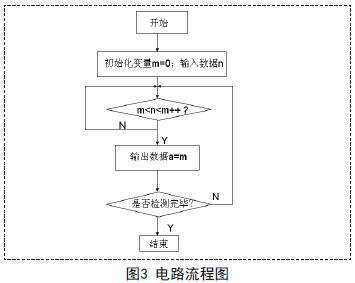
软件设计包括WINAVR+AVR Studio编辑程序及调试软件和PROTEUS仿真软件等部分。根据硬件电路,包括信号采集、逻辑运算、A/D转换、数字显示等,其流程图如图3:
3.结论
单片机体积小、重量轻、抗干扰能力强、环境要求不高、价格低廉、可靠性高、灵活性好、开发较为容易。尤其是AVR单片机可以用高级语言编程方便实现系统移植,并且加快了软件的开发过程。本文以ATMega48单片机为核心,辅以必要的电路,采用高级C语言编程设计了一个简易的动态扫描多位数码管显示电路,从而通过LED数码管能够显示多位数字码。
-
单片机
+关注
关注
6034文章
44554浏览量
634560 -
机器人
+关注
关注
211文章
28379浏览量
206904 -
数模转换器
+关注
关注
14文章
1011浏览量
83166
发布评论请先 登录
相关推荐
aTmega48怎么做电池电量检测
怎样去设计基于ATmega48单片机的交通灯系统
ATmega48中文资料,ATmega48中文数据手册
atmega48/atmega88/atmega168 pd
基于ATmega48单片机的可调交流电子负载的设计

基于ATmega48的3相无刷电机的控制方法
atmega48单片机特性 atmega48的低功耗设计

如何使用ATmega48单片机进行微功耗电刺激器的设计
用ATMEGA48制作低成本高精度数字温度计的程序免费下载
ATmega48和ATmega88及ATmega168微控制器的数据手册免费下载
基于ATmega48单片机的交通灯系统(一)






 工商网监
工商网监
评论