 日本本田研究所社交机器人Haru的设计了解(1)
日本本田研究所社交机器人Haru的设计了解(1)
开发一款不会让用户的最初期望过高而又能激发起用户的长期兴趣的社交机器人是一项富有挑战的工作。不仅对于商业化量产的社交机器人是如此,为用户长期互动研究而设计的社交机器人也面临同样的挑战。本田研究所很清楚这一点;其研究人员花了很长时间设计了一个社交机器人原型,它实现了“人们的期望、外观、功能可见性(physicalaffordance)和机器人功能之间的平衡”。这个社交机器人名为Haru。本田研究所的研究人员是如何设计出Haru的呢?他们对此作了很吸引人且详细的介绍。
在今年早些时候的ACM/IEEE人机交互国际会议(ACM/IEEE International Conference on Human Robot Interaction)上,发表了一篇关于Haru的论文。这篇论文的引言部分很好地阐述了仔细考虑旨在与人互动的社交机器人的物理设计为什么是如此重要的一件事:
“各种研究证实,机器人的物理属性对人们的预期有着塑造作用。因而,人们的期望取决于以机器人的外表及其与机器人实际的功能可见性(actualaffordances)的符合程度为自变量的一个函数。例如,如果一个6英尺高的具有未来感外观的人形机器人只执行问答任务而不会做任何其他事情,那么,它将会让人失望。但对于较小的、造型简单的智能设备来说,人们就不会因它们只能回答问题但不会做其他事情而感到失望,因为当前智能设备可完成Q&A任务的简单功能与它们的简单外形是相称的。在设计时机器人的物理要素和美学要素都需要深思熟虑,因为它们会影响其被接受和长期使用的可能性。必须事先预见到机器人的功能可见性方面的设计所带来的暗示性功能错觉,并在此与人们的期望之间寻求平衡。让人们的期望值保持在低水平,同时又能激起人们的兴趣,被证明可能是个好策略。”
这可能不仅是一个好策略,而且是最好的策略(或者说实际上是唯一的策略)。人们倾心于把各种各样的功能都赋予到机器人身上,即使它看起来只是模模糊糊地像人,这是社交机器人在过去的发展中面临的问题之一——用户认为它们足够人性化,比事实上的它们更有能力。商业化量产社交机器人的公司非常清楚人们的这种倾向,这就是为什么他们经常采用极简主义的方法,其思想就是如果它看起来不那么像人,那么人们对它的期望也会降低。然而,与此同时,目标是最大化用户的情感投入,鼓励用户投入到与机器人的长期互动中去。
本田研究所在Haru上采用的方法是通过“从设计的早期阶段就组建包括有来自机器人领域之外的专业人员的跨学科团队”,来全面处理机器人的设计问题。他们的“设计思路”强调从不一定以工程现实为基础的概念开始不断迭代。实际上,他们是从来自动画角色的灵感开始的:
最上面一排:艺术家们对皮克斯和迪斯尼的一些动画角色所做的素描。中间一排:艺术家们在头脑风暴中画出的不同桌面机器人候选者的代表性素描。最下面一行:审议阶段之后艺术家们画出的真实桌面机器人Haru的素描。
为了进一步改进Haru的移情行为(论文中称,“维持机器人行为中的生命幻觉出现重大失败时”,被识别为移情失败),研究人员请了50个人们过来,并请他们通过面部表情和肢体语言来表现各种不同的情绪状态。在这些志愿者摆各种姿势的时候,专业的艺术家们对他们进行了素描。之后在勾画Haru的概念性草图时,艺术家们采用了这些姿势。
上方(Top):表演者们表演的带感情的动作。下方(Bottom):艺术家们综合表演者们的表演动作而画出的机器人表情草图。
研究人员解释说,与此同时,Haru的物理设计需要在拥有表现人类情感的能力和远离可识别的形态之间进行折衷,以使人们的期望保持在合理范围。
“在设计Haru的外观时,我们的目标是通过试验各种外形要素和形状,使其在直观表象上远离人或动物的形态,从而让人们对它的期望在合理范围。Haru是一个实验性桌面机器人,它旨在作为一个研究平台,用于试验在特意设计的物理限制框架内各种交流形态的局限性和潜力。设计这些物理限制的目的是为了取得这两者之间的平衡:引起人们的兴趣的同时使人们的期望保持在合理范围,支持私人机器人与其用户之间的长期互动。”
目前的Haru原型可做五种动作:眼睛倾斜、眼睛转动、眼睛弹进弹出(眼睛可在框架内移入和移出15毫米)、身体向前和向后倾斜,以及基座旋转。这些动作都与其动画眼睛和基座中的LED阵列相结合,使得只是具有很模糊的人形形态的Haru能表达出很多种情感。
Haru的实际硬件及其“情绪可视性”(emotiveaffordance)。
全部设计时间的20%花在了确定Haru的确切大小上——建造了一系列的原型,然后将Haru的供候选尺寸缩减到了五种,它们的大小为最终尺寸的40%到160%不等。之后,团队成员投票选出了他们最喜欢的一个,Haru目前的尺寸为(底座直径22厘米,高约15厘米)获得了近一半的选票。
在最初的测试中,人们可以毫不费力地识别出Haru表达的简单情绪,比如快乐、悲伤和愤怒。Haru可以表达更复杂的情绪,但研究人员还没有对其有效性做过研究。看来还有很多其他的设计考虑也被用到了Haru上,不过这篇论文只关注Haru的视觉、物理元素。
Haru侧面和正面照。
-
机器人
+关注
关注
211文章
28390浏览量
206957
原文标题:来了解下本田研究所的最新社交机器人Haru的设计(上)
文章出处:【微信号:IEEE_China,微信公众号:IEEE电气电子工程师】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+初品的体验
【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
家电企业纷纷跨界机器人领域,人形机器人成为关注焦点
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
日本推出革命性的人形机器人
Al大模型机器人
广和通成功入选2024人形机器人供应链优质企业
日本宇宙航空研究开发“Int-Ball2”自由飞行相机机器人采用的Epson IMU
日本世嘉玩具公司召回"KIMIT Ragdoll"仿真猫机器人
银牛微电子入选2024人形机器人供应链优质企业

视觉机器人焊接的研究现状

人形机器人各派系的优势和局限
中国电科第一代人形机器人对外发布,预计明年投入应用
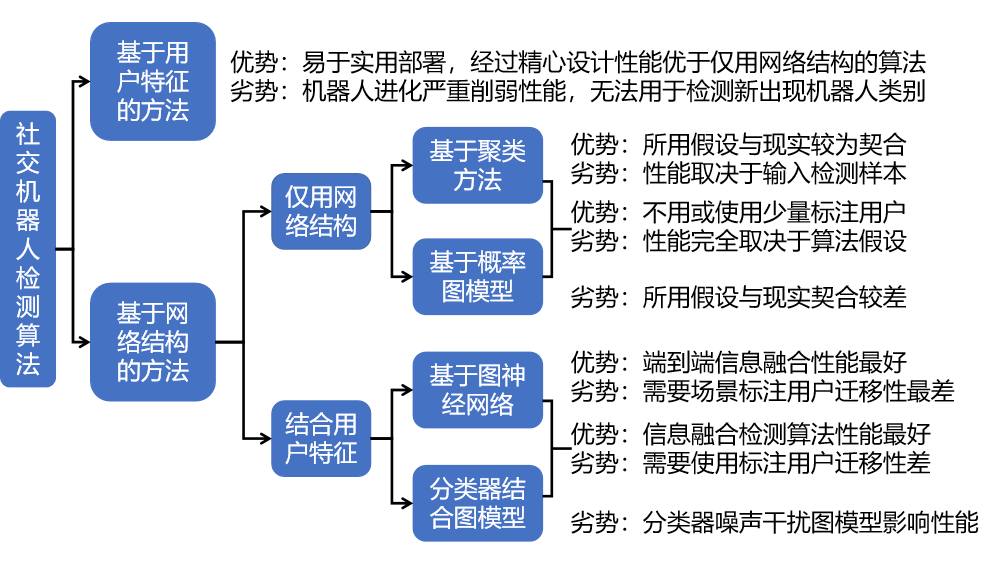
网络社交机器人检测的关键技术





 工商网监
工商网监
评论