 基于MATLAB的仿真实验平台设计与研究
基于MATLAB的仿真实验平台设计与研究

1 概述
简单系统可直接建立模型,并分析模块之间的相互关系以及模块输入输出关系。但对相对复杂的系统,Simulink包含多个模块,使得各个模块之间的相互关系非常复杂,不利于分析。为此,可将具有一定功能的模块群进行封装,用户不必了解其内部结构,只需了解其功能和输入参数即可。而且每个模块可移植。仿真实验平台封装的主要模块包括:典型的单相整流器主电路,三相全控桥整流器主电路,检测模块(坐标变换),脉冲产生模块,控制模块,测量模块等。通过仿真得到三相可逆PWM整流器的主电路电感值、开关频率等参数,并影响到输入电流总谐波失真(THD)、电源功率因数以及系统输出直流电压,从而为实际设计确定主电路的参数提供可靠依据,对三相可逆PWM整流器设计具有实际意义。
2 模块库的建立
仿真平台的建立是通过在Simulink Library Browser下面创建一个自己的模块库实现,新建库名为kongde。用右键打开模块库,并将自己封装的模块添加到库中。添加完所有模块并保存之后,点击Simulink Library Browser下面的kongcle,便显示了该模块库中的所有模块,如图1所示。仿真时,只需将各个功能模块从模块库中添加到模型文件中,设置相应的参数,并把各个功能模块按照原理连接即可观察结果。

3 模块封装
3.1 整流器主电路
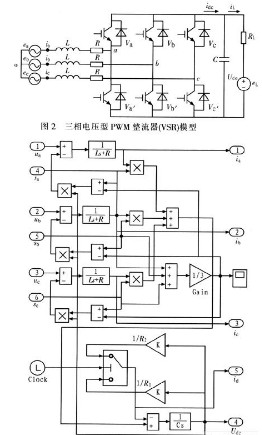
所建的整流器主电路采用阻感负载。三相电压型PWM整流器主电路如图2所示。对于Simulink依据整流器的数学模型,采用开关函数微分方程组搭建模型,仿真运算速度较快。由于模块库对诸如IGBT的缓冲电路参数,开关延时等参数有细致建模,故而更接近真实情况,如图3所示。
3.2 控制模块
仿真时所用的控制模块是基于空间电压矢量的电流解耦控制算法,电流解耦控制模块如图4所示。
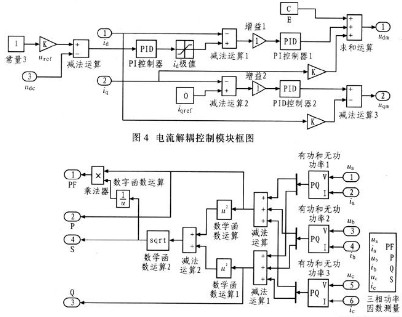
3.3 功率因数测量模块
因数测量包括功率因数、基波位移因数、畸变因数、以及有功功率、无功功率、视在功率等。对于三相系统,如果三相电压电流波形对称,则有功功率为三相有功之和,无功功率为三相无功之和,如图5所示。此模块可测量三相系统功率因数,以及有功、无功、视在功率等。
4 基于仿真模块的三相VSR系统的仿真
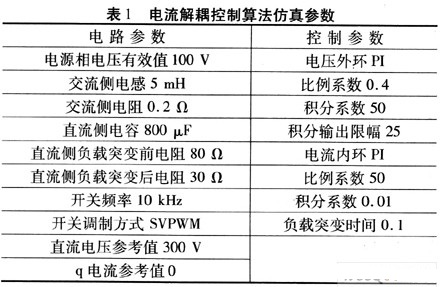
整个系统是由一个电压环和2个电流环组成的双内环单外环的双环控制结构,电压环不仅控制直流输出电压,并将电压环调节器的输出作为有功电流id的给定,无功电流iq的给定可以直接设为零。在电流电压双环系统中,作为内环的电流环直接决定着整个系统动静态特性的优劣。整个系统的仿真模型如图6所示,该系统包括主电路模块、检测模块、电流解耦控制模块、SVPWM模块以及测量模块。该模型中的主要模块均从kongde模块库中添加,按照功能连接好相应模块即可仿真。设置系统参数,具体参数如表l所示。
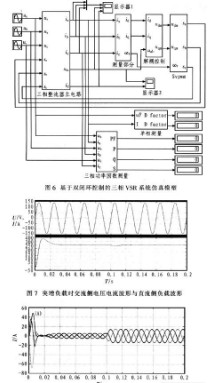
设置好参数后可对系统仿真。突增负载时交流侧电压、电流波形与直流侧负载波形如图7所示;突增负载时交流侧三相电流波形如图8所示;突减负载时交流侧电压电流波形与直流侧负载波形如图9所示;突减负载时交流侧三相电流波形如图10所示。
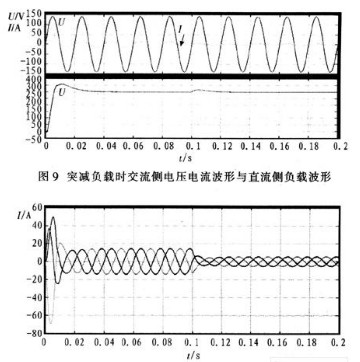
通过仿真结果可以看出:基于空间电压矢量的电流解耦控制算法,使三相VSR在稳态时交流侧电流波形对称且为正弦,相电流与相电压同相位,且直流侧电压稳定,负载突变时,电压有一定波动,但很快在一个周波内跟上给定值,可见系统具有较强的鲁棒性。通过测量可知,三相系统的功率因数近似为1,并测量其中一相的电压、电流,测得基波位移因数以及畸变因数均近似为l。在暂态过程中,电流具有快速的跟随性能,系统暂态过渡时间短。在负载突变发生时,都能保持正弦电流波形,并且保持高功率因数运行。三相VSR的基于空间电压矢量的电流解耦控制,直流侧电压更稳定,纹波更小,功率因数较高。同时三相VSR亦可运行在单位功率因数逆变状态。
5 结语
所建立的仿真平台可提供一个更深入学习基本理论的机会,而不是仅限于书本知识,在仿真过程中。必然会碰到各种问题,通过改变各种参数来分析波形,从而分析参数对整个仿真系统的影响。仿真平台有一定局限性,只对几种常见的整流器进行封装,同时有些参数固定,比如PWM周期(0.02 s),若要改变周期,同时也得改变电源周期,这些还有待改进。
-
matlab
+关注
关注
189文章
3032浏览量
239472 -
PWM
+关注
关注
116文章
5904浏览量
227062 -
仿真
+关注
关注
55文章
4564浏览量
138802
发布评论请先 登录
多种储能技术在MATLAB和Simulink中的建模与仿真

Aigtek高压放大器在电流体动力喷印实验研究中的应用

使用PYTHON进行的跨平台仿真
【书籍评测活动NO.66】玩转高速电路:基于ANSYS HFSS的无源仿真实例
翼辉信息飞行仿真平台DEEP UAV Simulator介绍
无刷直流电机双闭环控制的仿真研究
物联网仿真实训教学平台:以网关为核,重塑教育新范式
正式上线:MotoSim智能电机仿真平台

升降速曲线对直线电机系统性能影响的研究
扫描电机的PID恒速控制仿真及实验
三相开关磁阻电机直接转矩控制系统的研究
逆变器供电双三相异步电机系统的MATALB仿真
利用MATLAB对交流电机调速系统进行建模和仿真
矩阵变换器-异步电机矢量控制系统仿真研究
虚拟仿真实训室建设解决方案最新解析




评论