 多传感器融合的火灾探测系统的设计方案介绍
多传感器融合的火灾探测系统的设计方案介绍

具有火灾探测功能的传感器种类很多:烟雾传感器、温度传传感器、火焰感光传感器、气体传感器和复合型火灾探测器等。在选择火灾传感器时,应根据探测区域可能发生火灾的原因,火灾产生的特征来确定传感器的类型。比如:在加油站(或油库)可选择红外线传感器,它对烟头(或能引起油库起火的火星)较敏感。由于物体在燃烧时一般都伴有烟、光、温升、扩散辐射和异常气味等综合现象发生,利用多种传感器各自特点、使用范围、精度以提供局部现象和信息,再加以综合做出准确的判断,可以为决策者提供较准确的信息。
多传感器融合的火灾探测是充分利用不同时间与空间的多模态信息,采用人工智能技术,对按时序获得的多模态观测信息在一定准则下加以自动分析、优化综合和使用,获得对被测对象的一致性解释与描述,从而完成所需的决策和估计任务,得到更可靠、准确的结论,使系统获得比它的各组成部分更优越的性能。它必须对来自多传感器的数据进行多级别、多方面、多层次的处理,从而产生新的有意义的信息,而这种信息是任何单一传感器所无法获得的。
1 系统硬件设计
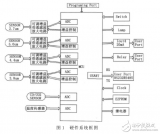
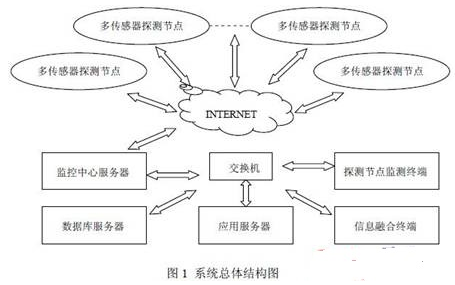
本方案硬件系统的核心控制器是采用三星的具有ARM920T核的16/32位多功能、低功耗的嵌入式处理器S3C2440.ARMSYS2440系列是基于三星S3C2440微处理器的ARM9高性能的开发平台,提供多款TFT液晶屏配套。主频400MHz,133MHz总线频率。采用最小系统核心板加扩展板的双层构架,可配置1GB闪存,128M内存。直接支持数字摄像头,800x600液晶屏,同时提供WINCE4.2/WINCE5.0,LINUX2.4/2.6操作系统。基于多传感器数据融合的火灾预警系统采用模块化结构,主要由传感器模块、A/D转换模块、S3C2440控制器、报警模块、执行模块和控制器必需的电源模块和存储器模块组成,图1为系统结构图。
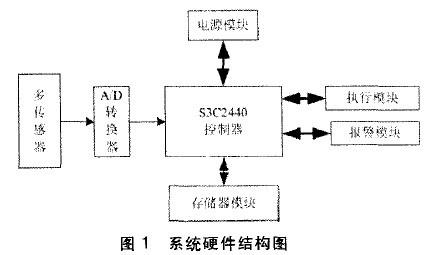
多传感器模块由多组传感器组成,每组传感器由温度传感器,可燃气体探测器和烟雾探测器组成,在该系统中温度传感器采用法国HuMIREL公司的HM500,它们具有成本低、体积小、寿命长、选择性和稳定性好等特性;可燃气体探测器选用了深圳市吉安达科技公司最新开发的红外气体传感器,探测器安装于被测气体容易泄露的室内、外危险场所,它们能够灵敏地感知空气中的低浓度污染气体,分别对空气中的异味、CO、H、O有较高的敏感度,本设计中采用的A/D转换模块是TI公司的12位高速并行转换器ADS805,具有采样速度高,稳定性好的特点。
S3C2440控制器的核采用一款16/32-bit RISC微处理器,采用6层板工艺,具有低功耗,高速的处理计算能力的特点,简单稳定的设计非常适合对电源要求较高的产品上。采用了新的总线构架(AMBA),其内核为32bit的先进处理器。其主频最高可达到533MHz,在处理大量传感器数据情况下,完全可以保证实时性的要求。其电源管理模块能够提供系统多种电压供电,包括芯片内核电压采用1.8V供电,芯片的I/O部分采用3.3V供电。而片外的一些常规集成电路又采用5V供电。智能电源管理模块很好地解决了对系统各个部分供电要求的不同,降低了功耗,减少了不同电源之间的干扰噪声,提高了系统的集成度。它的存储器模块包括两片SDRAM共64MB和一片64MNandflash(K9F1208)并且可根据存储容量要求选配其他容量Nandflash存储器,存储器模块用来存储系统运行程序和传感器采集的火灾监控过程的数据。
报警模块主要当判断有火险发生时,启动声光报警信号来通知值班人员,从而采取相应的措施;执行模块完成火险发生时启动附近的灭火装置,使火灾的危害降低到最小的程度。
2 系统软件设计
多传感器信息融合的消防报警系统与单传感器数据相比有很多优点。除了将同源数据进行组合而得到统计上的优势之外,使用多种传感器可以提高精度。多传感器数据融合还有许多优点,包括:可以提高报警信息的可信度。
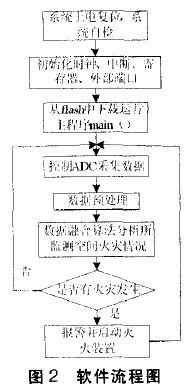
该系统的软件部分主要包括系统的上电初始化、系统自检、初始化时钟、中断设置、外设初始化,然后运行主程序main()函数,建立任务后,扩展口对ADC进行控制切换通道采集数据。对数据进行平滑滤波、标定补偿等预处理后,来通过数据融合算法分析火灾发生情况,判断是否报警并循环检测。系统软件流程如图2所示。
与一般的数据采集处理系统不同。本系统的数据采集软件和数据处理软件均在处理器上运行,系统软件除了要不断采集最新的火灾现场数据外,还要进行实时地数据处理。以8/16位单片机为核心的测控系统。程序一般采用前后台方式编写。后台运行一个大的无限循环。前台为多个中断。这种方式在程序规模增大、系统功能较复杂,尤其是系统中的并发模块较多的情况下,主显得力不从心,很难保证测量、控制的实时性。而且编程困难、不便于增加功能。综合考虑软件复杂度、运算量、实时性要求,系统采用μCOS-II操作系统。
本系统中大部分任务通过调用OSTimeDly()实现定时运行,每个任务都可通过系统函数赋予不同的定时时间间隔。ADC数据采集程序,数据处理程序和数据融合算法程序主要由嵌入式C语言来编写。
3 数据融合算法
在实际的消防报警系统中,由于各单传感器的类型不同、特点不同以及各单传感器所获得的观测维不同等原因,相应的预测模型也就不同,但与此同时多个传感器的状态向量中又往往具有公共的向量元素,即公共维。目前,常用的信息融合方法大致分为以下几类:一是基于估计和统计的经典方法,包括加权平均法、最小二乘法和D-S证据理论等;二是信息论的融合,包括模板法、聚类分析的熵理论等;三是人工智能的融合方法,包括模糊逻辑、产生式规则、神经网络、遗传算法和模糊积分理论以及专家系统等。
在应用于多传感器信息融合时,我们将A看作系统可能决策的集合,B看作传感器的集合,A和B的关系矩阵R A+B中的元素μi表示由传感器i推断决策为i的可能性,X表示各传感器判断的可信度,经过模糊变换得到的Y就是各决策的可能性。
具体的,我们假设有m个传感器对系统进行观测,而系统的决策可能有n个,则:
A:{y1/决策、y2/决策、…、yn/决策n}
B:{x1/传感器、x2/传感器、…、xn/传感器m}
传感器对各个决策的判断用定义在A上的隶属函数表示,设传感器i对系统的判断结果是:
μi1/决策,μi2/决策,…,μin/决策n,0≤μy≤1
即认为结果为决策j的可能性为μij,记作向量μi1,μi2,μi3,…μin,则m个传感器构成A×B的关系矩阵为:
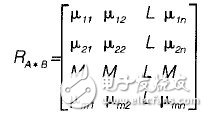
将各传感器判断的可信度用B上的隶属度:X={x1/传感器1×x2/传感器2…、xn/传感器n}表示,那么,根据Y=X*R A*B进行模糊变换,就可得出:y=(y1,y2,y3,…,yn)
即综合判断后的各决策的可能性为y,最后,对各可能判决按照一定的准则(比如最大隶属度方法、中心法等)进行选择,得出最优结果。根据运算的y值,采用以下规则进行判决应注意:①判决结果应有最大的隶属度。②判决结果的隶属度与必须大于某一阀值(一般情况取0.5)。③判决结果的隶属度与其它判决的隶属度值的差必须大于某一阀值(比如0.1)。
4 火灾监测的数据融合试验
本设计对火灾监测使用了温度传感器,可燃气体探测器的烟雾探测器,数据融合的方法如图3.
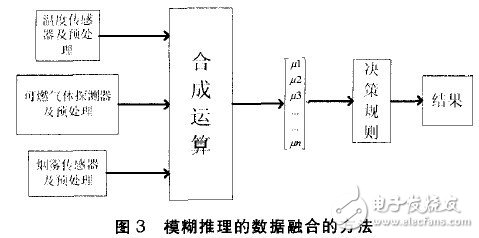
图3基于模糊推理的数据融合的一般方法是在火灾故障监测系统中,首先确定各个传感器的权重,在设计中我们设定温度传感器,可燃气体探测器的权重分别为W1=0.5,W2=0.3,W3=0.2;将最后的判决结果分为两种:有火灾Y1和无火灾Y2;根据当前的工作状态,确定每个传感器X对于每一判决Y的隶属函数;再进行线性变换运算,即可确定最后的结果。
从不精确的前提集合中得出可能的不精确结论的推理过程,又称近似推理。在人的思维中,推理过程常常是近似的。例如,人们根据条件语句(假言)"若西红柿是红的",则西红柿是熟的"和前提(直言)"西红柿非常红",立即可得出结论"西红柿非常熟".这种不精确的推理不可能用经典的二值逻辑或多值逻辑来完成。L.A.扎德于1975年首先提出模糊推理的合成规则和把条件语句"若x为A,则y为B"转换为模糊关系的规则。此后J.F.鲍德温和R.R.耶格尔等人又各自采用带有模糊真值的模糊逻辑而提出了不同于扎德的方法。
比如,在某时刻,根据温度传感器的数据确定有无火灾的隶属度分别为μ11=0.45,μ12=0.55,根据烟雾传感器的数据确定有无火灾的隶属度分别为μ31=0.9,μ32=0.1,采用线性变换运算得Y,
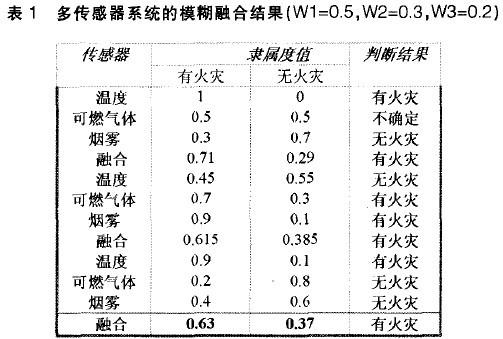
根据结果得有火灾隐患,应该启动气溶灭火器。表1是模糊融合在火灾故障监测系统中的试验数据。
5 结束语
将模糊推理数据融合方法应用到多传感器的电缆火灾故障监测系统,与单一的传感器相比,具有更高的准确性的可信度。运行结果表明,这种方法对提高火灾故障检测的可靠性是实用和有效的,可降低火灾报警的误报率。但是,这种方法也有一些缺点,比如传感器的权重和每一传感器对判决的隶属度值的分配方面,没有形成统一的理论,需要依靠经验进行设置。
-
传感器
+关注
关注
2577文章
55502浏览量
793922 -
控制器
+关注
关注
114文章
17877浏览量
195113 -
人工智能
+关注
关注
1820文章
50324浏览量
266929
发布评论请先 登录




评论