 雷达航迹融合验证系统的工作原理与设计
雷达航迹融合验证系统的工作原理与设计
引言
在防空指挥自动化信息处理过程中,由多雷达站点所提供目标信息源,在信息融合中,其航迹融合是关键的一个环节。航迹关联的正确与否,直接关系到其他融合(如数据融合、特征融合、决策融合等)的正确性。在航迹关联过程中,需要考虑各种各样情况,如目标属性、目标特征、威胁度、批号,各雷达站点的情况等,根据相应条件设计关联与融合算法。如何根据实际任务背景设计仿真各种情况,来有效地验证目标航迹关联与融合算法的正确性是有效解决算法验证的关键所在。
随着科学技术的不断发展,多传感器信息融合已经迅速发展起来,并在现代C4ISR(指挥、控制、通信、计算机、情报、监视、侦查)系统中和各种武器平台上以及许多民事领域得到了广泛的应用。所谓多传感器信息融合就是利用计算机技术对按时序获得的若干传感器的观测信息在一定准则下加以自动分析、优化综合以完成所需的决策和估计任务而进行的信息处理过程。信息融合的目标是基于各传感器分离观测信息,通过对信息的优化组合导出更多的有效信息。这是最佳协同作用的结果,它的最终目的是利用多个传感器共同或联合操作的优势,来提高整个传感器系统的有效性。 航迹融合是多传感器信息融合技术在军事上的一个重要应用。所谓航迹融合,就是对多个传感器所扫描到的各目标的状态信息(位置信息)进行融合。在目标密集的军事作战系统中,与单传感器相比,通过多个传感器对目标进行跟踪,再将各传感器的目标航迹经过融合而得到的目标位置信息更有可靠性,对整个军事作战系统也更有利用价值。
1 验证系统构架与工作原理
航迹融合验证系统构架主要由航迹融合中心(FCSC)、站点(RSC)、网络等组成,如图1所示。整个系统通过自构建方式将FCSC与每个RSC构成一完整信息交换系统。图中每个站点为仿真一部雷达的信息输出装置,且每个站点可提供多批不同地理位置、不同扫描时间的目标信息。站点的规模可根据实际情况来设置。航迹融合中心将来自各站点目标信息进行关联与融合,并给出最终的综合目标航迹。图中待验证的“航迹关联与融合模块”(TAFM)通过程序“接口模块”嵌入到FCSC里。

在程序启动后,融合中心计算机(FCSC)首先向网络广播确认信息与本身的系统时间信息。同时给出仿真开始命令,各RSC开始仿真计算,并通过集线器、TCP/IP协议网络将目标批号、坐标值、属性、时间等数据送至融合中心。
图1中,接口模块是将按照要求所设计的航迹融合模块中数据格式转换到融合中心验证系统所能接受的数据格式。
2 验证系统软件设计
2.1 站点坐标系
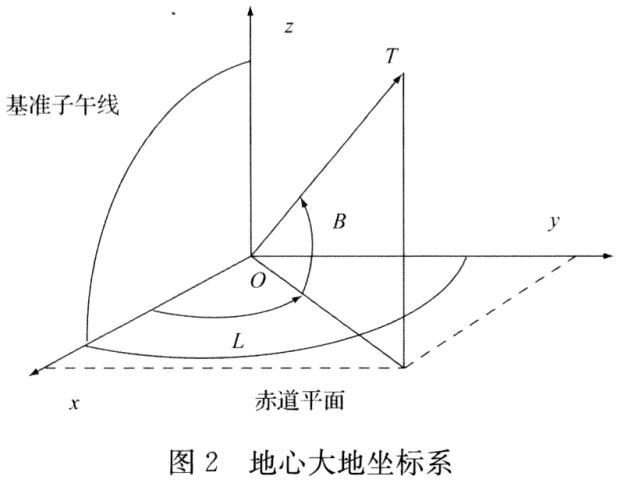
在该验证系统中,站点坐标系采用地心直角坐标系,如图2所示。图中T为站点,O为地心,B、L分别为纬度与经度。采用该坐标系是为各站点之间进行空间校正之用。所有站点的目标坐标值数据均通过地心大地坐标系进行转换。每个站点的大地坐标值为:(Bi,Li,Hi)i=O,1,2,…,n。当i=O时,为基准站点大地坐标。
站点测量坐标系如图3所示,O点为站点测量中心,O-XYZ为东北天坐标系,OX-指向大地东方,OY-指向大地北方。
现假定雷达基准方向与Y同向。当然雷达基准可以任意,最后将测得的目标方位角度转换到O-XYZ坐标上即可。测量站点的球坐标→直角坐标的转换为:
2.2 站点目标模型产生与输出定时
2.2.1 目标模型产生
在空中目标模型采用直角坐标进行建立:
式中: 为第j个目标的初始值。
对同一目标,不同站点所处地理位置不同,因而所得到的目标坐标值也不同。为仿真不同地理位置下的目标航迹,需将式(2)的目标转换到每个站点下的直角坐标:
式中:地球的卯酉圈半径N与椭球第一偏心率е。(xGj,yGj,zGj)为目标的大地直角坐标值。因此,第i站点第j个目标在各自站点测量直角坐标系下的目标坐标值为:
式中:(为的转置;(Xi,Yi,Zi)为各站点的大地直角坐标值,由式(4)得到。
同时针对每个目标还有批号Nij、目标属性Sij(我机、友机、敌机)。不同站点即使针对同一目标,其批号也未必相同,但属性是唯一的。
2.2.2 目标输出定时
每个站点计算机在启动时受融合中心的定时器控制。但不考虑网络的时延。站点输出目标坐标值时,同时取该站点的系统时间,与坐标值一起打包送至融合中心。每个站点的数据率根据实际雷达或情报网的情况可设置为:1次/秒、1次/2秒或1次/3秒。
2.3 融合中心模型
2.3.1 空间校准模块
各站点目标值转换到大地直角坐标(xGij,yGij,zGij)后,再将其转换到融合中心(X0,y0,Z0)所在的大地直角坐标系(xGij,yGij,zGij)里。最后由式(5)将其转换到融合中心的测量坐标系(xij,yij,zij)里。这就完成了各站点目标的坐标转换:
上述转换模式比较精确,考虑到了地球的曲率。如果各站点之间距离不大,也可直接进行站点间坐标的直接转换。但由于上级情报指挥系统可能距雷达站点较远,因此,需要考虑大地曲面问题。
2.3.2 时间校准模块
由于每个站点各自定时,没有一个统一的定时关系,且数据传输也需要时间。所以在进行多站点、多目标航迹关联时,除进行空间校正外,还要进行时间校正,使得各站点的输出数据统一到一个基准时间上,如采用B码授时装置。这就要求每个站点的输出数据必须带有绝对时间戳,以便于明确该输出数据的获取时刻。由于一般搜索雷达的最小扫描周期为T=1 s,所以,以1 s为航迹关联周期。各站点数据通过外推归到统一时刻上tk上,如图4所示。取两个标准授时之间为1 s,且tk-tk-1=T,tij(i=1,2,…,n;j=l,2,…,m)分别为第i站点第j个数据输出时刻。所以外推时间△tij为:
然后进行坐标外推:
因此,所有航迹关联均在(xPij,yPij,zPij)基础上完成。
对于周期为2 s的站点数据,还需要进行数据加密处理,使之成为1次/秒的数据率,以便于和T=l s站点的点迹进行关联,即两秒之间的时刻坐标插值为:
式中:T=1 s。
2.3.3 综合航迹显示模块
目标空中态势综合航迹通过综合航迹显示模块仿真完成,如图5所示。由待验证的航迹关联融合将融合后的目标综合航迹参数送至综合航迹显示模块,以显示空中目标的态势,验证航迹关联融合的正确性。图中给出了6条综合航迹的显示,并给每条航迹赋予了批号。图5中,中心为融合中心,每个环代表一定的距离,在最外环有角度的分划线。正北为基准角度。
当目标超出最大距离环时,即目标已飞出探测器的威力范围,不在显示其航迹。
3 系统仿真与分析
分布式仿真是工程领域内一种应用较为广泛的仿真技术,是采用协调一致的结构、标准、协议和数据库,通过局域网、广域网将分布在各地的仿真设备互联并交互作用的一种综合环境。本文将想定系统应用于分布式仿真系统中,可以验证各武器系统的战术技术指标,评估各武器系统和整个大系统的作战效能以及各武器系统在整个仿真体系中的地位和作用,既有利于提高仿真系统的可重用性、互操作性,也增强了仿真的可靠性与置信度。
系统仿真伊始,FCSC与各RSC通过系统自构建模式自动建立信息关系,同时各RSC的地理信息(Bi,Li,Hi,i=0,l,2,…,n)也将送至FCSC。
由各RSC里目标航迹模块所产生的目标信息通过TCP/IP以太网向FCSC传送,根据输入的各站点的目标,经由时空校正后,由待验证航迹关联融合模块处理,然后送至综合显示模块。
在仿真过程中,选择了3个站点,6批目标进行了仿真验证实验,如表l所示。站点RSCl可输出6批目标,RSC2与RSC3可分别输出6批目标中的3批。6批目标在X-Y平面上的运动关系如图6所示。其中1~4批号目标平行飞行。
待验证航迹融合模块就是将3个站点输出的目标航迹进行综合处理,即航迹归类,得到综合航迹,如图5所示,可一目了然航迹融合的正确与否。
4 结束语
该分布式雷达站点航迹融合验证系统,可用于航迹关联算法验证、航迹融合仿真等。具有简单适用、效果直观等特点。
将来可扩展到雷达的二次信息处理过程仿真与验证、防空反导武器系统指挥与控制仿真等方面。
-
传感器
+关注
关注
2550文章
51046浏览量
753160 -
计算机
+关注
关注
19文章
7489浏览量
87877 -
广播
+关注
关注
1文章
305浏览量
23048
发布评论请先 登录
相关推荐
典型雷达航迹的仿真与实现
多传感器异步航迹融合算法与仿真
基于可信度的航迹融合
嵌入式系统运用于典型雷达航迹模型及实现仿真模拟

基于模糊聚类的多雷达航迹关联算法
多平台数据融合系统的航迹关联研究分析







 工商网监
工商网监
评论