 采用高时钟频率的FPGA实现高速运动物体测速系统的设计
采用高时钟频率的FPGA实现高速运动物体测速系统的设计
高速运动物体的物理状态检测分析一直以来都是一项重要的研究内容,特别是对于高速运动物体瞬时运动速度的检测。这是瞬态过程及效应物理研究中的一个有待发展的领域,可能会导致极端条件下的新物理效应,在高速碰撞等方面有着直接的应用背景,也给检测和控制技术提出了更高的挑战。
1 测量方法
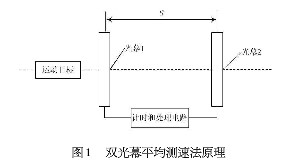
对于高速运动的物体,常用的速度测量方法按测量原理可分成三类,即瞬时速度测量法、平均速度测量法和多普勒原理测量法。瞬时速度测量法采用弹道摆或微波倾角法,可以换算出物体的瞬时飞行速度,但测试误差较大,目前很难达到高的精度。多普勒测速法是利用波传播中多普勒效应进行测速的方法,也是一种比较有效的测量速度方法。平均速度测量法是在测量目标前进方向放置两道光幕;通过测量两光幕之间的距离S和测量目标通过两光幕之间的时间t;然后利用平均速度公式v=S/t计算测量目标的速度,如图1所示。
但在使用双光幕的平均速度测量法中,由于每个光幕及其后处理电路在工作中的处理速度和延时不可能完全一致,这样就会造成难以避免的误差。在要求高精度的测量中,这些误差会对结果产生附加的负面的影响。另外,两个光幕射出的光要求严格平行,否则测量结果也会产生误差,而严格平行在现实测量中也很难做到。基于此,这里提出一种单光幕的速度测量系统。在避免两路信号通过光幕及其后的电路时由于处理时间不一致而在产生误差的同时,也避免了因两束光线不平行产生的误差。
2 测量系统原理
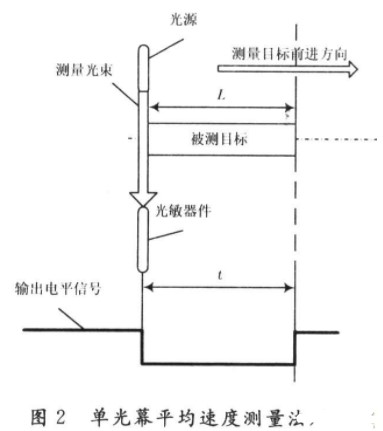
该系统采用单光头测量,系统总体结构如图2所示。将光源置于发射器出口处的上方,并在其下方固定光敏器件,使光敏器件可以准确接收到光源所发出的光束。测量开始后,当目标前端挡住光源发出的光时,光敏器件因接收不到光而输出低电压信号;当目标通过后,光敏器件重新接收到光源所发出的光后,输出变回高电压信号。被测目标的长度L可以事先通过矩阵键盘输入到测速度系统,根据电信号的变化触发和停止计数单元,可以记录到目标通过光源下方的时间t,在假设目标运动方向与光束垂直时,可近似取L计算目标在这段时间内的平均速度v=L/t。此时,目标不受运动方向上力的作用,所以速度变化微小,此速度可看作目标的出口速度。
从以上过程可以看出,在保证整套系统具有高精度的同时,对光电转换器件性能的依赖大大降低。同时因为两路信号均经过同一套处理电路,所以信号在路径上的延时几乎完全一致,提高了测量精度。因此,此方法具有测试精度高,灵敏度调节灵活,成本低等特点。
3 系统模型
为了在数据处理和运算时仍能达到更高的精度和更快的处理速度,考虑采用时钟频率较高的FPGA芯片实现此系统。这样做的好处是可以采用先进的Top-Down设计方法,从系统原型人手,在顶层进行功能方框图的划分和结构设计。在功能级进行仿真、纠错,并用硬件描述语言对高层次的系统行为进行描述,然后用综合工具将设计转化为具体门电路网表后,将整个系统下载到FPGA芯片中执行。由于设计的主要仿真和调试过程是在高层次上完成的,这不仅有利于早期发现结构设计上的错误,避免设计工作的浪费,而且也减少了逻辑功能仿真的工作量,提高了设计的一次成功率。所以FPGA芯片在理论上更加适合作为此方案的硬件载体。此系统在FPGA中的数据处理流程如图3所示。

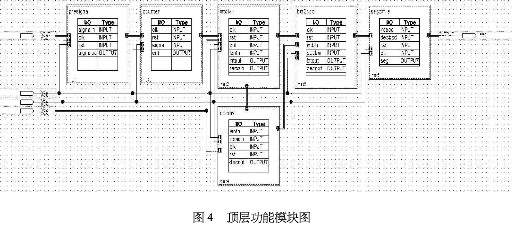
根据上述的数据处理过程可以建立系统的顶层功能模块框图如图4所示。主流FPGA的规模和内部结构完全可以满足框图要求,可见在FPGA中实现此速度测量系统完全具有可行性。
4 测量精度分析
采用单光源测量运动目标速度的测量原理虽然简单,但想要满足所有的理想测量条件却非常困难,如果要进行详细的精度分析则更为复杂。在图1所示的原理中,理想测量的前提条件是:
(1)配套外围器件工作速度足够稳定;
(2)目标运动方向与光束严格垂直;
(3)光源发出的光束无限细;
(4)计数器不存在计数误差;
(5)被测目标的长度测量准确。
但在实际情况中,上述条件都无法完全满足,正是这些微小的改变造成了最终测量结果与实际速度的误差。所以精度的分析需要从这几个方面的误差源头入手。可以将上述的(1)、(3)、(4)归为时间上的误差,而将(2)、(5)归为长度上的误差。
4.1 配套外围器件的影响
一般高速光电器件产生信号的延迟时间为3~5μs,但由于采用单束光获取信号,使得在一次测量过程中的开始和结束两次信号传输都经过相同的路径,外围器件的延时可以绝大部分抵消;但还是会存在由于器件精度引起的两次延时的微量不同,取1/10最大延迟时间得出△t1=O.5μs。
4.2 目标运动方向偏差的影响
在目标运动速度与光束的方向垂直时,可近似取目标长度L,计算运动目标速度,但当目标并没有严格垂直于光束而有θ的偏转时,L是与目标运动方向相关的量,L‘=LCOSθ。假设目标在出口处最大偏差角为1°,则可计算出长度误差△L1=L-L’=L(1-COSθ)=1.523×10-4L,若取长度L=O.1 m计算,则△L1=1.523×10-5m。
4.3 光点直径的影响
由于光束不是无限细,所以无法确定目标挡住多少光束时光敏器件会产生信号,假设光束直径(d)为1 mm,目标速度(v)为1 000 m/s时,最大时间误差△t2=d/v=1μs。
4.4 计数误差的影响
该设计中采用40 MHz的晶振,定时步长为25 ns,由于无法确定计数开始时的时钟状态,所以在计数的开始和结束时均可能产生最大一个时钟周期的计数误差,最大误差为△t3=25×2=50 ns。
4.5 目标测量精度的影响
被测目标的长度L在测量过程中,由于测量工具的限制,得到的被测目标长度值也不可避免地会存在误差,假设用高精度的游标卡尺测量,测量精度可以达到0.01 mm,△L2=0.01 mm。通过分析,目标运动距离测量总误差为:
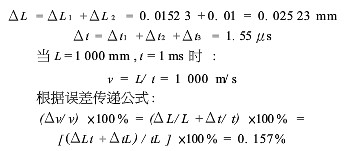
通过以上计算,系统的总体误差为0.157%,达到较高的精度。
5 结 语
本文在充分调查了当前针对高速运动目标的速度测量方法的基础上,提出利用单光幕平均速度测量法测量高速运动目标的速度。避免了使用双光幕平均速度测量法时由于两路信号时延不同和两光幕不平行而产生的误差;同时减少一个光幕的使用,降低了系统成本。采用高时钟频率的FPGA作为主要实现芯片,在进一步减小系统误差的同时保证了系统的工作速度和稳定性,是一套较为理想的速度测量方案。
-
FPGA
+关注
关注
1638文章
21877浏览量
610542 -
芯片
+关注
关注
459文章
51812浏览量
431903 -
计数器
+关注
关注
32文章
2278浏览量
95720
发布评论请先 登录
相关推荐
超声波测距 实现活动物体与非活动物体的判别
通过传感器来捕捉运动物体信号,并驱动电机,追踪移动...
请教一个关于运动物体轮廓检测系统的问题
【创龙C66x开发板申请】运动物体捕获系统
怎么采用Verilog FPGA设计悬挂运动控制系统的控制器
基于运动估计的运动物体检测技术研究
基于运动矢量的运动物体提取方法

跟踪运动物体轨迹算法的研究

基于ARM11的视频图像中运动物体检测跟踪系统

基于激光位移传感器的运动物体探测系统

如何快速地创建图像处理流水线,实时检测运动物体
实现含有运动物体的图像拼接方法论文免费下载
使用OpenCV的视频对象实现运动物体检测追踪的资料说明

浅析FPGA的图像采集和快速移动物体检测





 工商网监
工商网监
评论