 利用Cortex-M3控制模块实现自动循迹的矿井车系统设计
利用Cortex-M3控制模块实现自动循迹的矿井车系统设计
随着科技的发展、和谐社会的需求,在恶劣矿井下自动小车取代人力运作、保证矿工的人身安全成为了急需解决的问题。智能循迹小车为改善和提高矿井下运输货物,发挥了重要的作用。其中,系统硬件设计及其运行稳定性是智能循迹小车系统的基本要素,而自动循迹的控制是其重要的方面。在矿井环境下,小车运行控制系统具有较强的非线性、模糊性和不确定性,一般路面的运载小车无法完成相应工作,用传统的控制理论和方法很难对其进行有效的控制。
可见矿井恶劣环境下,智能小车自动循迹系统性能的设计变得非常重要。为了实现系统的稳定性,在做了具体环境分析和需求情况下,提出了一种智能小车系统的设计方案,该方案采用最新的ARM内核作控制端,红外探测器和图像传感器等作为信息采集、传输与通讯,软件上采用模糊控制策略实现。系统能完成在恶劣矿井环境下的自动循迹。
1 系统硬件设计
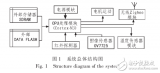
根据系统设计的需求,结合CPU的选型以及软件控制算法的特点,对自动循迹小车硬件系统进行了整体的规划设计。系统由CPU处理模块、红外探测器、图像传感器、温度传感器、电机驱动、无线传输模块以及存储器模块等组成。各模块之间的联系如图1所示。

图1 系统总体结构图
1)CPU处理模块采用ARM最新内核Cortex-M3,与其它处理器相比,优势在于低功耗、低成本、高性能3者(或2者)的结合。在系统中其主要功能:实时采集各种传感器的信息,根据系统模糊控制方法,作出系统的判断、决策、相应数据的存储或处理。
2)红外探测器模块是安装在小车周围的多组红外收发模块,通过即时的收发红外信息,判断路况。主要负责对小车路径实时探测,并及时将信息反馈CPU进行处理。
3)图像传感器模块采用高速采集、高分辨率、彩色图像OV7725传感器,按照CPU预先设定的采集参数,负责特殊场景的图像采集,并保存在系统存储器或上传远程终端。
4)无线Zigbee模块是基于2.4 G的无线通信组网Zigbee技术,功能是将循迹小车系统的信息上传远程终端,或接收远程终端的控制命令,完成系统的无线通信与整体组网。
5)存储器模块包括外部SDRAM和外扩DKTA FLASH,前者用于系统CPU运算数据的临时存储,后者用于保存采集的重要图像数据,以备远程终端调用。
2 系统软件设计
系统主控芯片为ARM公司的Cortex-M3控制器,负责整体系统的数据采集、运算控制、驱动调配与通信。软件设计开发是基于集成开发环境Keil Uvision4完成,系统软件设计的整体流程如图2所示。
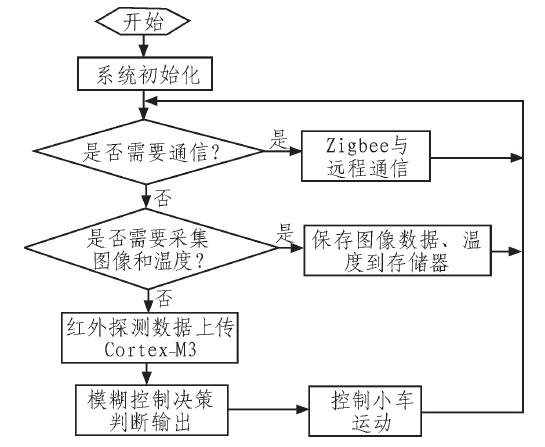
图2 软件设计流程图
系统上电后初始化各寄存器,设置图像传感器OV7725采集参数,Zigbee模块通信参数以及配置红外传感器的探测参数。进入工作状态后,先通过无线Zigbee模块检查是否需要与远程终端通信;判断是否需要采集当前环境的图像或温度数据;通过分布在系统周围的红外收发模块,探测小车运行轨迹,实时上传数据到处理器;处理器根据红外探测数据,采取模糊控制策略,输出下一刻电机运行的状态,从而控制小车运行的轨迹。
3 模糊控制决策输出
系统软件设计上,主控制器采集了实时探测的红外信号,作为小车运动的方向判决,由于需要较强的实时性,因此本文提出的控制方法采用了模糊推理机制对参数进行处理,得到模糊可靠的输出,以满足系统的实时性要求。模糊控制系统输入为当前运行路径与期望运行路径的偏差以及偏差的变化率,系统输出为所计算的控制量纠正量。输入变量为A,B(路径偏差、偏差变化率),输出变量为U(控制量纠正量)。控制规则表示为
Ri:ifA is Aiand B is Bi then C is Ck (1)
其中Ai,Bi,Ck分别表示语言词集。主通道模糊控制器的输入为E和EC,输出为U,设定E,EC和U的论域均为:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}.对应的模糊语言子集为{NB(负大)、N(负中)、NS(负小)、ZO(零)、PS(正小)、PM(正中)、PB(正大)}.通过比例因子ke和kec将偏差e和偏差变化率ec转换为模糊学习控制器的输入论域E和EC,通过量化因子ku将控制器的输出转化为实际控制量C.

根据在校正过程中要遇到的各种可能出现的情况和相应的调整策略得到控制规则表如表1所示。
表1 模糊规则表
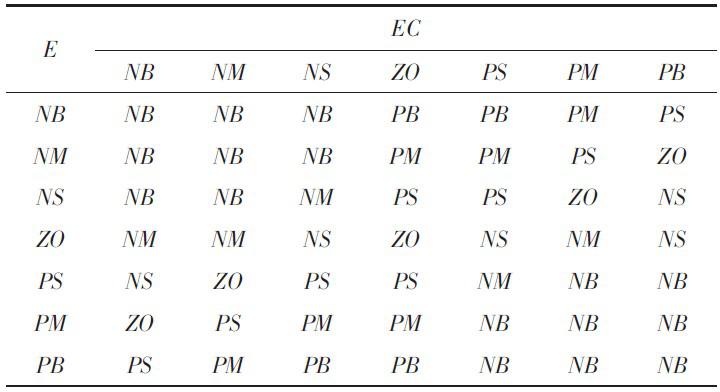
对于整个模糊控制器决策,在t时刻采样周期内,由公式(2),根据路径误差和误差变化率E,EC,由模糊判决表查出相应的U,并由量化因子ku计算得到实际控制输出C.控制算法实现步骤如下:
1)计算拥塞控制系统的输入状态。
2)根据参考模型的输出与实际对象输出计算e,ec.
3)根据参考模型误差和误差变化率E,EC.
4)计算规则自校正模糊控制器的输出U.
5)由模糊控制的量化因子计算最终的实际控制输出C.
4 仿真研究
该系统设计及软件算法研究在Matlab 7.0环境下进行软件仿真。预先设定小车运行的期望轨迹为yd,根据模糊控制方法设计的小车实际运行轨迹为y,仿真的目的是检验该系统设计的小车,在运行过程是否能根据预设的轨迹运行。仿真的结果如图3所示,横轴为运行时间,纵轴为运行的距离。仿真结果显示,小车运行初始状态,不同出发点时与期望路径有偏差,可能达到50%以上;在运行过程中,小车运行逐渐接近预设的轨迹,其后整体的偏差小于5%.系统运行稳定以后,在给定期望轨迹下,探测小车系统能较好的跟踪期望轨迹。
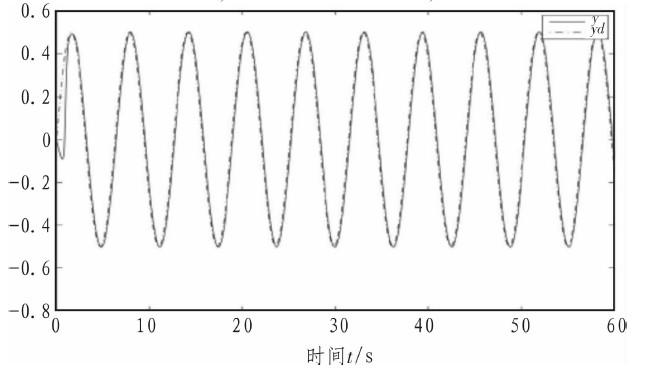
图3 系统实际路径与期望参考路径
5 结论
该小车探测系统采用基于高性能Cortex-M3处理器,图像传感器、温度传感器和红外探测器综合设计的硬件平台,软件设计采用模糊控制策略的思想,提高了系统的可靠性和稳定性。该测试系统在专业仿真软件平台Matlab下进行,仿真实验结果表明,小车系统能较好的实现探测、数据采集、跟踪轨迹等功能,达到了设计要求。
-
处理器
+关注
关注
68文章
19399浏览量
230728 -
温度传感器
+关注
关注
48文章
2971浏览量
156279 -
cpu
+关注
关注
68文章
10901浏览量
212631 -
图像传感器
+关注
关注
68文章
1915浏览量
129643
发布评论请先 登录
相关推荐
cortex-m3的操作模式及特权级别
基于Cortex-m3的指纹识别考勤系统硬件设计,
求基于Cortex-M3与Android的智能家居控制系统解决方案
Cortex-M3 技术参考手册
基于Cortex-M3智能无线温度测量系统设计


基于ARM Cortex-M3的运动控制系统与算法设计
Cortex-M3处理器内核与基于Cortex-M3的MCU关系

ARM Cortex-M3系统设计与实现





 工商网监
工商网监
评论