 机器人的移动监督式控制器设计
机器人的移动监督式控制器设计
1. 引言
战争是人们所不愿意见到的,但有时是不可避免的。为了在战争中取得优势,尽可能的减少人员伤亡和经济损失,世界上许多国家都投入大量的人力、财力研究制造军用机器人。陆地微小型探查机器人是军用机器人的一种。它具有体积小,结构简单,成本低廉,研究周期短,易实现“群”攻击等特点。在真实战争中不易被发觉,容易靠近目标,可以获得大量真实可靠和及时的数据。所以在现阶段直接的战斗型机器人还没有突破性进展的时候,探查机器人成为军用机器人研究的热点。
本文以中国科学院沈阳自动化研究所正在研制的小型地面探查机器人“山羊号”为试验基础,实现了机器人的监督式控制器的设计,并在这个机器人平台上验证了监督式控制的方式的理论可行性和优越性。
2. 监督式控制与其他控制方式的比较
移动控制器的设计是微小型探查机器人的一个研究重点。发展现代机器人控制系统的实践经验表明,在现有的理论和技术水平下,研究具备高度智能的全自主机器人的技术条件还远未成熟;对于野外机器人来说,由于通讯可靠性和时延性无法保证,环境多样性复杂性导致信息获取有限,纯手动遥操作导致控制可靠性下降,复杂性增加。所以,研究和设计面向特定任务特有环境下的监控式移动机器人是一种较为现实和可行的做法。
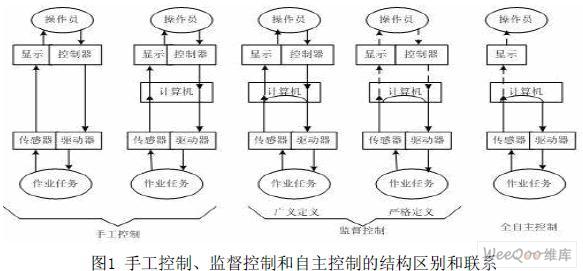
监督控制最早由Ferrell和Sheridan于1967年在美国月球车计划中明确提出。Sheridan对于监督控制的定义为:一个或多个操作员间断编程且连续不断地从计算机接收信息,计算机利用传感器和驱动器控制进程或任务环境,负责闭环回路。监督控制两个重要地体现方式是共享控制和交互式控制。交互式控制定义为:操作员先执行一部分工作,然后让机器人自主地执行另一部分工作;共享控制定义为:操作员处于遥操作状态,机器人处于自主状态,二者同时执行任务。Sheridan曾列举了计算机和人的4种相互关系:延伸(extend)、分担(relieve)、备份(backup)、代替(replace)。人工控制,监督控制和自主控制体系结构上的区别和联系,如图1:
3. 系统构成
野外探查机器人的用途决定这个机器人的结构必须简单,可靠,具备可替换和易升级的标准,使其富有生命力。
3.1 硬件构成
该机器人使用履带—腿复合移动机构,复合型移动机构主要是为移动机器人在非结构环境中应用而研究的,目的是提高其非结构环境中的通过能力。项目称之为“山羊号”机器人,见图2:
核心主控制器使用了瑞士数字逻辑公司提供的PC104。作为一种比较新型和强大的总线形式和专用控制设备,PC104 采用了标准的积木式硬件结构,容易扩展功能和端口;具有强大的运算能力,使机器人具有处理速度快能力强的特点;具有良好的耐热、耐寒、防潮、抗震性能,适应恶劣的野外条件。控制台系统采用了与PLC 类似的德国WOGO 工业MODBUS 适配器作为控制核心,上位机下位机之间的通讯遵循了MODBUS 协议通过无线数传电台实现。WOGO 工业MODBUS 适配器模块化的软件设计,稳定可靠,非常适合于机器人控制台数据采集和数据显示等应用。
机器人运动控制系统是机器人控制各轴电机实现遥操作的核心。本系统采用了DeltaTau 公司提供的PC104 接口的PMAC2 型运动控制卡,可以同时控制四个电机,实现四轴联动。可以实现:执行运动程序、进行伺服环更新、电机的换相更新、软硬件安全资源管理、与主机通信、任务优先级组织等等功能。是一块极其强大的运动控制卡。无线数据通讯系统采用美国MDS 无线数传电台,具有标准RS232 通讯口,采用无线扩频技术,使用220M 频段,主要用于远程无线点对点或多点间无线数据通讯,传输速度可以达15.2Kbps,使用2db 天线室内通讯距离可以达到300 米。
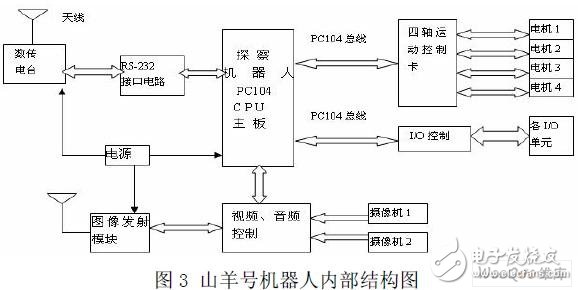
机器人观察系统采用SURF 系列无线图像发射/接受系统,由两个摄像头及一套无线图像发射/接受系统构成,两个摄像头分别安装在机器人本体的前端和本体上端。通过返回远程图像实现对非结构环境下的远程监控。机器人内部结构如图3:
3.2 软件构成
山羊号的软件系统分为五个部分:机器人底层动作级控制模块;上位机的研究人员的操作环境以及人机交互界面;上位机和机器人的通讯机制以及指令数据收发机制;机器人上的视觉采集传输模块;上位机和下位机(机器人本体)的人工干预和切换控制机制模块。机器人底层动作级别的控制由Delta Tau 的运动控制卡完成,它可以同时对四个电机进行控制,实现行走、摆臂、转弯、翻身、支起等基本动作和一系列动作组合。
人机交互模块基于windows 编程,通过WOGO 的MODBUS 适配器返回机器人状态,并且显示机器人摄像头采集到的图像。操作人员可以在已有的机器人动作级别指令和任务程序的基础上,添加新的任务程序或者修改现有指令程序。
因为山羊号的本体操作系统是嵌入式实时多任务系统QNX,它可能会同时进行或者完成多任务,因此协调的通讯就很重要。其中包括:
(1)上位机和下位机的无线通讯,包括状态数据反馈和控制指令的下达。
(2)主控制器PC104 和运动控制卡间利用串口进行的通讯,监督任务的完成和动作的安全准确。
(3)QNX 提供的多任务能力时各个任务间的通讯。
(4)I/O 口上的可以扩展的各类传感器与PC104 的通讯。
上位机和下位机(机器人本体)的人工干预和切换控制机制的实现方式主要有两种。一是操作员直接接管机器人的控制,通过上位机操作杆控制机器人动作,并且由人完成任务规划,此时机器人类似人工控制;二是操作员监督机器人的任务执行,并且由就人或者机器人主动发起中止任务和接替的指令,以保证任务的正常执行和机器人的安全。这里面实现了监督控制的思想。
监督式移动机器人控制器主要完成的功能有:
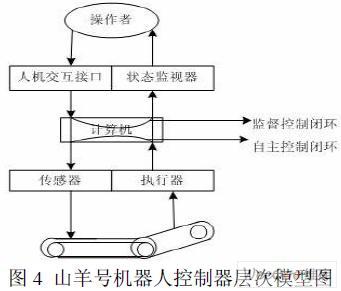
(1)外界环境信息、传感器、处理器和动作执行机构形成闭环,实现机器人局部自主能力的底层控制环;
(2)接收、相应操作员指令,完成人工干预和替换机制,形成人机控制闭环。因此,山羊号监控系统主要分成两个子系统,它的层次模型如图4,对应监督控制的定义,显然它是一个监控式机器人控制器。
山羊号机器人控制器的任务执行和控制流程如下:
(1)操作者拟出任务规划,并生成机器人可完成和可以接受的一个动作序列的机器人语言指令;
(2)将指令传到机器人本体,由机器人控制器接收并完成;
(3)如果任务规划已经加入知识库中,操作者调出对应任务代号并监视机器人完成;
(4)对于已经加入知识库的任务,机器人在传感器信息的支持下自主完成,操作者仅作为监视者;
(5)在任何状态和控制方式下,操作者通过返回信息发现异常情况,均可以干预或者紧急中止任务,将前面任务指令作废,完全转入手动控制;
(6)给机器人本体加入自主中止模式,在任务执行过程中,如果由于延时或者故障等原因造成信息无法及时反馈,机器人由传感器信息判断如果情况危及机器人安全或者任务序列无法继续执行,将中止任务等待人工进行任务的恢复或者取消。
4. 实现情况
现在该机器人已经可以实现上下标准人行楼梯、跨沟(小于30cm)、翻倒自动复位、上下高台(高度小于30cm)、在沙地行走等功能。人机具有了较好的协调性和控制性。如上图2 可以看到其对应的某些行为能力。
5. 结论
监督式控制器在野外移动机器人的控制上有着良好的适应性,操作者可以通过监视器和状态反馈观察任务执行,大大减轻了操作者的工作压力和技能要求;机器人具有一定的自主能力,并且在监控层次模型下,可以进一步开发机器人的自主能力,很容易进行系统的升级,也可以作为机器人自主控制的研究平台;人、机分别可操作的紧急模式,在远距控制中,对于信号延误、非结构环境的不确定、机械和电子故障等情况引起的机器人安全性问题,有了一个比较稳妥和可行的方案。在后续的研究中,将会进一步装配各类传感器,提高机器人的自主能力,加入机器人在线学习更新知识库的能力,改进操作者界面使其更加人性化等,使得山羊号既能成为一个开发研究平台,同时也能成为一个实际可靠可用的产品。
-
传感器
+关注
关注
2550文章
51040浏览量
753096 -
控制器
+关注
关注
112文章
16335浏览量
177815 -
机器人
+关注
关注
211文章
28388浏览量
206921 -
计算机
+关注
关注
19文章
7488浏览量
87855
发布评论请先 登录
相关推荐
Labview My RIO 移动机器人
如何利用ARM研究嵌入式服务机器人控制器?
如何设计智能灭火机器人控制器?
【送货上门】SC3150三协机器人控制器
如何实现移动机器人的设计?
基于RTX51的排爆机器人嵌入式控制器软硬件开发怎么样?
差速移动机器人轨迹跟踪控制方法
机器人是什么?
通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现


因为专注 所以专业 | 科聪移动机器人专用控制器重磅来袭






 工商网监
工商网监
评论