 采用了FPGA微处理器和数控系统开发的钢卷尺自动切零系统
采用了FPGA微处理器和数控系统开发的钢卷尺自动切零系统

钢卷尺是人们日常生活中常用的量具,在钢卷尺的生产过程中,钢卷尺印刷完成后卷成一盘上千米长的尺带盘,需对其进行切零。钢卷尺的切零质量直接影响着尺带的整体质量以及生产中产生废品的概率。目前我国许多钢卷尺生产企业的钢卷尺切零仍停留在半自动切阶段,由电机完成送带,人工进行尺带的瞄准和切带,存在人为因素多、劳动强度大、生产效率低等弊端。
1.1 系统的工作原理
系统工作原理如图1所示。系统通过K1700B控制器,定长快速精确(±2mm)送带,中心控制器实时对CCD采集的图像进行处理并输出位置和瞄准信号。快速送带完成后,数控装置接收位置信号后,根据收到的位置信号控制送带方向,进行慢速精确瞄准,数控系统收到来自中心控制器的瞄准信号后,停止电机送带,自动冲切尺带,最后由出带机构完成自动出带。
图1 钢卷尺自动切零机原理结构图
1.2 零位动态识别一自动瞄准原理
钢卷尺自动切零的关键是瞄准刻度线的位置识别与自动瞄准,是通过中心控制器来实现的。通过对FPGA的编程实现在监视器上发生两条静态视频分划竖线。和一条动态视频横线旧,(竖线的左右位置以及横线的左右、上下、长短都可通过按键调节)。两条视频竖线作为瞄准基准线,通常企业选择18cm刻度线作为瞄准刻度线,切带位置和瞄准基准位置间距就为18cm。在钢卷尺的刻度线纹中,厘米刻度线比毫米刻度线长,利用这个特点可通过视频横线来选择瞄准对象。
瞄准刻度线的动态识别是通过动态扫描选中需要瞄准的刻度线,然后确定瞄准刻度线关于基准点的方位(基准点的左边还是右边)。为了防止在实际工作中钢卷尺在快速输运过程中产生上下窜动而引起误识别,系统采用动态扫描技术来确定瞄准刻度线。其原理如下,待调节好两竖线的间距(约为瞄准刻度线宽度的80%)和横线的长度、位置后(横线长度不超过10ram,均布于竖线两侧),在视频横线所覆盖的区域上,一旦有一根以上或没有刻度线时,视频横线就自动往下扫描(扫描区域设置为40行,扫描到最底端后,横线回到起始位置从新往下扫描),直到横线所覆盖的区域上只有一根刻度线为止。在快速送带精度保证下,瞄准刻度线始终位于瞄准基准线±2mm范围之内,所以视频横线最多而且必定只选择瞄准刻度线作为瞄准对象。选中瞄准对象后系统进行位置识别,以左竖线与横线的交点为基准判断瞄准对象位置,分辨出瞄准刻度线位于基准点的哪一边,根据位置识别的结果,数控系统决定尺带做瞄准运动的方向,控制送带电机进而控制水平运动工作台带动尺带往相应的方向运动。瞄准系统实时进行瞄准工作,当瞄准刻度线即18cm刻度线与两视频竖线重合时瞄准系统发出瞄准信号,数控系统控制送带电机停止运动,以此实现钢卷尺切零位系统的自动瞄准。
1.3 系统组成
钢卷尺自动切零系统由3个子系统构成:进带系统、位置识别与瞄准系统、切带与出带系统。其原理结构图如图1所示。进带系统通过进带电机和送带电机实现快速送带过程。为了使送带过程平稳,防止损坏尺带,在两个电机间设置了一调节轮。调节轮的另一端与调节电位器相连。当送带电机转速比进带电机快时,调节轮被向上提起从而改变了电位器的阻值,使变频器输出的时钟脉冲频率变高,进带电机的转速也就越快,直到进带电机转速和送带电机转速相等时,变频器输出的时钟脉冲频率不变。反之,当送带电机降速时,进带电机也跟着降速,保证了进带和送带的同步性。定位瞄准系统主要由做水平瞄准运动的工作台和自动瞄准模块组成,在上带时,可通过调节手动手柄来微调零位位置,使尺带的“0”刻度线与冲切的刀具对齐。压带机构前端与尺带接触的压头设计成与尺带形状吻合的弧形结构,所用材料为尼龙,以防止压坏尺带。切带与出带系统由气缸、冲床、出带电机等组成。冲切气缸控制冲床向下冲压,切断尺带。出带电机处于常转状态,完成切带后,出带气缸控制出带压轮下压,在出带电机的带动下,将切好的尺带自动送出。
2 系统硬件
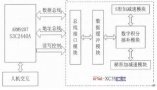
系统硬件结构由双控制器及相应的功能模块组成,如图2示,主要由基于FPGA的中心控制器、KT700B单轴数控系统、送带和瞄准运动系统、气动系统等组成。各个功能模块间通过通信线进行信号传输,在控制器的控制下协调工作。
2.1 中心控制单元
中心控制单元的主要功能是对CCD采集的视频信号进行处理,输出瞄准刻度线的位置信号和瞄准信号。图3为中心控制单元的组成框图,其中虚线内表示FPGA要实现的功能。中心控制单元主要由二值化电路、同步分离电路、FPGA、叠加电路等组成。视频信号输入后经同步分离电路分离出行同步信号和场同步信号,根据视频分划原理"。,通过对FPGA编程生成两条静态视频竖线和一条动态视频横线的控制信号,相与后控制叠加电路,即可实现显示屏幕上简单几何图形与视频图像的叠加。视频信号二值化后,以横线控制信号作为时钟基准,以视频二值化信号和“0”电压信号作为选择对象,选出监视器中横线所覆盖区域的图像的二值化信号,输入到瞄准模块和位置辨别模块。瞄准时以两条竖线与横线的交点作为瞄准的时钟基准,视频横线选出的二值化信号作为瞄准对象来实现瞄准。位置辨别时以左竖线与横线的交点为基准点,以横线选出的二值化图像信号作为时钟基准,以左竖线与横线的交点的延时信号作为判断对象,辨别瞄准刻度线在基准点的哪一边。最终,中心控制单元输出瞄准信号和位置信号给数控系统。同时为了有效地抑制系统噪声,消除接地回路的干扰,提高系统的响应速度,对输出信号进行了光电隔离。
图3 基于FPGA的中心控制单元原理框图
2.2 数控系统
数控系统采用的是上海开通公司生产的KT700B单轴数控系统,其主要功能是对电机和气动系统的控制。开始工作后,由数控系统控制压轮下压,送带电机快速转动。送带完成后,开始接收中心控制单元的位置信号和瞄准信号,控制进带电机进行慢速精确瞄准,收到瞄准信号后,控制冲切汽缸完成切带,最后控制出带压轮下压完成出带。
3 系统软件
系统软件部分包括FPGA的程序以及数控器的程序。FPGA的主要功能是生成两条静态视频竖线、一条动态视频横线的控制信号以及产生瞄准和位置信号。数控系统控制气动系统和送带电机,实现压带、快速送带、慢速送带,出带等操作。图4为系统软件的控制流程图。
图4 系统软件流程框图
4 系统精度分析
影响钢卷尺自动切零机切带精度的因素主要有:钢卷尺上带调整误差,零位动态瞄准误差以及其他随机误差等。在上带调整后,瞄准基准线与切带位置距离的值和瞄准刻度线示值的差值就是上带调整误差。上带调整误差的大小与操作工人操作熟练程度有关,一般
零位动态瞄准误差是由于钢卷尺的零位瞄准是动态瞄准而产生的误差。零位瞄准电路的瞄准扫描周期r为20ms,在零位瞄准电路工作时,钢卷尺在瞄准运动系统的带动下,一直处于运动状态。系统使用的送带伺服电机在慢速送带时的线速度为1.5mm/s,即慢速送带时钢卷尺的速度为1.5mm/s,那么瞄准误差为:
除了上面所说的两种误差外,系统还存在着其他随机误差,根据工厂经验,这些误差综合起来一般在0.05mm左右,因此自动切零位系统总误差小于0.08mm。
5 结束语
采用了以FPGA为核心的中心控制单元、KTT00B数控系统等,在进行软硬件模块化设计的基础上,开发了高性价比钢卷尺自动切零系统。它不仅大大降低了操作工人的劳动强度,提高了生产速度,而且也提高了零位瞄准时的精度。图5为钢卷尺自动切零系统实物图。该系统已应用于企业生产实践中,切带精度优于±0.08mm,切带速度为2~3s/条,企业反响良好。
-
FPGA
+关注
关注
1664文章
22502浏览量
639191 -
微处理器
+关注
关注
11文章
2440浏览量
86144 -
数控系统
+关注
关注
5文章
270浏览量
25922
发布评论请先 登录
基于ARM和FPGA的嵌入式数控系统设计
【TL6748 DSP申请】数控系统开发
基于ARM和FPGA的嵌入式数控系统该怎么设计?
基于ARMS和FPGA的嵌入式数控系统该怎么设计?
基于ARM数控系统的PC104总线设计
基于DSP的机床数控系统设计
基于ARM与FPGA的嵌入式数控系统设计





评论