 基于主动遥感技术和匹配滤波技术的电子学系统的设计
基于主动遥感技术和匹配滤波技术的电子学系统的设计

激光测高技术是利用搭载在卫星上的激光测高仪向地球发射激光脉冲,激光脉冲经过地面或者海面反射后,由测高仪接收返回的激光脉冲回波。回波波形随激光足印内的被测表面特征而发生变化,其中包含被测表面的粗糙度、倾斜度和反射率等重要信息。通过处理和分析可以得到地球表面的地壳、地貌、地球植被、海洋形态和海水参数等信息。激光测高仪不仅要具有普通的激光测距机的距离功能,还对回波波形的保真度提出了更高的要求。因此,对测高仪的电子学系统提出了更高的要求。激光测高仪电子学系统设计总体框图如图1所示。
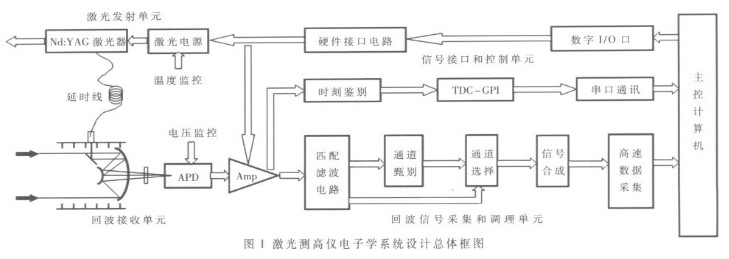
根据激光测高仪电子学系统中各环节所完成的功能,可以把整个电子学系统分成三大部分:回波信号采集和调理单元、激光飞行时间鉴别和处理单元、数据采集和接口控制单元。其中,回波信号采集和调理单元主要完成激光测高仪信号的光电转换、增益调整及匹配滤波工作,为后继信号的采集处理做好准备。飞行时间鉴别和处理电路用于辅助完成激光测高仪的测距工作,提供测距值的一个备份。数据采集和接口控制单元实现主控计算机对测高仪信号的采集、信号增益的控制、激光输出频率的控制等一系列工作。
1 回波信号采集和调理单元
回波信号采集和调理单元由雪崩式光电二极管(APD)、前置放大电路、匹配滤波电路以及优先触发通道选择组成,主要实现以最佳信噪比提取激光回波信号。APD将回波光信号转换为电信号后,经前置放大、匹配滤波等信号调理后,由优先触发选择通道送入主控计算机的高速数据采集单元进行波形采样,记录波形动态信息,便于软件分析波形的宽度和面积特征,最终为提取目标信息提供参数。
1.1 APD光电探测器
激光测高仪选用探测器主要考虑两个重要参数,即响应时间和光谱响应度。激光测高仪的发射脉冲宽度决定了对探测器响应时间的要求,通常要求探测器的响应时间要比光脉冲宽度短一个数量级以上;激光器的发射波长决定了探测器的光谱响应度,探测器的峰值响应波长应当尽量接近激光测高仪的工作波长,光谱响应度要高、且暗电流小。探测1 064 nm 波长的激光测高仪回波信号常采用红外增强硅-雪崩光二极管(Si-APD)接收。它具有体积小、响应速度快、高频特性好、低噪声、高增益等特点。本项目中使用EG&G公司生产的光电探测组件C30954E。C30954E主要参数如表1所示。

1.2前置放大电路
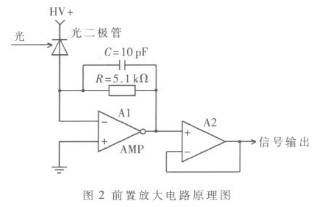
光电探测电路对前置放大器的带宽、输入偏置和噪声有着严格的要求,合理地设计该电路对整体系统的探测能力起着至关重要的作用。根据C30954E的时域响应特性,可以计算出放大器的-3 dB带宽应达到125 MHz。在满足带宽要求的前提下,高输入阻抗、低偏置输入以及低噪声电流便成为主要的设计选型因素。为此在前置放大电路设计中采用了TI公司的宽带宽、低噪放大器THS4012来构造基本的前置放大电路,电路设计的形式为带电阻反馈的互阻放大电路。由于探测噪声会随着放大器带宽的增加而增大,所以在前置放大电路设计中在反馈电阻上并联了一个小的电容来限制噪声,尽管会影响系统稳定性,但通过合理选择电容可有效地提高系统探测信噪比。前置放大电路的原理图如图2所示。
1.3 匹配滤波电路
激光测高仪要关心脉冲波形的保真度,以便高速采集卡准确记下信号的波形以供后续分析。系统在此对滤波器提出了以下两点要求:首先它要以最大的信噪比提取信号。其次,滤波器在以最大信噪比提取信号的基础上还要保持信号的波形,这样才能继续对经波形瞬态记录仪采样后的数字信号进行脉冲宽度和能量的测量。综合以上两个方面的考虑,激光测高系统中选用具有恒定群时延特性的贝塞尔滤波器。考虑到系统的体积和功耗要求,滤波器的体积和功耗都不宜过大,所以选择正反馈的Sallen-key双二次滤波器节级联实现贝塞尔低通滤波器,阶数为5阶,其传递函数为:
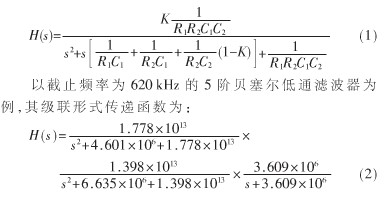
依据传递函数可求出5阶贝塞尔低通滤波器的最终级联式电路,如图3所示。
1.4 优先触发通道选择单元
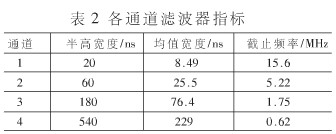
在匹配滤波器的选择、设计中了解到匹配滤波器的截止频率是由滤波信号的半高宽度确定的。但是由于目标地面的特性以及大气传输等因素的影响,激光测高系统的回波信号半高宽度τ是一个变量。对于固定结构的匹配滤波器,τ的变化会使信号与滤波器不匹配,则输出信噪比会减小,影响回波探测。为了解决这一问题,系统中采用多通道接收,以满足对不同地形、地物特征的识别。各通道匹配滤波参数可在大量观测回波信号的基础上,由回波信号的统计特性得出,由表2给出。
激光测高仪在进行测量的过程中会时时遇到不同的地形、地物特征,但对于某一特定目标,4路匹配滤波通道只能有1路信噪比最大的通道有信号输出。为此在电路设计中加入了优先触发选择通道的设计。优先触发通道选择电路的结构框图如图4所示。
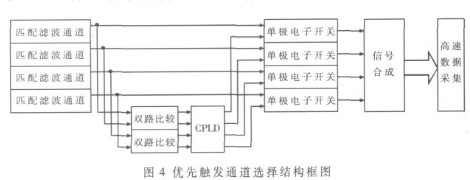
优先触发通道的选择是通过CPLD器件控制4路高速单级电子开关来实现的。对不同的地形、地物,4路匹配滤波器输出的信噪比不同并同时存在一定的时延,只有与该测量目标物特性最匹配的通道输出信号的时延最小,信噪比最高。其中CPLD为-7型器件,电子开关以及高速比较器的响应时间都为纳秒量级。
2 激光飞行时间鉴别和处理单元
在系统设计方案中,对于距离测量这一功能,设计了两套技术方案:一是直接利用高速数据采集得到光触发信号与回波在时域的分布信息,换算出距离值。采用这种技术方案可以在实现对回波波形采样的同时根据波形信息计算出距离信息,具有方便、快捷的优点,这是软件实现的距离测量。另一套技术方案就是采用硬件设计,基于延时线的方法直接解算出距离信息[7]。两套技术方案互为备份,保证激光测高仪测距的有效性。TDC-GP1是ACAM公司基于0.8μmCMOS工艺设计的高精度时间数字转换芯片,可对两个脉冲或多个脉冲之间的时间间隔进行精确测量,单通道测量精度为250 ps,双通道耦合精度可达150 ps,测量范围从3 ns~200 ms不等,图5所示为包含GP1的激光测高飞行时间测量结构图。
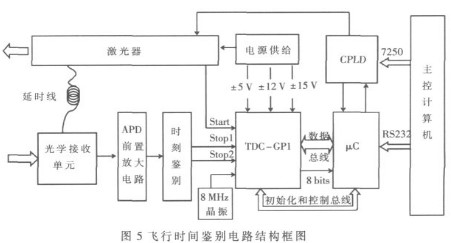
工作过程为在主控计算机控制激光器发射激光的同时先产生Start信号进入GP1作为测量开始信号,在激光发射出去的同时有部分光被耦合进入光纤引导直接进入接收望远镜产生Stop1自校正信号,以得到因光路和电路而产生的距离漂移误差,同时为避免激光调Q影响内校正光路的波形;发射光发射出去经目标物反射后被接收单元接收产生Stop2信号,则两个停止信号与一个开始信号之间的时间间隔被测出后直接相减,再加上光在光纤中传播的距离就可得到目标物与测高仪之间的距离,整个飞行时间测量模块是以TDC-GP1为工作核心。
3 数据采集和接口控制单元
激光测高仪整机的运行都是围绕着主控计算机进行的,主控计算机通过集成在其内部的数字I/O接口板卡、高速数据采集卡以及外部信号接口电路共同实现对激光测高仪系统工作状态以及时序的控制。在电子学系统设计中采用了一个采样率高达2 GHz的数据采集卡,通过调用采集卡动态链接库,实现对该采集卡的二次开发。通过一个数字输入输出卡和外围接口电路配合,依托虚拟软件平台实现对激光脉冲频率控制电路以及温度检测电路的调整。
激光测高仪高速数据采集采用基于PCI的数字化板卡CompuScope 82 G。单通道实时采集率为2 GHz/s,双通道实时采集率为1 GHz/s,存储深度为2 MB。信号带宽为500 MHz,最大为1.2 GHz。信号传输采用Bus Mastering传输格式。传输速率为80 MB/s。激光测高仪的主控计算机通过数字I/O口来完成对外围电路的控制、检测工作。接口电路在硬件设计上其模拟电路部分被移到了一块背负式电路板上,使得模拟地与数字地完全隔离,减少了PCI总线与模拟输入部分之间的信号交扰。控制卡采用凌华公司PCI-7250数字控制卡,其工作原理如图6所示。
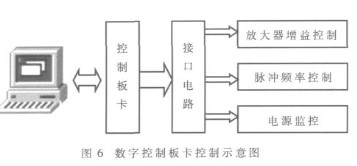
该卡基于32位PCI总线,即插即用,具有8路继电器输出,8路光电隔离数字量输入。板上带有继电器驱动电路以及数字量输入信号调理电路,所以可方便地实现对外部数字信息的读取以及输出数字量控制外部接口状态。数据控制卡通过DB37数据线与接口控制板卡一起实现主控计算机对激光测高仪的控制工作。该控制工作包括:通过控制CPLD实现对激光器输出脉冲的调整;根据回波信号幅度调整主级放大器的增益,改变主级放大器的增益带宽及耦合方式等。
4 实验和结论
从测高原理可以看出高精度、实时地测定激光测高仪到被测物体之间的距离是测高仪满足各项测高功能的必要条件。因此,激光测高仪的关键在于激光测距精度。下面给出激光测高仪系统设计完成后的一些具体的实验数据。根据需求,激光测高仪要求在500 km的卫星轨道高度进行对地测量时,测距精度达到±1 m。因为实验条件的限制, 这里采用消光法模拟500 km的测程,目标物为1.3 km外的靶场,在靶场室内放置一块1 m×1 m、对1 064 nm激光波长反射率为99.25 %的漫反射板,距离墙壁3.9 m。当激光束分别作用在漫反射板和墙面时,采用高速计数法来计算参考脉冲的峰值和回波信号的峰值之间的距离,得到如图7的实验结果。
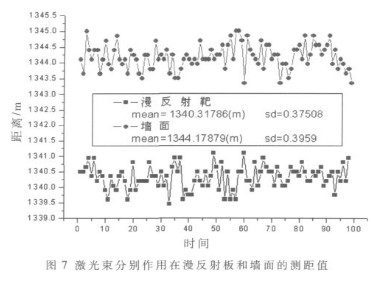
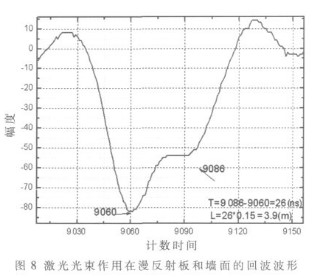
在上述实验装置中,平行于墙面缓慢移动漫反射板,当激光的光斑部分(用He-Ne光作为参考光)作用在漫反射板上,剩余部分作用在墙上。可以获得如图8所示的波形。可以看出,两次测距精度都在±0.4 m以下(sd=0.375和sd=0.396),从图中还可以得出两次测量的平均间距为3.86 m,与实际距离3.9 m非常吻合。从图8中可以看出,回波中的两个峰值分别对应着激光光束作用在漫反射板和墙面的位置。这两个目标物可以清楚地分辨开来。回波峰值的不同是因为激光光束作用在目标物的能量分布得不相等和目标物的粗糙度不同造成的。从上述实验结果可以看出,测高仪的高精度距离测量和回波信号的保真度都得到了保证。
-
cpld
+关注
关注
32文章
1259浏览量
174210 -
激光
+关注
关注
21文章
3711浏览量
69844 -
探测器
+关注
关注
15文章
2772浏览量
76070
发布评论请先 登录
招聘遥感技术研究工程师
无人机遥感技术
无人机遥感技术
无人机遥感技术的特点及应用
遥感技术的发展史,中国卫星遥感技术的发展现状
关于无人机遥感技术的全面介绍
无人机遥感技术简介及实例应用
遥感技术的特点有哪些
遥感技术在药用植物资源中的应用
高光谱遥感技术及其水利应用进展2.0




评论