 采用激光测距和超声波测距相结合的汽车防碰撞系统设计
采用激光测距和超声波测距相结合的汽车防碰撞系统设计
1.引言
随着汽车技术的不断进步,尤其是自动驾驶技术的发展,越来越多的距离检测设备将会不断面世。目前,运用于汽车测距主要有以下四种方式:毫米波雷达测距方式;摄像系统测距方式;激光测距方式;超声波测距方式。毫米波雷达存在电磁波相互干扰问题,摄像系统则造价高昂,均难以在汽车上普及。激光测距具有测量时间短、量程大、精度高等优点,适应汽车从低速前进到高速前进的测距需求,避免汽车高速行驶时因测距速度慢造成的测距失准现象。超声波测距原理简单,制作方便,成本比较低,但其只适用于较短距离低速测距,故将其应用于汽车倒车时测距。本文提出的将激光测距和超声波测距相结合的安全报警系统,旨在帮助驾驶员在汽车多种行驶状况、多方位探知并显示车辆与周围障碍物的距离,当障碍物距离小于设定安全距离时给驾驶员警报,避免驾驶员反应不及时引发交通事故。
2.防碰撞系统的方案设计
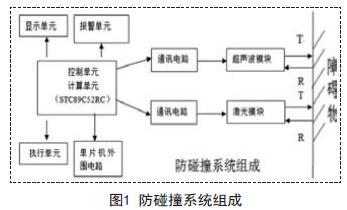
实现汽车防碰撞,关键还在于测距防碰撞系统的应用。本系统由测距模块、控制计算单元、显示单元、报警单元、执行单元等组成。其中测距模块包括汽车前进时工作的激光测距模块和汽车倒车时工作的超声波测距模块。两者分别通过各自的通讯电路与控制单元相连,可在汽车前进后退等多种工况对汽车周边障碍物进行全方位监测,并把汽车与障碍物距离传递至控制单元,控制单元通过连接的执行单元,报警单元等进行声光报警,主动制动等防碰撞功能的执行。系统组成如图1所示。
3.测距原理
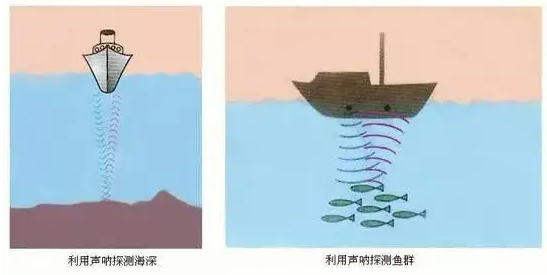
超声波测距的原理是脉冲反射式,即利用其反射特性来工作。原理如图2所示。
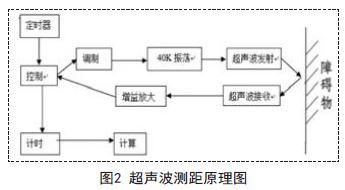
通过超声波发射器向某一方向发射超声波,在发射的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为C,而根据计时器测出发射和接收回波的时间差t,就可以计算出发射点距障碍物的距离S,即:S=Ct/2.
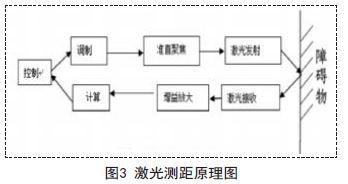
激光测距的原理(原理图如图3所示)与超声波测距原理不同,利用的是三角法测距。
发射器向前发射脉冲,碰到障碍物后反射回来的回波被接收器接收,回波的图像通过透镜汇聚到传感器上形成像点。当激光照射的物体移动时,像点也在传感器上移动,在基线长度已知、光源和传感器及透镜的相对位置确定的前提下,通过测量传感器上像点的位置就能准确确定被测物体与仪器之间的距离。
4.系统硬件及其运行
控制与计算单元的主体采用STC89C52RC单片机,该单片机是STC公司生产的一种带8K字节闪烁可编程可檫除只读存储器的低电压、高性能COMOS8的微处理器。
拥有灵巧的8位CPU和在系统可编程Flash,能够为众多嵌入式控制应用系统提供高灵活、超有效的解决方案。蜂鸣器和led灯组成报警单元,能够及时进行声光报警。
此外,本系统采用深圳盈勤科技有限公司生产的REALWAVE SRF020M01A激光距离传感器。该传感器采用高性能专用芯片设计而成,精度高稳定性好。单次测距输入指令为“a/A”,返回数据通过帧的方式包装发送。超声波传感器则采用市面常用的传感器。
汽车前进时,车速较高,除超声波模块部分系统全部开始工作。控制单元(单片机)通过RS232串行通讯电路向激光测距模块发送测距命令(“a/A”),控制激光测距模块向前发射光脉冲,模块接收到遇到障碍物反射回来的激光脉冲后分析计算汽车与障碍物距离,并通过RS232通讯电路将数据以16进制数包装发送给单片机,具体数值为“ee+06+* * * *+cc”,ee为帧头,cc为帧尾,第3个*表示16进制的测量结果。
单片机转化为10进制后使显示电路动态显示障碍物距离S,同时判断如S小于设定门限值K,则使报警单元的红色LED灯持续闪烁,蜂鸣器连续长鸣报警,提醒驾驶员及时采取防碰撞措施。一定时间后驾驶员仍未采取有效措施时,单片机使执行单元紧急制动刹车,主动避免发生碰撞。
汽车倒车时,车速较低,超声波模块代替激光测距模块工作。在单片机IO口大于10US的高电平信号控制下,自动向后发射8个40KHZ的方波。
超声波返回后单片机由INT0引脚高电平持续时间测得超声波往返时间,通过换算得到汽车与障碍物之间的距离。之后利用系统的各个单元实现与激光测距相同的防碰撞工作。
5.系统软件设计
图4为超声波测距软件设计,系统启动后,超声波模块向后发射超声波,接收超声波的同时开启定时器定时,由测量到的时间T计算得到障碍物距离S,显示单元动态显示连续变化的距离S.如果距离S小于设定的门限值,则系统进行声光报警,LED灯不断闪亮,蜂鸣器持续鸣响,提醒驾驶员及时采取措施避免碰撞。延时1秒后如果距离S仍小于设定的门限值,表明驾驶员未进行任何有效操作,故系统控制汽车紧急制动,主动避免防碰撞的发生。
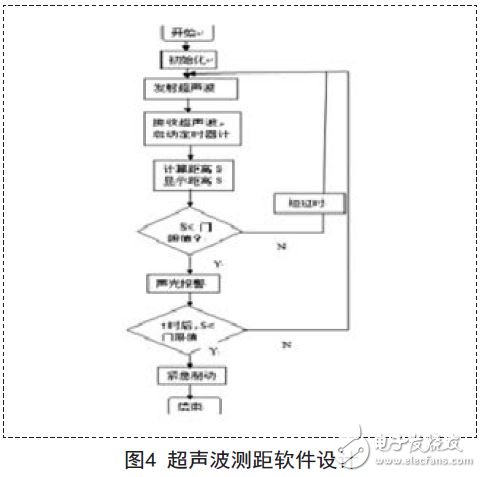
图5为激光测距软件设计,激光模块发射接收激光脉冲后,由模块内部电路同时完成计算距离S工作。如果S小于门限值则进行报警。
6.结论
系统选用了激光测距传感器和超声波测距传感器相结合的组合式测距方式。
单一传感器的测距方式受传感器的应用条件限制较大,难以满足汽车复杂的行驶状态和多变的外部环境,故本系统的优点显而易见。在汽车前进,倒车,低速,高速等多种行驶状态,本系统均能对汽车周围环境的障碍物进行有效的监测和测距,使汽车主动进行防碰撞,防止交通事故的发生,具有广阔的研究前景。
-
激光
+关注
关注
19文章
3312浏览量
65129 -
汽车电子
+关注
关注
3030文章
8068浏览量
168297 -
超声波
+关注
关注
63文章
3055浏览量
138950
发布评论请先 登录
相关推荐
毕业设计竞赛选题推荐 | 鸿蒙物联网应用之智能测距仪项目实战(含文档及源码)
安泰功率放大器应用:超声波水下传输距离如何测算
【CW32模块使用】US-016超声波测距传感器

E3F-DS30C4红外线漫反射光电开关和超声波测距的区别
RK3568教学实验箱_操作案例:5-19 超声波测距实验
电应普传感器 | 窖井水位监测超声波传感器应用方案

雷达探测障碍物是超声波还是次声波
第七章-V1.5 STM32超声波测距STM32F103C8t6超声波避障小车 超声波避障模块 STM32超声波测距

基于51单片机分立器件超声波测距电路图及程序元件清单
超声波驱动板-超声波它激式驱动板






 工商网监
工商网监
评论