 利用Fir-eAPI SDK开发IEEE1394b设备驱动程序设计
利用Fir-eAPI SDK开发IEEE1394b设备驱动程序设计
现有的大部分数据传输接口总线造价比较高,且难以满足实际运用中对传输速率的要求,成了阻碍整个系统性能提高的一大屏障。IEEE-1394是现今最高速的串行总线接口之一,IEEE1394lb更是在原有IEEE1394的基础上速度更快,支持距离更长,在实时批量数据传输方面有广泛的应用前景。
基于1394传输系统设备驱动文献,大部分都是基于IEEE1394a的,而IEEE1394b以其更高的速度展现出了更大的魅力,对实时大批量的数据传输具有重大意义,但是Microsoft并没有提供对1394b的支持,在Windows自带的1394不能支持其S800的速度,因此1394b在应用上受到局限,Unibrian提供了FireAPI SDK开发包,提供了对1394b的完全支持,也是现在唯一持1394b的驱动程序开发包。
1 IEEEl394串行总线概述
IEEE1394又称火线(Fire Wire),是由美国苹果电脑公司开发的一种品质高、传输速度快的串行总线技术。1995年IEEE正式认可IEEE139 4-1995规范,并于2000年又推出了IEEE1394a-2000规范。2002年推出了IEEEl394b-2002的传输速率可达3.2 Gb·s-1,兼容于IEEE1394a,但是接口的形状从IEEE1394a的6 Pin变成9 Pin。IEEE1394的主要特点如下:
(1)高速可升级,支持100 Mb·s-1、200 Mb·s-1、和400 Mb·s-1的传输速率。IEEE1394b增加800 Mb·s-1,16 00 bib·s-1,3 200 Mb·s-1的传输速率,现在市面上所提供的芯片最高支持到800 Mb·s-1。
(2)支持点到点传输,各节点可以脱离主机自主执行事务。
(3)支持较远距离的传输;IEEE1394节点之间的距离不能超过4.5 m。IEEE1394b最远距离可达100 m,而且可以选用更多的传输媒介,比如非屏蔽的5类双绞线、塑料光纤和玻璃光纤等。
(4)支持即插即用,可以在任何时候向IEEE1394网络添加或删除设备。
(5)热插拔,无需将系统断电就可以加入和移除设备。
(6)支持两类事务,包括等时(Isochronous)和异步(Asynchronous)事务。
(7)拓扑结构,设备间采用树形或菊花链拓扑结构,每条总线最多可以连接63台设备。
(8)公平仲裁,是等时传输具有较高优先级,同时异步传输也能获得对总线公平的访问。
2 IEEE1394b驱动程序的基本结构
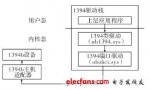
Unibrianl394驱动程序栈采用由上而下的架构,这个栈的核心就是1394类驱动,它完成1394所有事物并提供应用程序所需的全部服务。而这个1394类驱动正是WDM驱动中的类驱动。图1为Unibrainl394驱动栈。
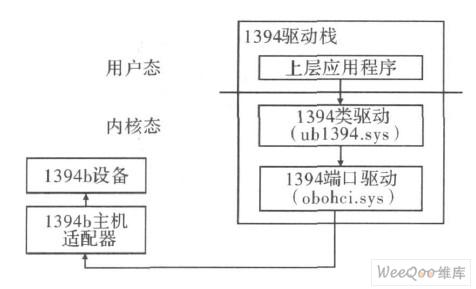
图1 Un ibra in1394驱动栈
3 IEEE1394b驱动程序的具体实现
3.1 驱动程序入口点
运用FireAPI的第一件事就是调用C1394Initializa,C1394Initialize执行所有对1394初始化支持的必需动作,这个函数会检查FireAPI驱动栈是否已完全安装,相应的驱动程序是否已经开始,以及初始化驱动栈需要的内部结构。
3.2 打开设备方法
当1394总线上添加或删除一个或多个设备时会自动重新配置物理设备地址,以此来支持即插即用特性,这时设备物理ID的重新分配,设备的节点号可能会改变。不过1394要求每个节点都要有一个全球惟一标识符GUID,它存储在Bus_Into_Block,在设备的整个生存期它是惟一不变的,所以在程序中根据设备的GUID打开设备句柄,其传输时将不用担心总线复位及物理ID改变。
4 IEEE1394b具体通信机制
IEEE1394串行总线支持两种传输类型;异步传输和等时传输。
(1)异步传输,异步传输使用确定的物理地址来指向某一个节点,以完成读、写、锁定操作。基于请求和应答的机制来确保数据传输的正确性。
(2)等时传输,等时传输是一种不需要确认数据的传输类型,它主要强调的是传输数据的实时性。等时传输是通过一个6位的信道号码来确定一个或多个设备。其以固定时间间隔(125 ms)发送数据,所以必须分配固定的总线带宽,有着高于异步传输的优先级。等时传输所用的最大带宽是整个带宽的80%。
4.1 IEEE1394b异步传输
异步传输的主要步骤如下:
(1)设置传输速度,1394b支持的最高速度为800 Mb·s-1,驱动程序可以在总线复位完成后立即通过C1394GetMaxSpeedToNode或1394Get-MaxSpeedBetweenNodes设置节点间速度。
(2)设置最大包,1394b在S800的速度下所支持的最大包长为4 096 bit,可通过C1394GetMaxPayloadForSpeedand C1394GetMaxPayloadF-orMaxRec设置最大包长。
(3)设置带宽,要注意的是带宽不仅取决于包的大小,还与节点间的传输速率有关,当传输速率增加时,所需的带宽会减小。
(4)异步读/写,异步传输分为阻塞调用和非阻塞调用,C1394ReadNode/C1394WriteNodewei为阻塞调用,只在读或写事务完成 (包括发送请求数据包,检查确认,等待响应或超时)后返回。C1394ReadNodeAsynch/C1394WriteNodeAsynch为非阻塞调用。非阻塞调用比阻塞调用更节省时间,节约资源。
4.2 IEEE1394b等时传输机制
与异步传输不同,等时传输强调了数据的实时性。等时传输是基于时间片的。
建立等时传输的步骤为:(1)设置传输速率,最大为800 Mb·s-1。(2)设置带宽。(3)分配等时信道。(4)分配等时资源。(5)等时事务处理。(6)完成后释放资源。
有时候应用程序并不只发送一个等时请求,那么适配器通道要处理下一个请求,同时程序还要处理上一个请求完成的结果,这样确保等时接收时不会丢数据包,这时要用到等时请求队列来完成。内核模式的API两种等时处理模型,排队一完成和即时一完成,驱动可以使用其中任意一个,如有必要可混合使用。在用户模式中,操作模式有一些限制,不能直接回调,应用程序通常使用排队一完成模式处理所有等时请求。图2和图3分别是排队一完成和即时一完成模型的处理流程图。
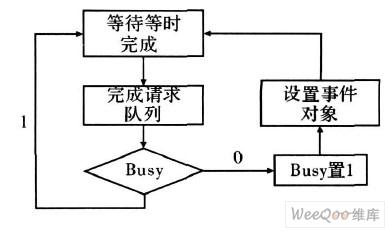
图2 排队~ 完成模型的处理流程图
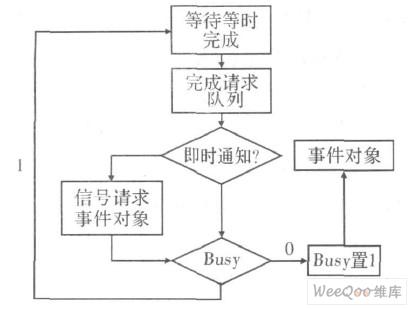
图3 即时- 完成模型的处理流程图
5 结束语
介绍了基于IEEE1394b驱动程序的开发,在此基础之上开发了设备驱动和应用程序,建立了1394组网平台。试验证明,实现了互联与传输,系统能工作在800 Mb·s-1的速率上,达到了预定的目标。
-
电脑
+关注
关注
15文章
1692浏览量
68784 -
总线
+关注
关注
10文章
2878浏览量
88052 -
传输系统
+关注
关注
0文章
152浏览量
37180
发布评论请先 登录
相关推荐
基于IEEE1394b的双向传输设备驱动程序设计

用WinDriver开发适合多平台的设备驱动程序
用WinDriver开发适合多平台的设备驱动程序
IEEE 1394设备的WDM驱动程序设计
基于IEEEl394b总线双向数据传输设备驱动程序设计
PCI设备的WDM驱动程序开发
基于IEEE1394b的双向传输设备驱动程序设计






 工商网监
工商网监
评论